

Будівельна механіка в прикладах і задачах
Спеціальність – 0921 – “Будівництво”
Тема: Визначення переміщень
Лекція №4. Розрахунок переміщень в статично визначених системах від сталих навантажень. Мета і задачі:
Метою теми є вміння визначати деформований стан в каркасних будівельних конструкціях – рамах.
Для досягнення мети необхідно вирішення наступних задач:
1. Провести кінематичний аналіз споруди, розділивши раму на основні та другорядні елементи.
2. Визначити опорні реакції і побудувати епюри M,Q,N, починаючи з другорядних елементів. Перевірити епюри.
3. Вибрати одиничний стан в заданій системі.
4. Побудувати епюри згинальних моментів від одиничних навантажень в заданій системі.
5. Визначити шукане переміщення.
4.1 Розрахунок переміщень в статично визначених системах від сталих навантажень
В якості прикладу розрахунку визначені переміщення для розрахункових схем рам на рис. 4.1, де вказано розміри та навантаження.
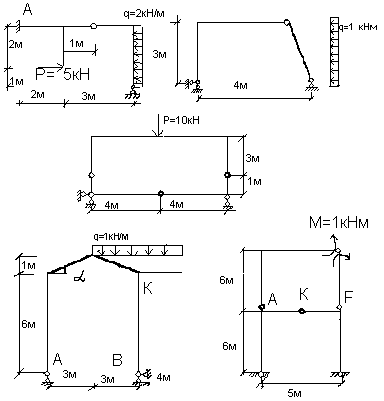
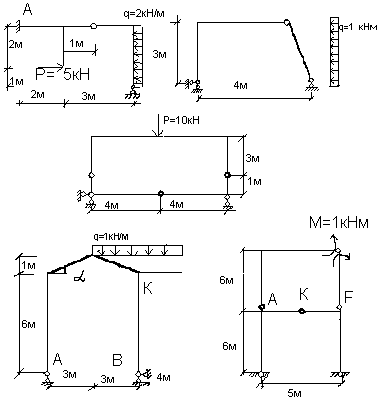
Рисунок 4.1 – Розрахункові схеми споруд
Необхідною умовою кінематичного аналізусистеми є перевірка її за формулою П. Л. Чебишева:
W= 3D-2Ш-С0; (4.1)
де D– ступінь вільності споруди;
Ш – кількість одиночних шарнірів, одиночний шарнір з’єднує два стержні;
С0 – кількість опорних стержнів системи.
Оскільки задані системи є несучими конструкціями, вони мають бути геометрично незмінними, тобто ступінь вільності споруди Wмає дорівнювати нулю.
W1=3*2-2*1-4=0;W2=3*2-2*1-4=0;
W3=3*3-2*3-3=0;W4=3*1-2*0-3=0;W5=3*4-2*4-4=0.
– Достатньою умовою перевірки геометричної незмінності системи є перевірка її за способом утворення. Складові рами є комбінацією декількох простих рам. Складову раму можна розбити на прості лише одним способом. Для цього необхідно виділити основну раму (раму 1 поверху), до якої приєднується проста рама другого поверху і так далі.
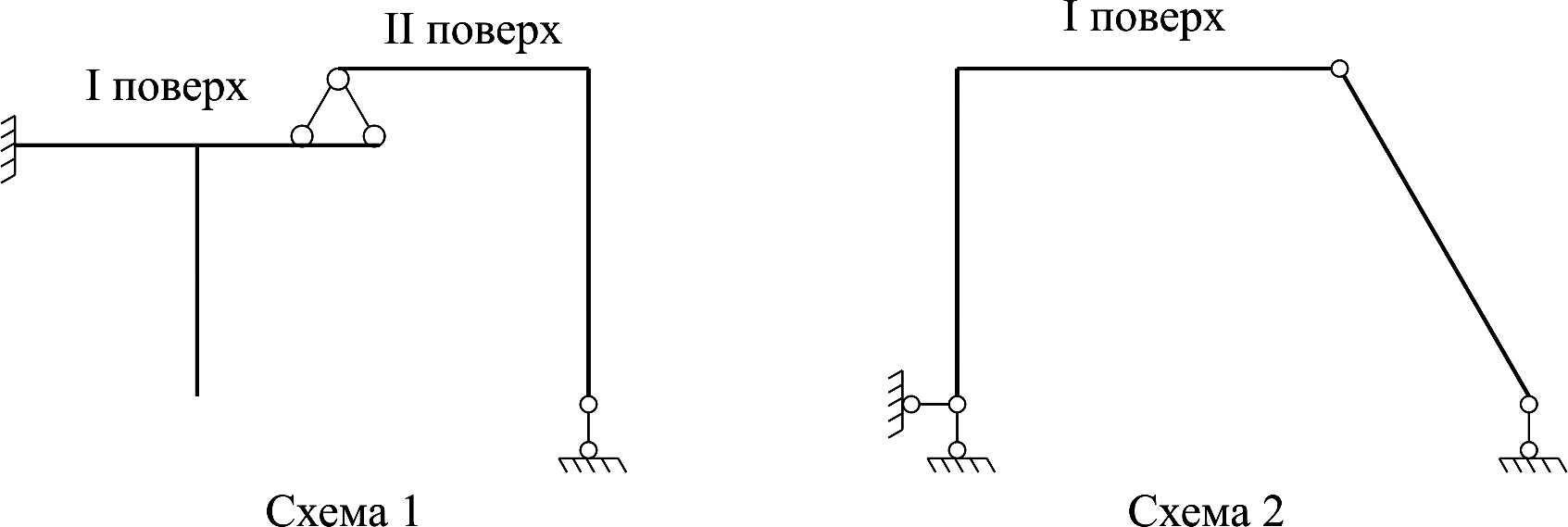
Рисунок 4.2 – Схеми взаємодії (поверхові схеми) для перших двох варіантів
Визначення опорних реакцій в складових рамах розпочинається з простих рам вищого поверху.Записуютьсярівняння рівноваги статики.Знайдені опорні реакції рам вищого поверху прикладаються у вигляді відпору до рам нижнього поверху і при розрахунку рам нижнього поверху розглядаються у вигляді зовнішнього навантаження, рис. 4.3.
