

цифровой скоростемер;
бортовой минилокатор;
пассивные приемоответчики;
цифровая локомотивная КВ радиостанция;
цифровая стационарная КВ радиостанция;
Автоматизированное рабочее место поездного диспетчера (арм-днц).
В качестве одного из вариантов исполнения разрабатываемая система может быть применена для задач диспетчерского управления маневровыми локомотивами в пределах станции. При этом вместо цифровых КВ радиостанций могут применяться современные радиостанции УКВ диапазона, оснащенные устройствами цифровой обработки сигналов, а пассивные приемоответчики должны устанавливаться через 100÷500 м, а также перед стрелками для фиксации перехода локомотива на соседний путь. Точность определения местоположения локомотива при этом может достигать до 0,5 м.
6.3.1 Составные части системы
Цифровой скоростемер состоит из датчика скорости 1 и контроллера вычисления скорости 2 (рис. 6.9), а также пройденного пути локомотивом в пределах диспетчерского круга. Кроме вычисления скорости и определения пройденного пути с момента регистрации в диспетчерском круге контроллер обеспечивает суммарный учет пробега локомотива с записью в электрически программируемую память.
Датчик скорости выполнен в герметичном стальном пыле- и маслонепроницаемом корпусе диаметром 60 мм и толщиной 14 мм и размещается на приводном валу локомотива в месте стыковки со штатным скоростемером СЛ2.
Контроллер вычисления скорости и пройденного пути выполняет следующие функции:
Обеспечивает прием информации от корректирующего локатора и выполняет корректировку показаний скоростемера с учетом износа бандажа колесных пар;

Рис.6.9. Опытный образец цифрового скоростемера
ведет учет и регистрацию на специальном электронном картридже степени износа бандажей колес локомотива, времени и фактов несоответствия скорости движения локомотива относительно состояния светофора;
преобразует вычисленные значения скорости движения локомотива, пройденный путь от начала движения в диспетчерском круге и состояние светофоров в цифровую информацию, которая затем передается в устройство цифровой обработки сигналов цифровой КВ локомотивной радиостанции для дальнейшей передачи ее на ПЭВМ поездного диспетчера.
Измеряемые цифровым скоростемером параметры отображаются на локомотивном минимониторе. Контроллер сопрягается с цифровой локомотивной радиостанцией через пульт управления этой радиостанции по стандартному стыку RS232.
Бортовой корректирующий минилокатор представляет собой маломощное приемо-передающее устройство, работающее на принципах радиолокатора. Он состоит из микромощного генератора специальных высокочастотных сигналов, нагруженного на малогабаритную передающую антенну, и синхронного приемного устройства, нагруженного на малогабаритную приемную антенну.
Принцип выработки корректирующей ошибки состоит в следующем. Пассивные приемоответчики устанавливаются на железнодорожных перегонах с равномерным шагом от 10 км до 50-100 км. Сигнал минилокатора переизлучается пассивным приемоответчиком. Мощность переизлученного сигнала значительно больше, чем отраженные сигналы от окружающих предметов и поэтому приемное устройство безошибочно выделяет такие сигналы. Переизлученный сигнал поступает в приемное устройство, которое по принятому сигналу с точностью ± 4 м при максимальной скорости 200 км/ч вырабатывает соответствующий признак. Этот признак обнаружения пассивного приемоответчика поступает в контроллер цифрового скоростемера, который регистрирует время поступления этого сигнала (первая отметка) и фиксирует показания скоростемера.
Через калиброванный отрезок пути, равный шагу установки пассивных приемоответчиков, минилокатор вырабатывает вторую отметку, на основании которой контроллер скоростемера фиксирует величину пройденного пути, измеренную цифровым скоростемером. На основе сравнения длины калиброванного участка с измеренным значением пути контроллер вырабатывает корректирующую поправку. Алгоритм выработки поправки учитывает и случайные пропуски пассивных приемоответчиков и варианты перехода локомотива с одного перегона на другой, если каждый такой пропуск не превышает 300 км пути.
Пассивный приемоответчик конструктивно состоит из двух специальных, близко расположенных стальных коробок-антенн, соединенных между собой коаксиальным кабелем. Пассивные приемоответчики устанавливаются вдоль железнодорожного полотна на высоте не более 0,4 м. При наличии пассивных приемоответчиков скоростемер и бортовой корректирующий минилокатор обеспечивают измерение скорости движения локомотивов с точностью до 0,1 км/час при максимальной скорости движения локомотива до 200 км/час.
Цифровая КВ локомотивная радиостанция состоит из приемопередатчика, пульта управления, блока питания (рис. 6.10).
Приемопередатчик включает в себя двухканальный приемный и передающий тракты и процессор цифровой обработки сигналов. Приемный тракт построен по схеме прямого преобразования радиочастотного сигнала в цифровую форму в динамическом диапазоне около 80 дБ. На входе преселектора установлен аттенюатор для автоматического снижения уровня сигнала при превышении динамического диапазона.
