госы мехатроника / 79
.docxДля управления движением в технических системах может быть использован метод оценочных функции. Преимущество метода заключается в использовании простейших арифметических операций за кратчайшее время решается задача определения направления следующего шага.
Основной недостаток метода цифровых дифференциальных анализаторов заключается в накоплении ошибок. Метод оценочных функций свободен от этого недостатка и допускает простую программную реализацию.
Круговая интерполяция. Показанная на Рис.3.53 окружность имеет описание
![]() ;
; ![]() .
.
|
|
||||||||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
|
|
||||||

Составим вновь оценочную функцию
![]()
положительную вне и отрицательную внутри окружности. Запишем приращения оценочной функции
![]()
так что
![]() .
.
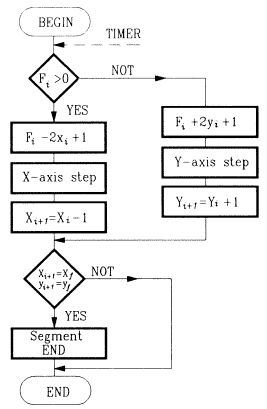
Это
значит для примера дуги окружности,
расположенной в первом квадранте
(см.Рис.3.53), единичными шагами являются ![]() и
алгоритм движения требует единичного
шага по оси Х, когда F>0 и по оси У, когда
F<0. Алгоритм круговой интерполяции
показан на Рис.3.54.
и
алгоритм движения требует единичного
шага по оси Х, когда F>0 и по оси У, когда
F<0. Алгоритм круговой интерполяции
показан на Рис.3.54.
|
|
||||||||
|
|
|
|
||||||
|
|
|
|
||||||