Для побудови епюр M,Q,Nпозначаютьхарактерні перерізирам.
Епюри моментівбудуються зі сторони розтягнутого волокна. Згинальний момент в перерізі рами визначається як алгебрична сума моментів всіх сил, розташованих з однієї сторони перерізу.
Опорні реакції в рамах, які мають замкнений контур, визначаються загальним способом запису рівнянь статики:
![]()
![]()
![]() (4.2)
(4.2)

Рисунок 4.3 – Дослідження ступеня геометричної незмінності систем
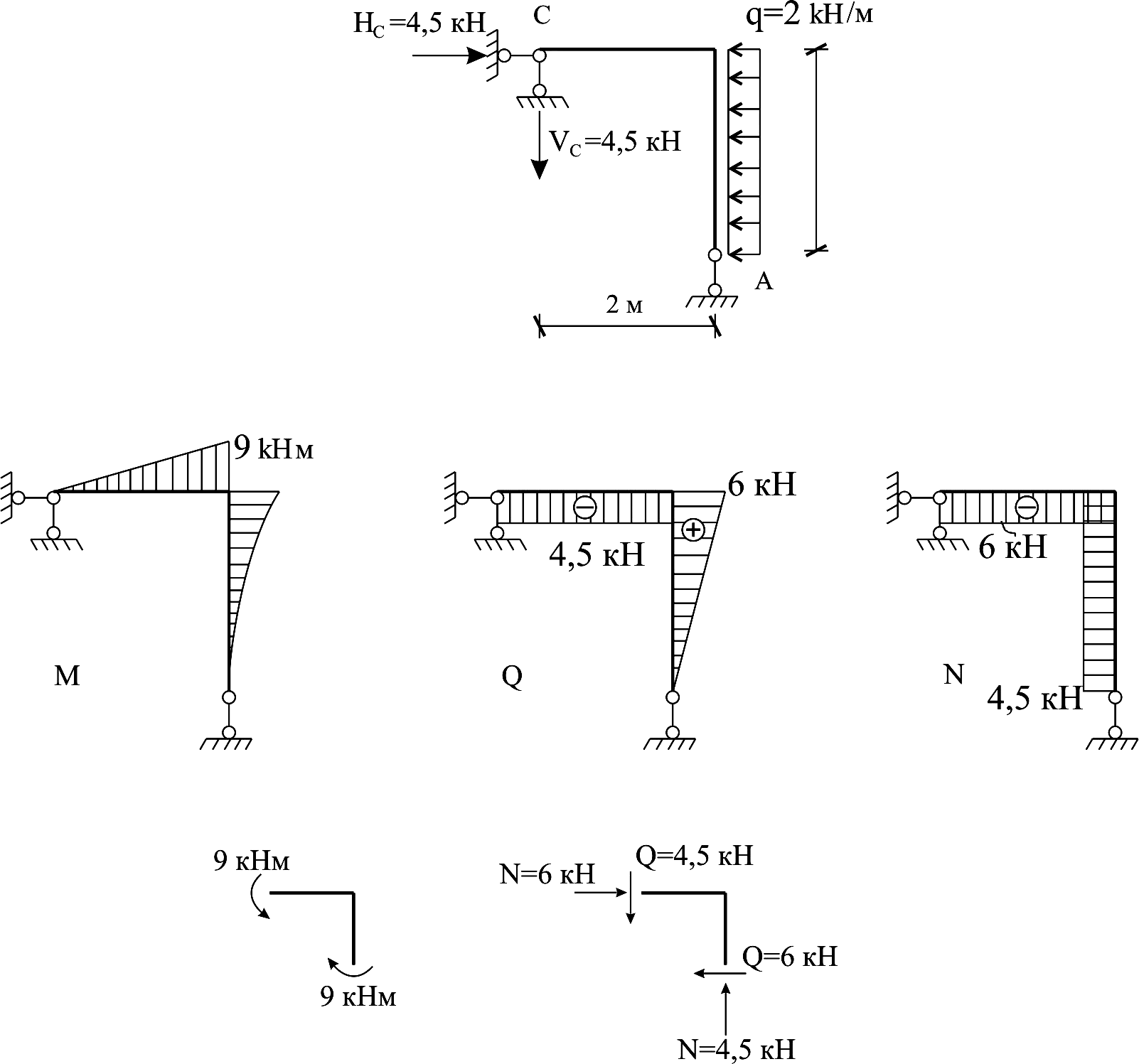
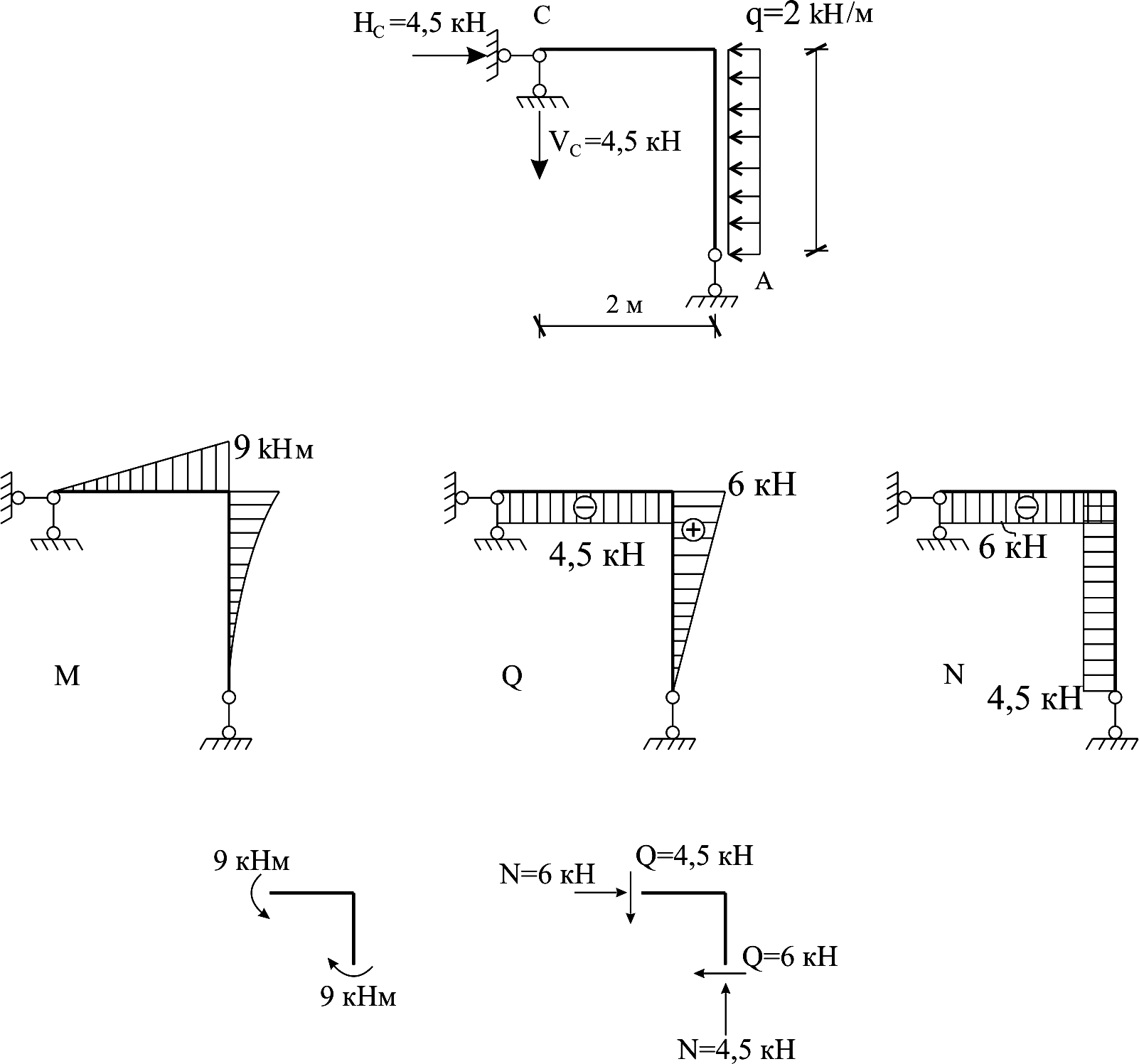
Рисунок 4.4 – Складова рама схеми 1
Розрахунок починається з балочної рами другого поверху, рис. 4.4.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Д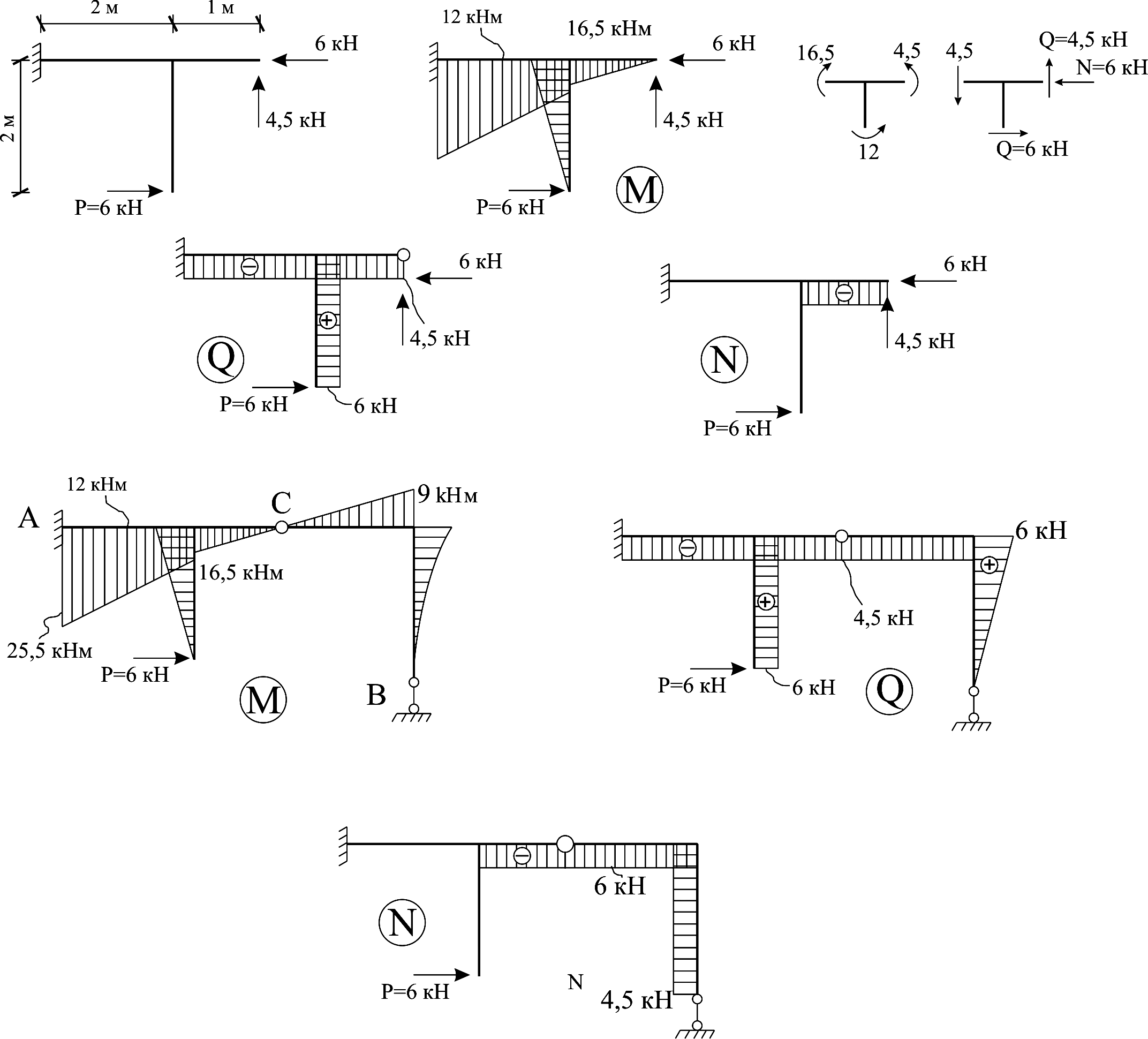 алі
