

Локомотивное оборудование
Локомотивный компьютер EVC. На каждой единице тягового подвижного состава в качестве центрального вычислительного устройства установлен безопасный бортовой компьютер EVC, которому в рамках платформы TIGRIS присвоено обозначение VCU -Vehicle Control Unit. Компьютер VCU реализует всю логику системы FSS, включая различные режимы эксплуатации, а также контроль скорости и кривой ее изменения при торможении. Обмен информацией между всеми модулями осуществляется посредством интерфейса с локомотивной шиной MVB.
В состав семейства MITRAC входят малые вычислительные модули - связные контроллеры СОМС. Эти модули устанавливают на локомотиве в тех случаях, когда необходимо реализовать сложные интерфейсы местного обмена информацией внутри групп модулей.
Антенна для связи с приемоответчиком. Для связи с путевыми приемоответчиками на локомотиве используется антенна типа CAU и компактный антенный модуль CAU с модулем передачи данных ВТМ. Передаваемые антенной импульсы обеспечивают путевой приемоответчик энергией и одновременно несут в себе запрос на передачу содержащейся в памяти приемоответчика информации.
Кодовый сигнал, принятый антенной CAU, дешифруется модулем ВТМ. Полученные данные модуль ВТМ по локомотивной шине MVB передает в бортовой компьютер.
Импульсный колесный датчик и модуль измерения скорости и пройденного пути. Генерируемые оптическим импульсным колесным датчиком OPG сигналы обрабатываются в модуле измерения скорости и пройденного пути (SDU) и по шине MVB передаются в локомотивный компьютер.
Цифровые входы и выходы. Для управления подсистемами и, особенно, тормозными средствами локомотива используются цифровые модули ввода/вывода. При этом различают модули VDX для выполнения ответственных функций, связанных с выполнением условий безопасности, и модули DX для обычных задач. В некоторых случаях оптимальным решением является объединение нескольких модулей VDX и DX в общий интерфейс посредством модуля СОМС. Число и уровень сложности интерфейсов зависят от типа конкретной единицы подвижного состава.
Локомотивный модуль безопасной передачи. Модуль STU предназначен для шифровки пересылаемых по сети GSM-R данных и реализован на базе аппаратуры платформы TIGRIS.
Антенна системы GSM-R. Модуль радиоантенны RAU является стандартным устройством для всех единиц подвижного состава, оборудованных системой радиосвязи GSM-R. Место расположения антенны на локомотиве может изменяться в зависимости от типа подвижного состава и габарита приближения строений. Рассматриваемый модуль соединяется с телекоммуникационным блоком Tk-Box, который подключен к локомотивной шине.
Оборудование локомотивного пульта управления Модуль отображения и ввода данных включает в себя современный дисплей с сенсорным экраном, который встраивается в пульт машиниста. Этот модуль имеет ряд интерфейсов со всеми существующими органами управления локомотивом. Компьютер этого модуля содержит интерфейс с шиной MVB, через которою он получает информацию от локомотивного компьютера EVC.
Особенности системы ETCS уровня 3 и проблемы контроля состояния путевых участков на станциях
Существующие нормативные документы по системе ETCS уровня 3 ориентированы преимущественно на регламентацию поездных передвижений на перегоне с контролем полносоставности локомотивными средствами. Это связано с тем, что эта система предусматривает полный отказ от устройств контроля свободности пути. Поезда, определяя свое местоположение при помощи путевых приемоответчиков, обмениваются этой информацией и командами на движение с распорядительным центром АБ на базе радиосвязи RBC.
В настоящее время при выполнении маневров лицо, ответственное за передвижения маневровых составов по станции, располагает информацией о состоянии путей и стрелочных секций. Эта информация поступает от напольных устройств контроля состояния пути, что позволяет предотвратить все опасные ситуации. Учитывая, что основополагающим принципом системы ETCS уровня 3 является отказ от напольных устройств контроля свободности пути, то по-прежнему сохраняется задача выявления всех подвижных единиц на путевом развитии станции. В то же время, если поезда, находящиеся на станционных путях, при помощи локомотивных устройств передают сообщения о своем местоположении и контролируют свою полносоставность, то при маневровых передвижениях возможны случаи, когда на отдельных путях или стрелочных секциях могут находиться вагоны без локомотива (рис. 7.6).

Рис. 7.6. Вариант размещения подвижного состава на станции
Решением противоречий между идеологией построения системы ETCS уровня 3 и потребностью контроля места нахождения отдельных вагонов может быть разделение станций на специальные зоны. Эти зоны должны иметь четкое разграничение о характере движения по ним подвижных железнодорожных единиц и обеспечению безопасности движения.
В зонах, предназначенных для выполнения маневровых передвижений, могут быть сохранены имеющиеся РЦ или счетчики осей, требующие значительных эксплуатационных расходов. Одним из перспективных способов определения местоположения подвижного состава на станционных путях и стрелочных секциях в рассматриваемой системе предусматривается установка специальных датчиков на всех железнодорожных подвижных единицах, кроме локомотивов, на которых уже имеются необходимые устройства. Встроенные в них передатчики регулярно транслируют информацию о своем местоположении в компьютер ЭЦ, который анализирует поступающие данные и формирует динамическую модель состояние путей и участков в пределах станции.
