

Для студентов / (1)Векторы / 4Перетворення компонентів векторів при поворотах
.docПеретворення компонентів векторів при поворотах системи координат
В
загальному випадку поворот ДСК є
комбінацією трьох елементарних поворотів,
які описуються кутами Ейлера. Як перший
крок, розглянемо поворот ДСК на кут
![]() навколо
вісі
навколо
вісі
![]() вихідної
системи координат.
вихідної
системи координат.
Компоненти
радіус-вектора
![]() перетворюються стандартним чином:
перетворюються стандартним чином:
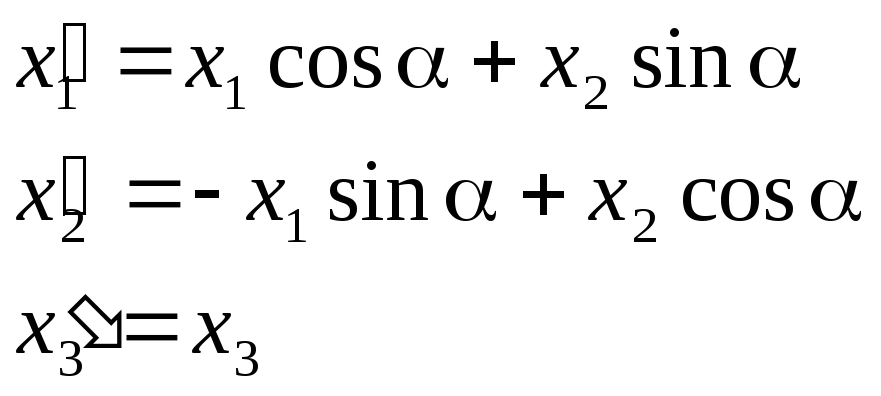 .
(1)
.
(1)
Скориставшись формулами Ейлера:
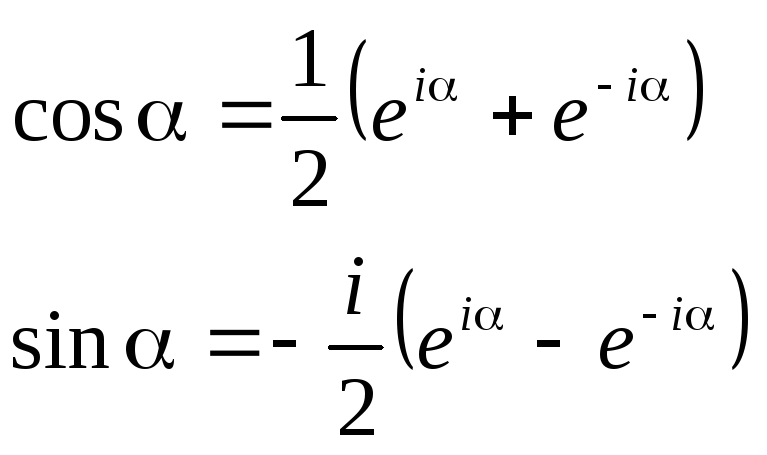 ,
,
перетворення (1) можна переписати у вигляді:
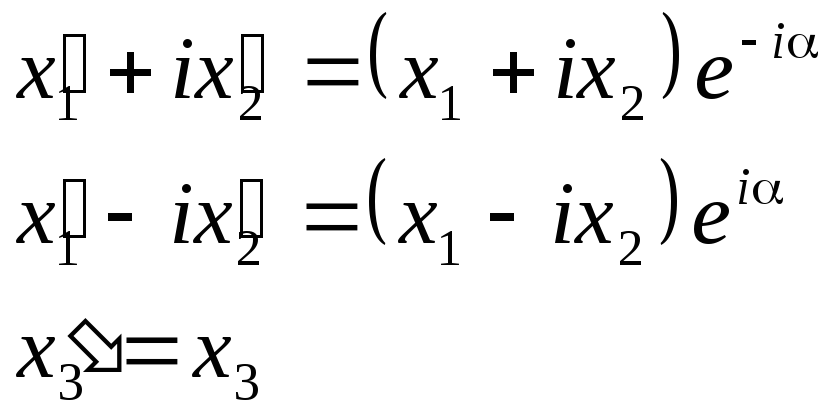 .
(2)
.
