

6.2 Классификация и технические характеристики систем спутниковой навигации
6.2.1 Системы спутниковой навигации
На магистральных железных дорогах необходимо, чтобы машинист был способен активно вмешиваться в процесс управления поездом при непредвиденных ситуациях. К таким ситуациям можно отнести упавший контактный провод, опасную ситуацию на переезде, сдвинутый груз и т.д.
Учитывая это, машинист должен постоянно ощущать ответственность за управление поездом, будучи уверенным, что он его ведет по собственному усмотрению. В противном случае работа машиниста станет монотонной, что приведет его к потере бдительности и, возможно, к ощущению утомления.
С другой стороны, машинист в процессе работы может допускать ошибки и в критических ситуациях его деятельность необходимо контролировать специальными устройствами. Данные устройства не должны влиять на процесс управления поездом в тех случаях, когда условия безопасности движения выполняются. В противном случае, по заранее установленным правилам, они должны вступить в действие и снизить скорость движения поезда или остановить его.
Таким образом, многофункциональные локомотивные устройства обеспечения безопасности движения поезда с рациональной степенью контроля действий машиниста представляютсобой, в сочетании с эффективными системами интервального регулирования, комплекс безопасного движения поездов на перегонах. Этот комплекс при полном диагностировании и своевременном обслуживании в максимальной мере избавлен от опасных ошибок.
Дальнейшее совершенствование систем ИРДП на перегоне может осуществляться по двум направлениям.
Первое - это разработка и внедрение новых путевых и других датчиков, устройств диспетчерского управления и контроля, устройств записи и считывания данных, а также новейших средств передачи информации. Эти “наземные” устройства, как известно, должны быть размещены на всей сети железных дорог и представляют собой дорогостоящее оборудование.
Эффективность этих устройств во многом зависит от оборудования парка подвижного состава различными датчиками и их взаимосвязи с путевыми считывающими устройствами.
Второе - это использование систем спутниковой навигации для получения информации о местонахождении, скорости и времени движения поезда с локомотивами, оборудованными системами, подобными системе КУРС-Б.
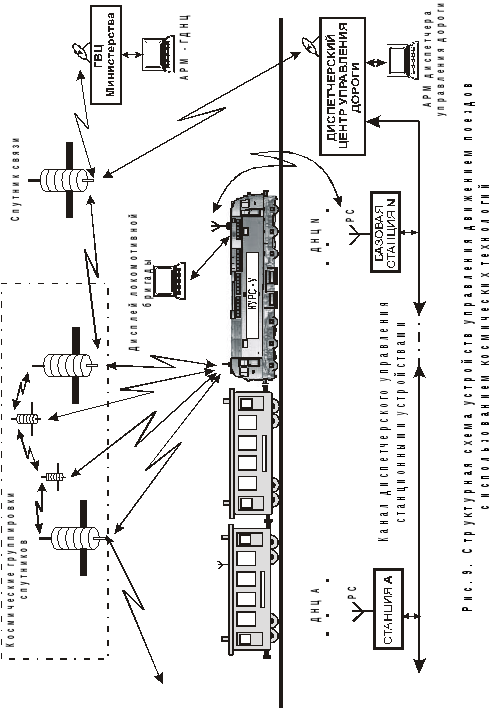
Таким образом, в качестве одного из перспективных направлений развития железнодорожной технологической радиосвязивыбрана спутниковая радиосвязь. Спутниковая радиосвязь при ее высокой информативности наиболее мобильна и оперативна по сравнению с другими системами и в то же время обладаетсвойством глобального размаха. Для железнодорожного транспорта наибольший интерес представляетиспользование спутниковой связи для организации передачи данных и телефонии. Наряду снемобильной спутниковой связью железнодорожного транспортанеобходимо дальнейшее совершенствование и поездной спутниковой радиосвязи. Такая связь, кроме решения специфических технологических задач,связанных с обеспечением функционирования АСУ железнодорожнымтранспортом, может использоваться для ведения служебныхпереговоров между ответственными работниками железнодорожноготранспорта и обеспечения контроля прохождения особо важных грузов и т. д.