Следует отметить, что такие датчики уже разработаны и эксплуатируются на ряде железных дорог Европы, несмотря на то, что имеют высокую стоимость. Эксплуатация таких датчиков указала на необходимость пересмотра функциональной безопасности и надежности системы ЭЦ в целом из-за случаев их отказов.
Для контроля свободности станционных путей и стрелочных секций предлагается использование радаров (рис. 7.7).
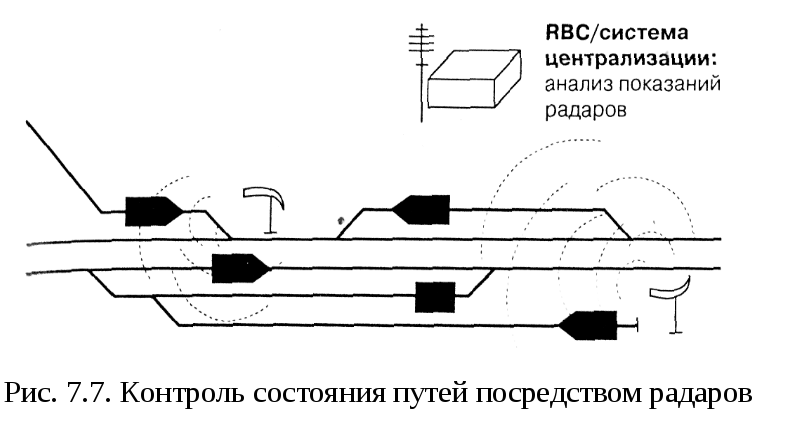
Известно, что радар хорошо приспособлен для контроля территории станций с незастроенными пространствами. В зависимости от местных условий на станции могут использоваться две-три антенные установки, которые непрерывно сканируют станционные пути. Полученные данные анализируются компьютером, после чего формируется информация о состоянии путей и передается в систему централизации или RBC. При этом необходимо обеспечить, чтобы получаемые радаром данные были не менее достоверными, чем у существующих традиционных систем, а сама радарная установка обладала достаточно высокой эксплуатационной готовностью.
Одновременно с разработкой специальных железнодорожных датчиков и радаров рассматривалась возможность создания программных средств, способных алгоритмически определять состояние станционных путей и стрелочных секций. Предполагается, что при каждом маневровом передвижении компьютер автоматически маркирует оставшийся на путях подвижной состав и этот маркер соответствует виртуальному извещению о местоположении подвижного состава. Однако до настоящего времени пока остаются нерешенными вопросы инициирования такого виртуального определения местоположения подвижного состава, так как рассматриваемая основополагающая информация не должна зависеть от надежности работы оперативного и обслуживающего персонала.
В технической и научной литературе по этому вопросу рассматривается возможность использования для указанной цели комбинированного способа. Суть его заключается в разделении станции на три района: поездной работы, передаточного и маневрового (рис. 7.8).
В районе поездной работы предполагается отказаться от устройств контроля состояния станционных путей и стрелочных секций, поскольку здесь запрещаются маневры и разделение поездов.
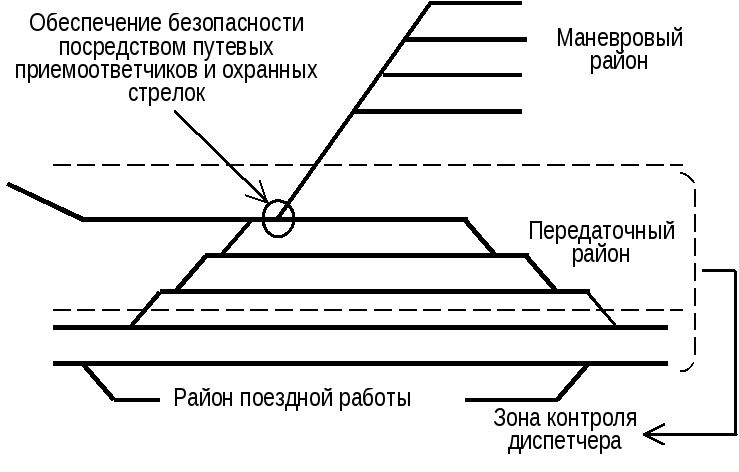
Рис. 7.8. Комбинированный контроль свободности путей на станции
Все виды работ с поездами предполагается выполнять в передаточном районе, который может быть оборудован традиционными средствами контроля свободности пути. Для допуска поездов в этот район должно быть получено извещение о состоянии всех стрелочных секций.
В маневровом районе предполагается использовать комбинированные устройства контроля состояния станционных путей и стрелочных секций. Такое разделение станции позволит сократить до минимума потребность в ее техническом оборудовании и снизить эксплуатационные расходы.