(2)
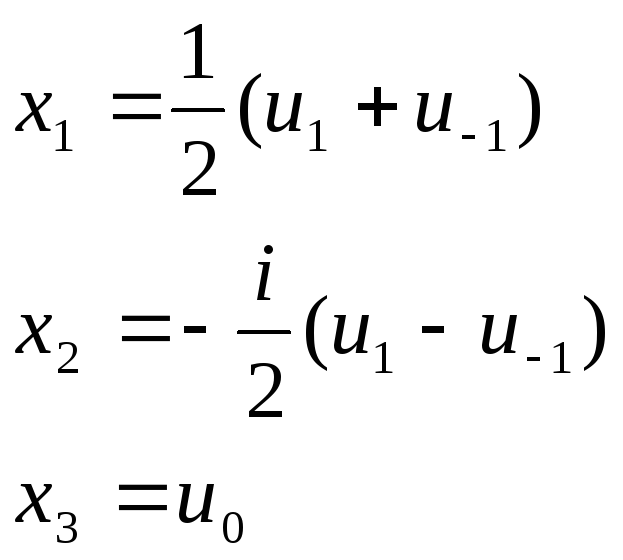
За означенням, комбінації:
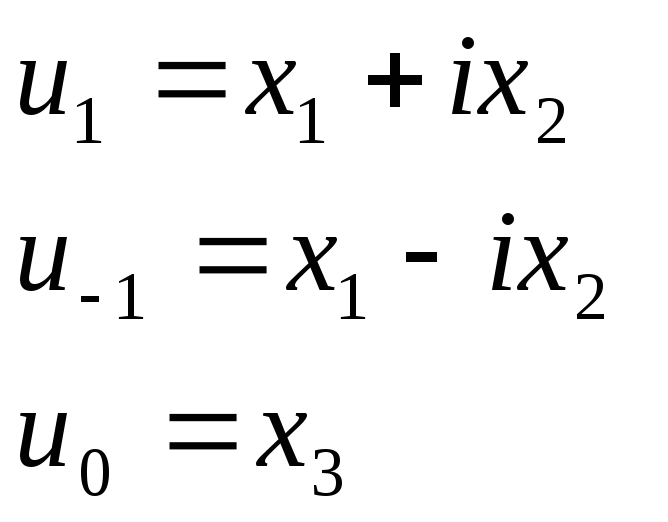 (3)
(3)
прийнято називати циркулярними компонентами радіус-вектора точки. Обернене перетворення компонентів радіус-вектора описується формулами:
 (4)
(4)
Окрім циркулярних
компонентів радіус-вектора можна ввести
також циркулярні базисні вектори. Для
цього замість компонентів
![]() в представлені радіус-вектора
в представлені радіус-вектора
![]() підставимо його циркулярні компоненти.
У такий спосіб отримуємо:
підставимо його циркулярні компоненти.
У такий спосіб отримуємо:
![]() ,
(5)
,
(5)
де
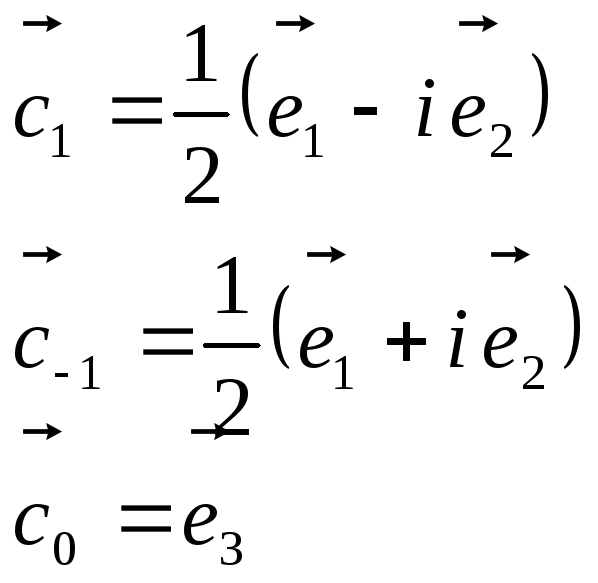 (6)
(6)
є
циркулярні базисні вектори. На відміну
від ортів
![]() вихідної ДСК базисні вектори
вихідної ДСК базисні вектори
![]() не
є ні ортогональними, ні нормованими.
Завдяки уявній одиниці, взагалі,
не
є ні ортогональними, ні нормованими.
Завдяки уявній одиниці, взагалі,
![]() .
.