Системы диспетчерского управления и контроля транспортных средств (AutomaticVehicleLocation)обеспечивают оперативный контроль и управление транспортнымисредствами предприятия, безопасность при перевозке особо важных и опасных грузов, а также пассажиров. Системы функционируют следующим образом: на транспортные средства устанавливается бортовой комплект, включающий GPS-прибор, контроллер,средство передачи информации, с помощью которого осуществляетсяопределение текущих координат, скорости, курса и другой важной информации. Эта информация обрабатывается и передается в диспетчерский центр (ДЦ), где осуществляется визуальный контроль местонахождения, параметров движения и состояния транспортных средств по электронной карте местности.
Использование систем спутниковой навигации (ССН) позволит обрабатывать информацию обо всех поездах на сети железных дорог Украины, не дожидаясь перехода их через стыковые и другие пункты дорог. Это значительно расширяет возможности взаимодействия диспетчерского аппарата с системами управления и подвижными объектами. В их состав может входить “интеллектуальный” ДЦ и “интеллектуальная” станция, эффективно управляющая поездной и маневровой работой, а также перегон без дорогостоящих напольных устройств.
6.2.2 Технические характеристики спутниковых радионавигационных систем.
Принцип действия ССН основан на возможности определения параметров движения искусственного спутника земли (ИСЗ) по результатам измерения в точке с известными координатами доплеровского сдвига частоты сигнала, передаваемого с ИСЗ и наоборот, по измерениям доплеровского сдвига при известных координатах ИСЗ найти координаты объекта наблюдения.
Первые спутниковые
радионавигационные системы (СРНС) были
созданы в начале 1960-х годов в СССР и США.
В них использовались от четырех до шести
навигационных ИСЗ, расположенных на
низких круговых орбитах порядка 1000 км
и наклоном порядка 830,
равномерным распределением плоскостей
орбит вдоль экватора и использованием
для навигационных определений сигнала
одного ИСЗ, оказавшегося в зоне
радиовидимости наблюдателя. Время
навигационного сеанса составляло около
10-16 мин. при периодичности 1,5-2 ч.
Точность местоопределения зависела от
точности оценки объекта. Например, при
погрешности измерения скорости
потребителя
![]() =0,5 м/с
погрешность местоопределения составляла
500 м, а неподвижного объекта – порядка
50 м. В сеансе навигации определялись
только горизонтальные координаты
объекта наблюдения без определения
высоты его местоположения. В то же время
специфика железнодорожного транспорта
как раз и обуславливает необходимость
только двухкоординатных определений.
=0,5 м/с
погрешность местоопределения составляла
500 м, а неподвижного объекта – порядка
50 м. В сеансе навигации определялись
только горизонтальные координаты
объекта наблюдения без определения
высоты его местоположения. В то же время
специфика железнодорожного транспорта
как раз и обуславливает необходимость
только двухкоординатных определений.
Таким образом, СРНС первого поколения обладали следующими серьезными недостатками: низкой точностью определения координат и большим интервалом времени между обсервациями. Несоответствие их требованиям высокоточного непрерывного навигационного обеспечения потребовало разработки технических средств, лишенных указанных выше недостатков. Характерные особенности СРНС второго поколения заключаются в применении средневысотных ИСЗ и использовании для навигационных определений сигналов нескольких одновременно находящихся в зоне радиовидимости ИСЗ. На сегодняшний день работают две ССН второго поколения:
глобальная навигационная спутниковая система Министерства обороны Российской Федерации – ГЛОНАСС;
глобальная система позиционирования Министерства обороны США NAVSTAR (Global Positioning System - GPS).
В системе NAVSTAR (GPS) используется кодовое разделение каналов, поэтому все ИСЗ излучают сигналы одной и той же несущей частоты. В ГЛОНАСС применяется частотное разделение сигналов, поэтому ИСЗ излучают сигналы на разных несущих частотах. Для уменьшения занимаемого частотного диапазона ИСЗ, находящиеся в одной орбитальной плоскости, но по разные стороны Земли и одновременно не видимые, могут работать на одних и тех же литерных частотах.