розраховуються консолі рами першого
поверху схеми 1.
алі
розраховуються консолі рами першого
поверху схеми 1.
Р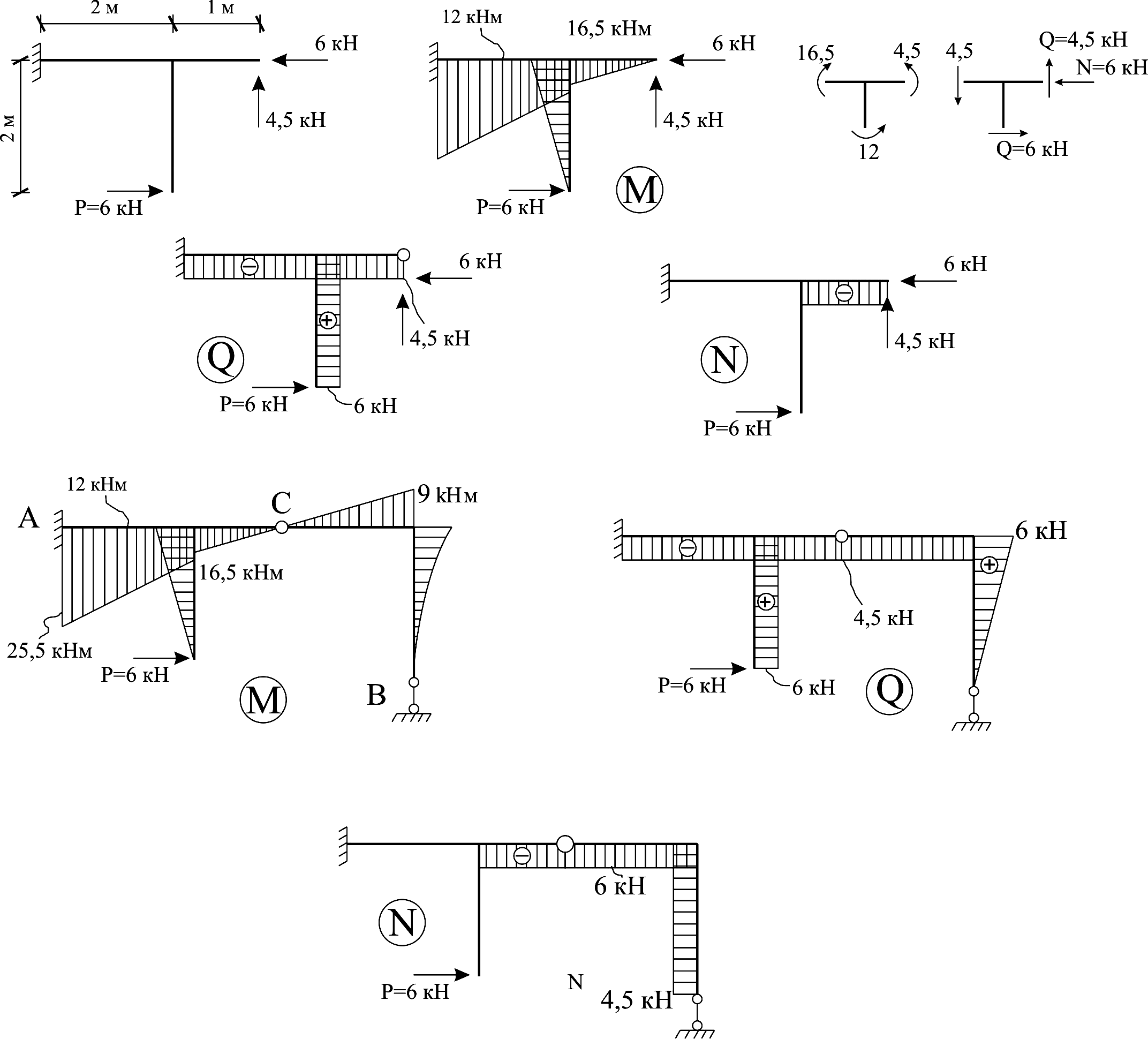 исунок
4.5 – Побудова епюрM,Q,Nв рамі схеми 1
исунок
4.5 – Побудова епюрM,Q,Nв рамі схеми 1

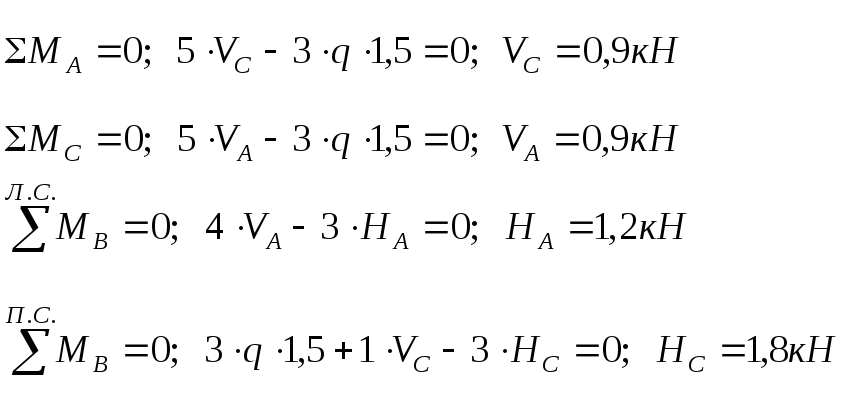
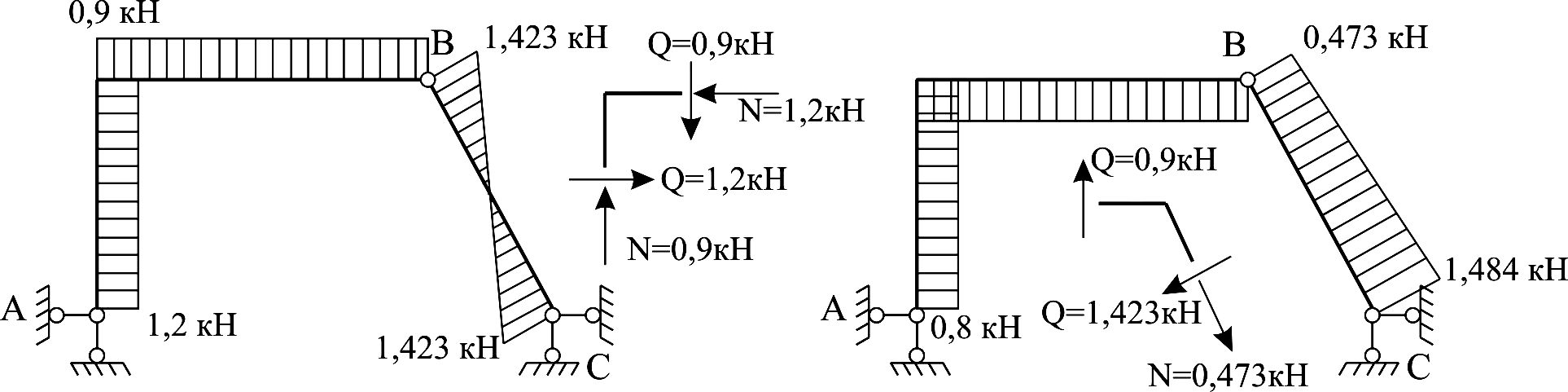