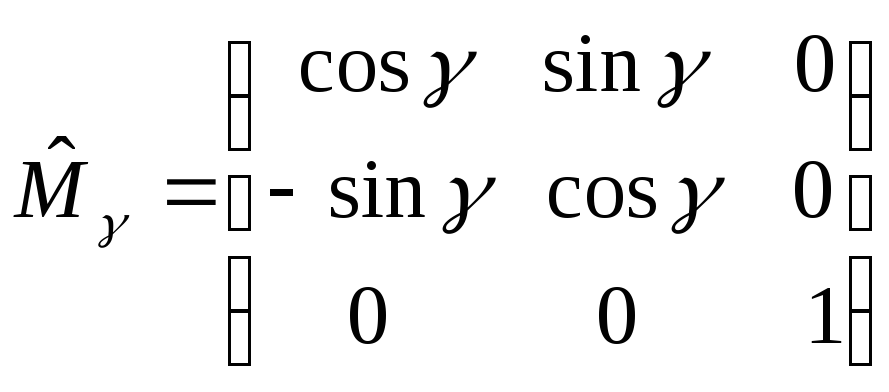
Перетворення
![]() можна подати також в матричній
формі:
можна подати також в матричній
формі:
![]() ,
(7)
,
(7)
де
 ,
,
 ,
,
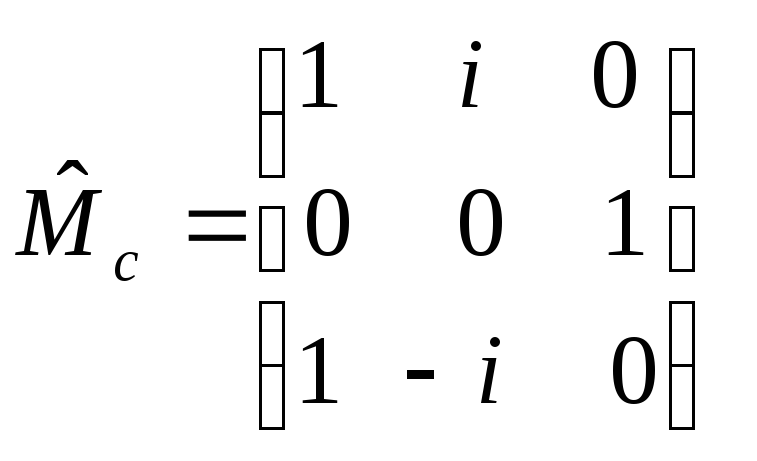 .
(8)
.
(8)
Оберненому перетворенню
![]() (9)
(9)
Відповідає матриця:
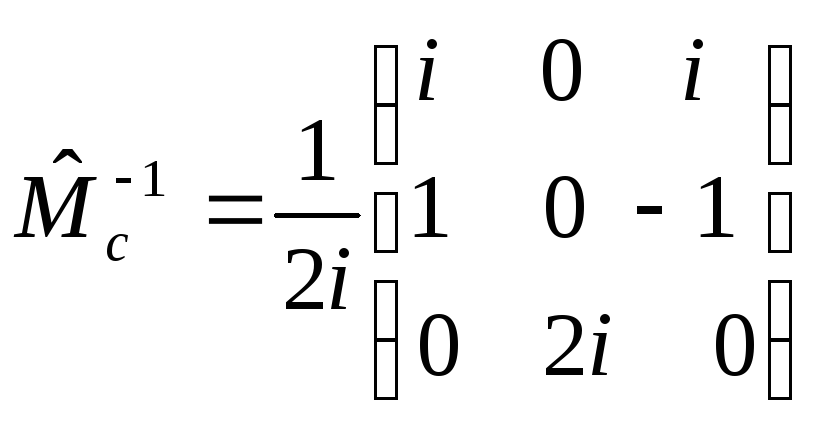 .
(10)
.
(10)
Довільний поворот ДСК можна описати сукупністю трьох послідовних елементарних поворотів:
1)
навколо осі
![]() на
кут
на
кут
![]() ;
2) навколо осі
;
2) навколо осі
![]() на
кут
на
кут
![]() ;
3) навколо осі
;
3) навколо осі
![]() на кут
на кут
![]() .
.
Тут
![]() - вісь нової ДСК, утвореної в результаті
другого поворота. Кути
- вісь нової ДСК, утвореної в результаті
другого поворота. Кути
![]() є
відомими кутами Ейлера.
є
відомими кутами Ейлера.