В 2008 году планируется старт европейской системы Galileo, которая в значительной мере совместима с GPS.
В настоящее время на железных дорогах для определения местоположения локомотива все более широкое применение находят комбинированные приемники, осуществляющие автоматический поиск, прием и обработку сигналов спутниковыхрадионавигационных систем ГЛОНАСС и NAVSTAR (GPS). Приемники позволяют непрерывно определять значения географических координат (широту и долготу) и пройденный путь транспортного средства, а также астрономическое время и скорость движения поезда. В частности, в России разработан навигационный приемниктипа МРК-14. Он входит в состав локомотивной аппаратуры и может работать в трех режимах: только со спутникамиGPS; только со спутниками ГЛОНАСС; совместно со спутниками ГЛОНАСС и GPS.
Этот приемник имеет следующие характеристики:
погрешность определения местонахождения по линии движения - не более 30 м;
погрешность определения путевой скорости - не более 0,1 м/с;
погрешность определения бортового времени относительно Государственного эталона времени и частоты - не более 1 с;
повторный захват сигнала спутника при его кратковременнойпотере в результате «затемнения» - не более 20 с.
Данный приемник обеспечивает автоматическое обновление, запись и хранение альманахов систем спутников.
Навигационная аппаратура ведет одновременный прием информации по 12 каналам. Точность автономного определения скорости (с вероятностью 95 %) составляет 0,1 м/с, метки единого времени относительно времени UTC - 1 мкс. Среднеквадратическая горизонтальная ошибка автономного определения положения - 25 м, а среднеквадратическая горизонтальная ошибка определения положения на станции относительно опорного станционного приемника - 2 м. Приемники обеспечивают устойчивую работу как при запуске без известного альманаха CHC GPS и ГЛОНАСС («холодный старт»), так и при известной априорной информации («теплый старт»).
Передача данных на локомотив в новых системах осуществляется несколькими способами. Работу путевых устройств АЛСН и АЛС-ЕН дополняют радиоканал системы координатного регулирования движения поездов, путевые индукторы точечной передачи и радиоканал маневровой автоматической локомотивной сигнализации МАЛС (рис. 6.8).
Система спутниковой связи (ССС) включает в себя три основных комплекса:
наземный (наземные станции различного назначения стационарного и мобильного базирования);
космический (спутниковой связи);
управления (АСУ управления ССС).
Под космическим комплексом понимается группировка спутников связи, находящихся на орбитах, присущих данной системе связи. Выбор орбиты диктуется кругом решаемых задач, возможностями имеющейся аппаратуры, включая и источники питания аппаратурных комплексов, и рядом других факторов. В последние годы, следуя существующим за рубежом тенденциям, для связи стали широко использовать орбитальные группировки, размещенные на средних и низких орбитах. Не умаляя достоинства такого подхода, можно отметить, что в настоящее время в ССС преимущественно используется геостационарная и высокоэллиптическая орбиты.
Недостаток геостационарной орбиты связан с тем, что с наземных станций, расположенных в северных широтах, геостационарный искусственный спутник Земли (ИСЗ) виден под малыми углами места, что приводит к затенению спутника местными предметами, увеличению шумов антенной системы, создаваемых радиошумовым излучением Земли. Углы места также уменьшаются при удалении по долготе точки приема от долготы ИСЗ.
Для обслуживания северного полушария используют ИСЗ, находящиеся на высокоэллиптической орбите. Наиболее широкое применение нашла высокоэллиптическая орбита типа "Молния" с углом наклона орбиты 63,4°, высотой перигея 500 км, апогея 40000 км.

Существующие ССС и вещания работают в диапазоне частот от 0,235 до 375 ГГц. Выбор рабочего диапазона частот ССС производится на основании требований Регламента радиосвязи. При этом необходимо учитывать особенности эксплуатации системы и ее энергетические характеристики.