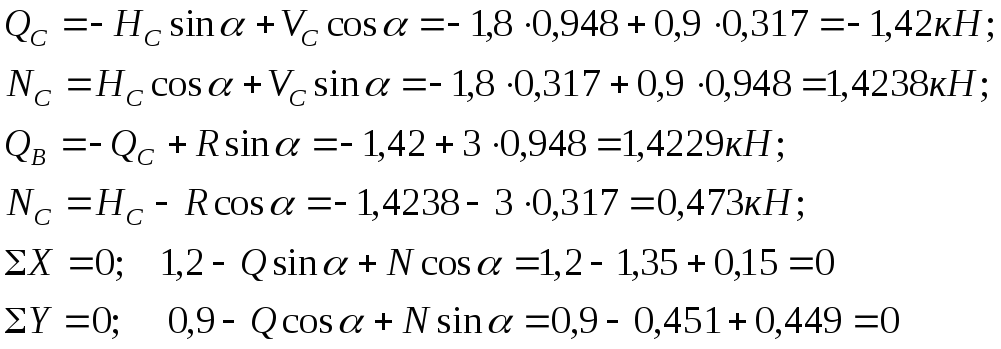
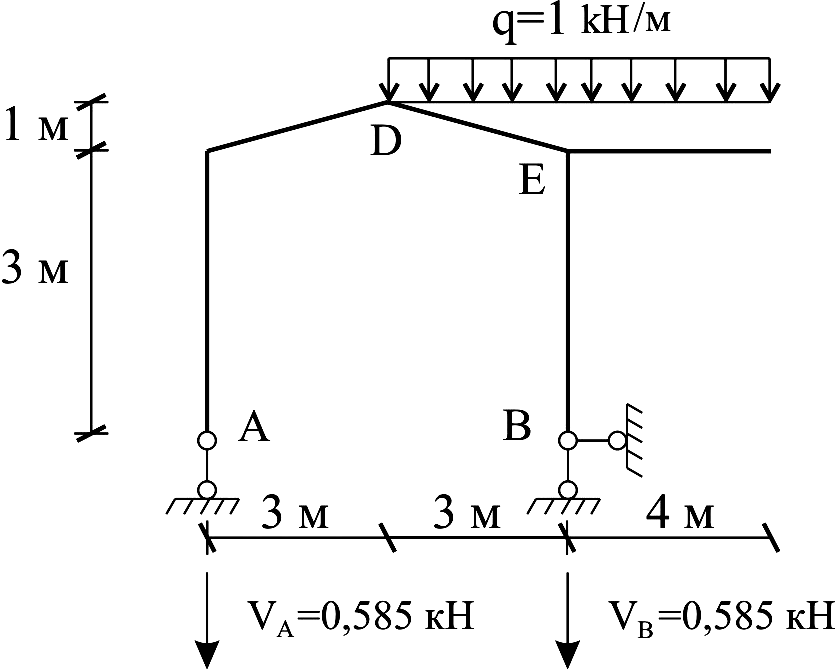
Рисунок 4.6 – Побудова епюр M,Q,Nв простій арочній рамі з нахиленим стержнем (схема 2)
Д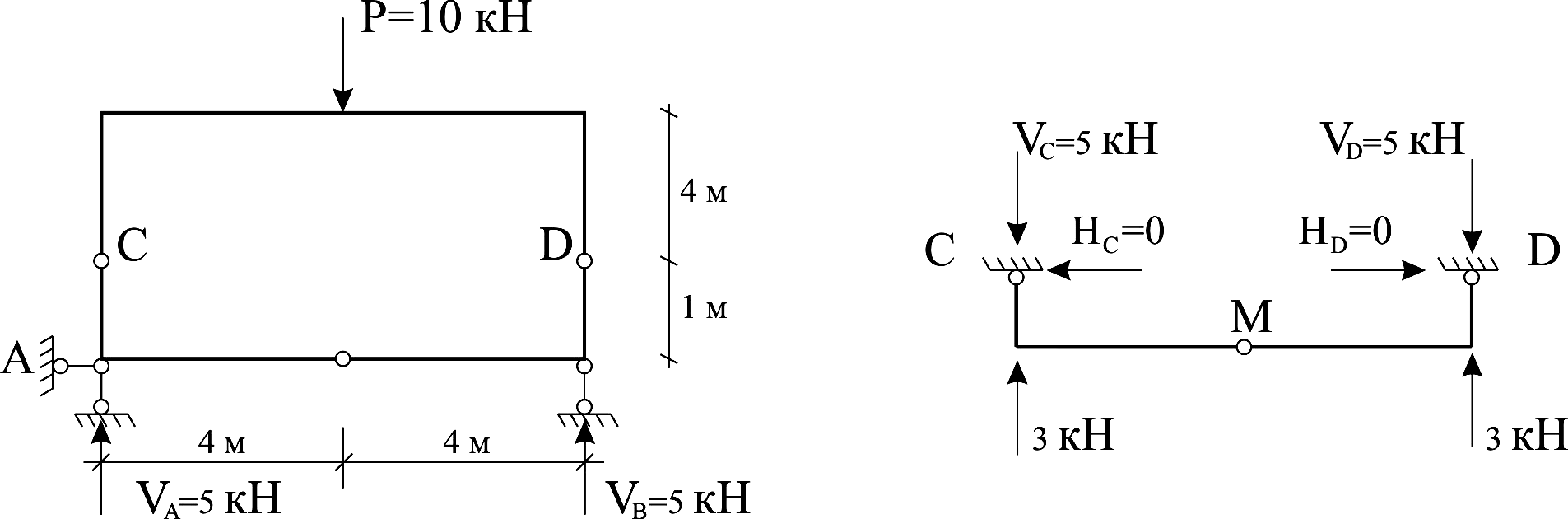 ля
побудови епюр в складовій рамі, що має
вигляд замкненого контура, зручно
розкласти на прості рами. В даному
випадку немає можливості провести
