

Глава 5. Механические волны
5.1 Продольные и поперечные волны 53
5.2 Уравнение плоской гармонической волны. Волновое уравнение 54
5.3. Задания для самоконтроля знаний 56
Глава 6. Молекулярное движение
6.1 Размеры и масса молекул 56
6.2. Движение и столкновение молекул газа 57
6.3 Давление и температура 59
6.4 Скорость и энергия молекул [распределение Максвелла] . 60
6.6 Давление идеального газа на стенку 62
6.7 Уравнение состояния идеального газа 81
Глава 7. Основы термодинамики
7.1. Термодинамическая система. Внутренняя энергия идеального газа . 63
7.2. Работа и теплопередача 64
7.3. Первое начало термодинамики, термодинамические изопроцессы 65
7.4 Теплоемкость 67
7.5 Обратимые и необратимые процессы. Термодинамическая вероятность 70
7.6 Изменение энтропии в изопроцессах 72
7.7 Тепловая машина. Цикл Карно 74
7.8. Для самостоятельного изучения 76
Основные понятия в механике 105
Основные законы 111
Обозначения 113
Глава 1. Кинематика материальной точки
Лекция 1
Кинематика поступательного движения
Понятия и определения
Механика – изучает движение тел в пространстве с течением времени.
Движение без учета сил действующих на тело, рассматривается в кинематике, а с учетом их в динамике.
В кинематике тела размерами которых можно пренебречь в условиях данной задачи, представляются в виде материальных точек (м.т) являющихся их моделью. Положение м.т. в пространстве определяется с помощью системы координатX,Y,Z, связанной с неподвижным телом (телом отсчета)
Совокупность тела отсчета, жестко связанной с ним системы координат и часов, называется системой отсчета.
П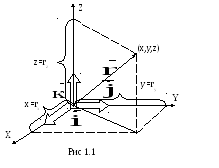 оложение
материальной точки в декартовой системе
координат задается ее координатами x,
y, z или радиус-вектором
оложение
материальной точки в декартовой системе
координат задается ее координатами x,
y, z или радиус-вектором![]() ,
проведенный в заданную точку из начала
координат (рис 1.1). Радиус-вектор
,
проведенный в заданную точку из начала
координат (рис 1.1). Радиус-вектор![]() и
его проекции на оси координат определяются
из соотношений:
и
его проекции на оси координат определяются
из соотношений:
![]()
![]() , (1.1)
, (1.1)
г![]() де
де![]() –
–
единичные векторы осей координат.
Модуль вектора
![]()
![]() (1.2)
(1.2)
При движении м.т. относительно выбранной
системы отсчета ее радиус-вектор и его
координаты![]() зависят от времени.
зависят от времени.
 (1.3)
(1.3)
Т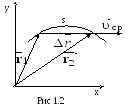 раектория
движения м.т в пространстве определяется
совокупностью всех ее последовательных
положений в пространстве. Уравнение
траекторииz=z(x,y) находится
в результате решения системы уравнений
(1.3) путем исключения параметра
t.
раектория
движения м.т в пространстве определяется
совокупностью всех ее последовательных
положений в пространстве. Уравнение
траекторииz=z(x,y) находится
в результате решения системы уравнений
(1.3) путем исключения параметра
t.
Движение называется прямолинейным,
если его траектория – прямая линия, икриволинейнымво всех других случаях.
Вид траектории не зависит от выбора