Рис. 6.10. Структурная
схема сопряжения цифровой локомотивной
радиостанции с источниками
параметров
движения локомотива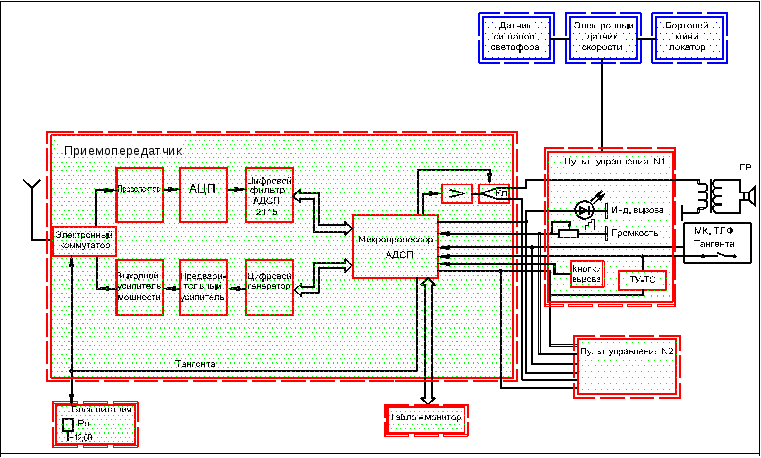
Цифровая часть приемного канала реализована на сигнальных процессорах и выполняет одновременную обработку информации двух рабочих каналов 2130 кГц и 2150 кГц, обеспечивая тем самым возможность одновременной работы в системе, а также цифровыми и речевыми компонентами.
Передающий тракт состоит из усилителя мощности и цифрового генератора модулированных радиосигналов. Цифровой генератор обеспечивает возможность формирования цифровой манипуляции и аналоговой (фазовой) речевой модуляции. На выходе усилителя мощности установлен датчик обратной связи для настройки по минимуму отраженной волны и для защиты при обрыве антенны.
Процессор цифровой обработки сигналов построен на современном сигнальном процессоре типа ADSP, благодаря чему он выполняет функции низкочастотной фильтрации цифровых, речевых и вызывных сигналов, а также функцию формирования пакетов информации и автоматизированного управления работой радиостанции.
Габаритные размеры приемопередатчика 130х180х45 мм. Пульт управления радиостанцией построен по схеме контроллера управления и обеспечивает возможность задания с малой клавиатуры команд для регистрации локомотива в диспетчерском круге и вызовов ДНЦ и ДСП с отдельных кнопок. Все сигналы и команды управления от пульта управления на приемопередатчик передаются в цифровой форме и отображаются на миниатюрном мониторе.
Цифровая стационарная радиостанция состоит из приемопередатчика, аналогичного локомотивной радиостанции, процессора низкочастотной фильтрации, ПЭВМ и блока сопряжения с линией. Процессор низкочастотной фильтрации совместно с ПЭВМ обеспечивает расфильтровку цифровых сигналов и речи, а также преобразования пригодного для передачи их по каналу тональной частоты 0,3 ÷ 3,4 кГц. Такой алгоритм функционирования радиостанции позволяет выделять цифровой и речевой сигналы без создания помех друг другу. На основе ПЭВМ стационарной радиостанции создается рабочее место ДСП с обеспечением возможности:
управления цифровой стационарной радиостанцией с клавиатуры;
подачи вызовов и ведения голосовой радиосвязи;
автоматической регистрации всех переговоров;
тестирования работоспособности канала связи как с локомотивами, так и с поездным диспетчером.
АРМ поездного диспетчера (АРМ-ДНЦ) состоит из блока цифровой обработки НЧ сигналов, сопряжения с ТЧ каналом и ПЭВМ. Блок цифровой обработки выполняет функцию модема для приема/передачи цифровой информации по ТЧ каналу и совместно с ПЭВМ производит цифровую расфильтровку сигналов. ПЭВМ выполняет функции автоматизированного управления регистрацией локомотива в диспетчерском круге, считывание каждые 9 с информации с локомотивов, обработку результатов и выдачу их в параметрах, удобных для диспетчерского управления: № поезда, № локомотива, его текущая скорость, показание локомотивного индикатора, местоположение поезда на перегоне, пройденное расстояние поездом от начальной точки движения в диспетчерском круге. В автоматизированном режиме АРМ формирует циркулярные сигналы опроса локомотивов и принимает информацию от локомотивов по специальной временной диаграмме, которая увязана с изменением числа поездов в диспетчерском круге и очередностью их регистрации. Вся перечисленная информация выводится на монитор ПЭВМ/ локомотивный индикатор и обновляется по мере опроса локомотивов. АРМ имеет возможность записи переговоров в поездной радиосвязи и регистрации цифровой информации от локомотивов на ПЭВМ, а также хранение ее до 10 суток.