Компоненти
![]() радіус-вектора в ДСК, утвореній внаслідок
першого елементарного поворота на кут
радіус-вектора в ДСК, утвореній внаслідок
першого елементарного поворота на кут
![]() ,
визначаються рівнянням:
,
визначаються рівнянням:
![]() ,
,
де
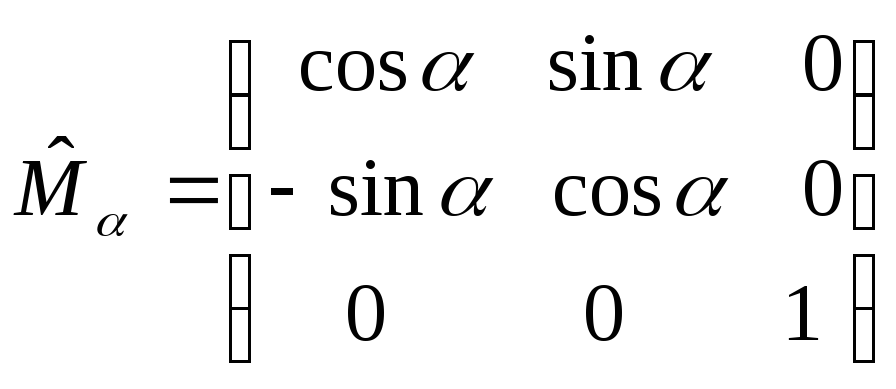 .
(11)
.
(11)
Після
другого поворота компоненти
![]() радіус-вектора в новій ДСК є пов’язаними
з
радіус-вектора в новій ДСК є пов’язаними
з
![]() аналогічним рівнянням:
аналогічним рівнянням:
![]() ,
(12)
,
(12)
де
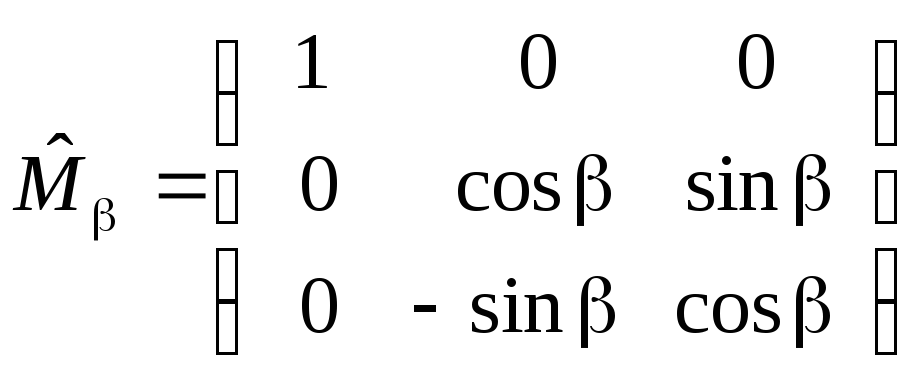 .
(13)
.
(13)
Третій
поворот на кут
![]() виконується навколо осі
виконується навколо осі
![]() .
Йому відповідає наступне перетворення
компонентів радіус-вектора:
.
Йому відповідає наступне перетворення
компонентів радіус-вектора:
![]() ,
(14)
,
(14)
де
 .
(15)
.
(15)
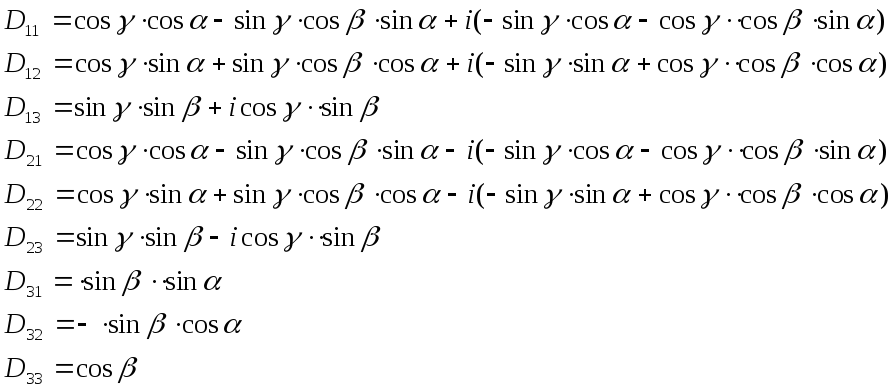
Остаточно, результатом трьох послідовних перетворень компонентів радіус-вектора буде рівняння:
![]() ,
(16)
,
(16)
де
матриця
![]() дорівнює:
дорівнює:

Використовуючи
формули (7), (9) і (16), неважко зрозуміти,
що перехід від вихідних циркулярних
компонентів
![]() до кінцевих
до кінцевих
![]() виконується за допомогою перетворення:
виконується за допомогою перетворення:
![]() .