системы отсчета. При движении м.т. по
криволинейной траектории в выбранной
системе отсчета, за интервал времени![]() радиус-вектор изменяется на величину
радиус-вектор изменяется на величину![]() ,
а точка проходит пустьs.
,
а точка проходит пустьs.
Путьможет быть больше модуля
вектора перемещения или равен ему.
Равенство наблюдается только в частных
случаях – при прямолинейном движении
тела в одном направлении, и для бесконечно
малых промежутков времени![]() .
.
Для характеристики движения м.т. вводят понятие средней и мгновенной скорости.
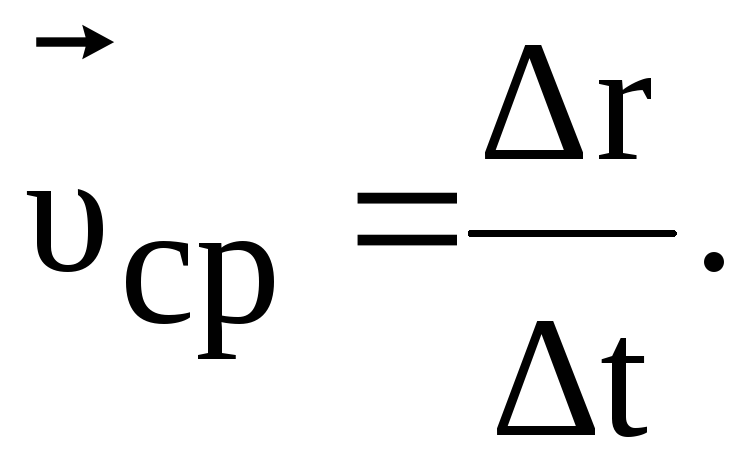
С
 редней
скоростьюназывается вектор, равный
отношению вектора перемещения
редней
скоростьюназывается вектор, равный
отношению вектора перемещения![]() к промежутку времени
к промежутку времени![]() ,
в течение которого произошло перемещение
м.т.
,
в течение которого произошло перемещение
м.т.
Направление
![]() ,
совпадает с направлением вектора
перемещения
,
совпадает с направлением вектора
перемещения![]() ,
(
,
(![]() )
(рис 1.2)
)
(рис 1.2)
Мгновенной скоростью называется
предельное значение вектора средней
скорости при стремлении![]() к нулю
к нулю
![]() (1.4)
(1.4)
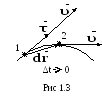
Вектор перемещения
![]() и скорость
и скорость![]() направлены по секущей и при стремлении
направлены по секущей и при стремлении![]() к нулю образуют к касательную в точке
1 (рис. 1.3).
к нулю образуют к касательную в точке
1 (рис. 1.3).
Модуль мгновенной скорости путевая скорость определяется из соотношения
![]() ,
(1.5)
,
(1.5)
где ![]() -
путь пройденный точкой за интервал
времениdt
-
путь пройденный точкой за интервал
времениdt
Путь, пройденный материальной точкой за интервал времени от t1доt2
 (1.6)
(1.6)
С учетом соотношений (1.1)
 (1.7)
(1.7)
где
![]() – проекции скорости точки на оси
координат.
– проекции скорости точки на оси
координат.
Модуль вектора скорости в декартовой системе координат
![]() (1.8)
(1.8)
В процессе движения направление и модуль
вектора скорости ![]() м.т. могут изменяться. Изменение скорости
м.т. могут изменяться. Изменение скорости![]() определяется
векторам ускорения
определяется
векторам ускорения![]() .
.
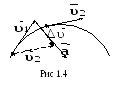
П

 о
аналогии со средней и мгновенной
скоростью вводят понятие среднего и
мгновенного ускорения. Пусть в момент
времени t1м.т. имеет скорость
о
аналогии со средней и мгновенной
скоростью вводят понятие среднего и
мгновенного ускорения. Пусть в момент
времени t1м.т. имеет скорость![]() ,
а в моментt2–
скорость
,
а в моментt2–
скорость![]() (рис.
1.4) . Тогда за промежуток времени
(рис.
1.4) . Тогда за промежуток времени![]() вектор скорости изменится на величину
вектор скорости изменится на величину![]() ,
а среднее ускорение
,
а среднее ускорение

![]() (1.9)
(1.9)
Вектор![]() ,
совпадает с вектором .
,
совпадает с вектором .
Мгновенное ускорение
![]() (1.10)
(1.10)
где![]() (рис. 1.4)
(рис. 1.4)
С учетом соотношений (1.1) и (1.7)
![]() (1.11 )
(1.11 )
![]()
где  – проекции
ускорения точки на оси координат.
– проекции
ускорения точки на оси координат.