поверхове розділення складової рами,
та для
ля
побудови епюр в складовій рамі, що має
вигляд замкненого контура, зручно
розкласти на прості рами. В даному
випадку немає можливості провести
поверхове розділення складової рами,
та для
зручності
розрахунку першою розраховується арочна
рама АКВ. Опорні реакції
![]() ,
які визначаються із розрахунку цієї
арочної рами, прикладаються в зворотному
напрямку до верхньої рами. Тоді опорні
реакції в верхній рамі будуть уже
відомі, можна проводити розрахунок.
,
які визначаються із розрахунку цієї
арочної рами, прикладаються в зворотному
напрямку до верхньої рами. Тоді опорні
реакції в верхній рамі будуть уже
відомі, можна проводити розрахунок.

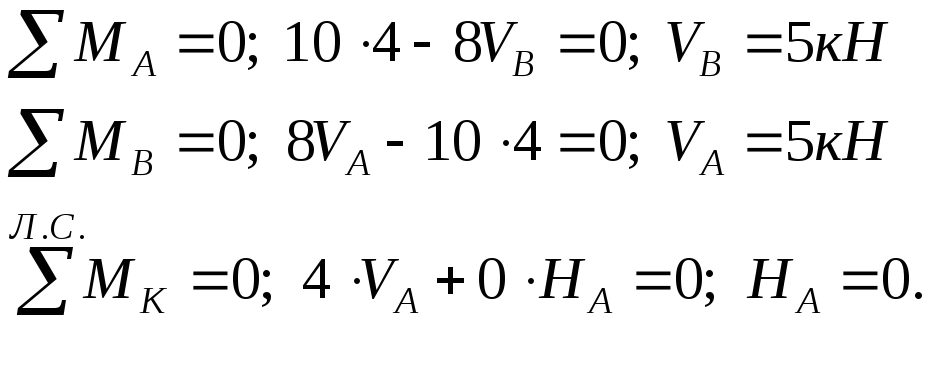