(17)
.
(17)
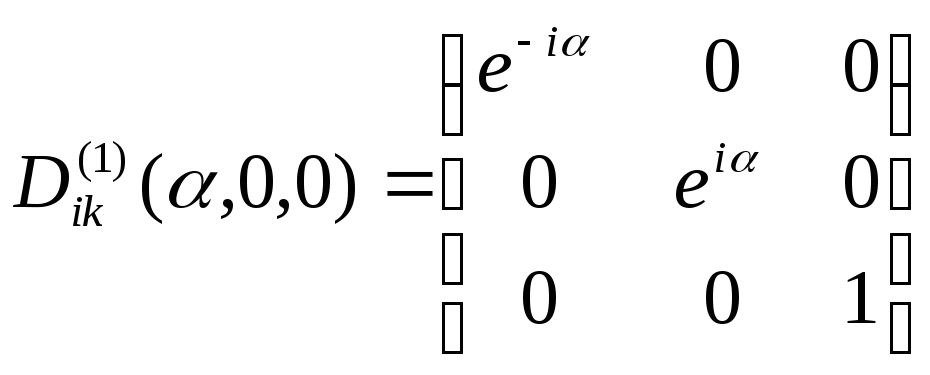
Надаючи формулі (17) вигляд
![]() ,
(18)
,
(18)
ми
приходимо до означення функцій Вігнера
![]() першого порядку. Безпосереднім розрахунком
за формулою (17) можна
впевнитись, що
першого порядку. Безпосереднім розрахунком
за формулою (17) можна
впевнитись, що
Зазначимо, що формули Вігнера знаходять широке застосування в теорії обертального руху, особливо в квантовій механіці.
Циркулярні
компоненти
![]() довільного вектора
довільного вектора
![]() утворюються цілком аналогічно (4):
утворюються цілком аналогічно (4):
![]() =
=![]() ,
(19)
,
(19)
де
![]() - його декартові компоненти. Зв'язок між
декартовими і циркулярними компонентами
вектора
- його декартові компоненти. Зв'язок між
декартовими і циркулярними компонентами
вектора
![]() описується формулами, які є структурно
тотожні (16) і (18):
описується формулами, які є структурно
тотожні (16) і (18):
ДСК:
![]() ,
,
![]() ,
(20)
,
(20)
і
ЦСК:
![]() ,
,
![]() .
(21)
.
(21)
З
умови інваріантності вектора
![]() відносно довільних поворотів систем
координат:
відносно довільних поворотів систем
координат:
![]() ,
,
можна
знайти також матрицю
![]() ,
яка описує перетворення циркулярних
базисних векторів:
,
яка описує перетворення циркулярних
базисних векторів:
![]() .
(22)
.
(22)
Неважко
бачити, що компоненти матриці
![]() задовольняють рівнянню:
задовольняють рівнянню:
![]() .
(23)
.
(23)
Зокрема,
якщо поворотам навколо осі
![]() відповідає (див. (2))
відповідає (див. (2))
 ,
,
то
компоненти матриці
![]() дорівнюють:
дорівнюють:
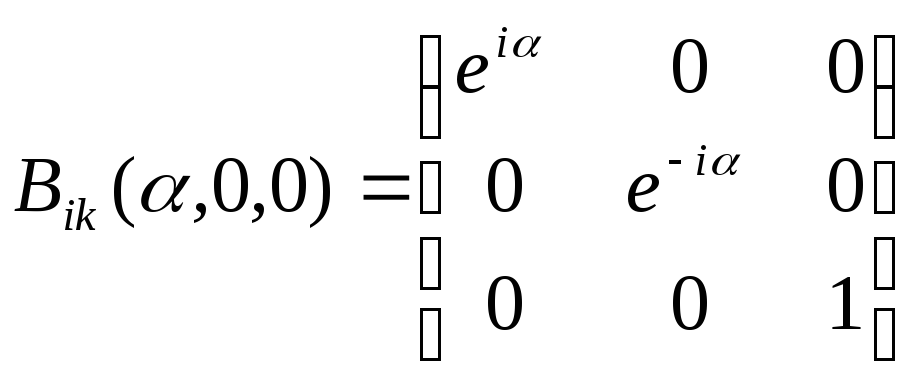 .
(24)
.
(24)