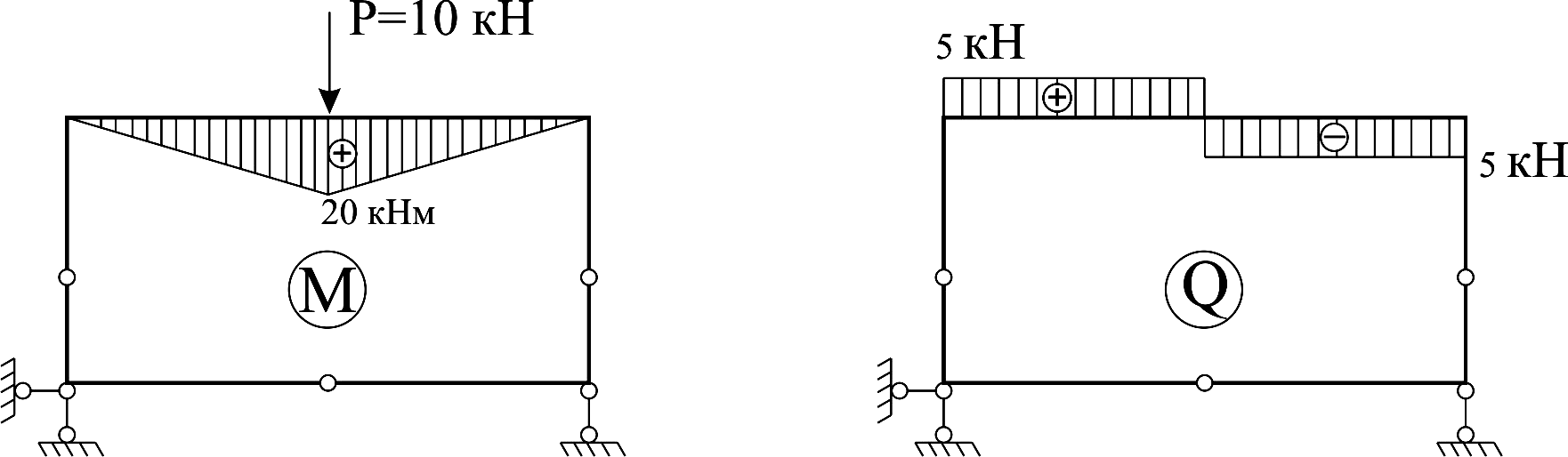
Рисунок 4.7 – Побудова епюр M,Q,Nв складовій рамі, яка має замкнений контур
![]()
![]()
![]()
![]()
![]()
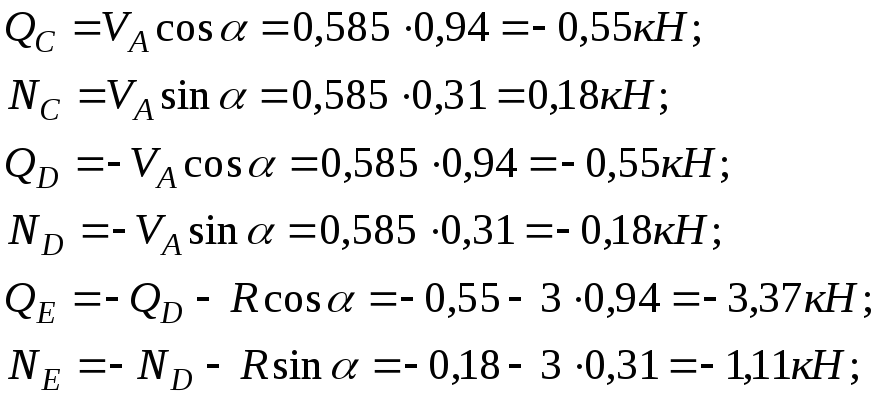
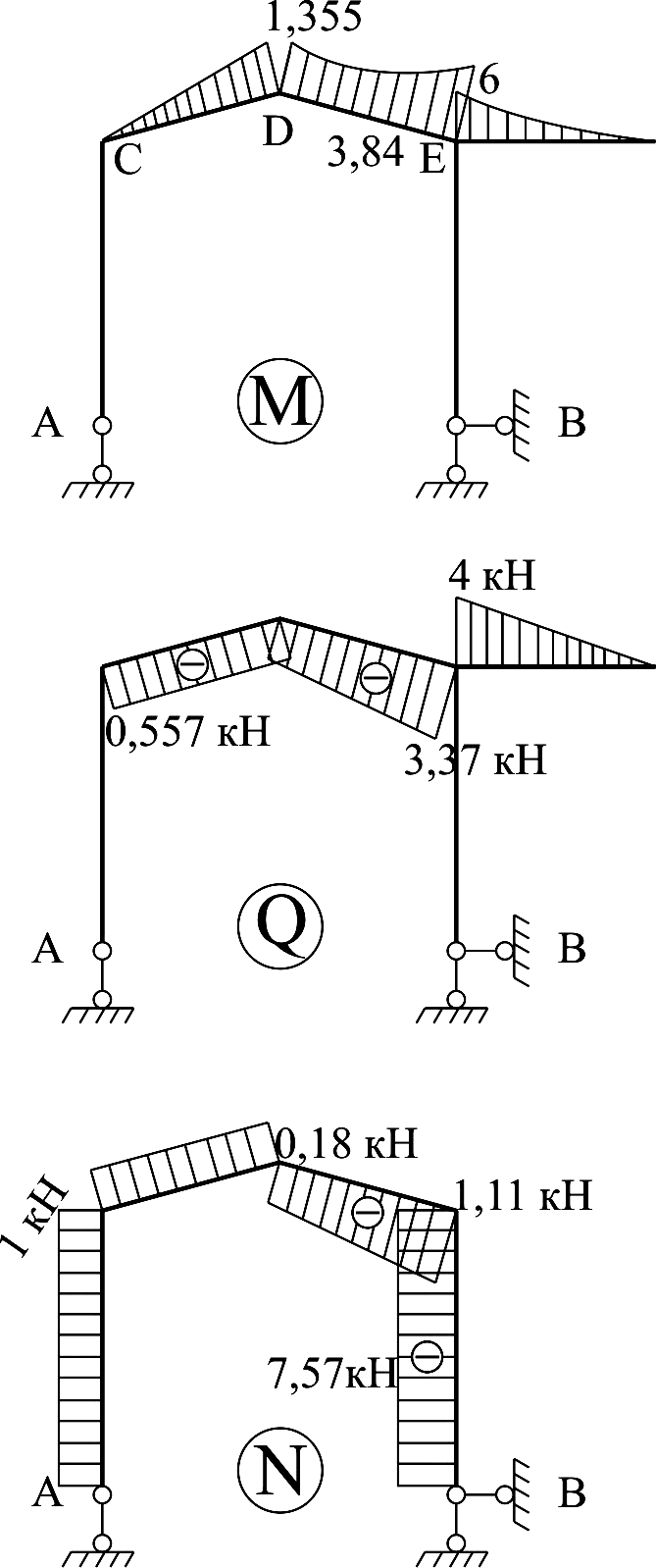

Рисунок 4.8 – Побудова епюр M,Q,Nв простій балочній рамі з нахиленим елементом (схема 4)
Розрахунок арочної рами 1 поверху
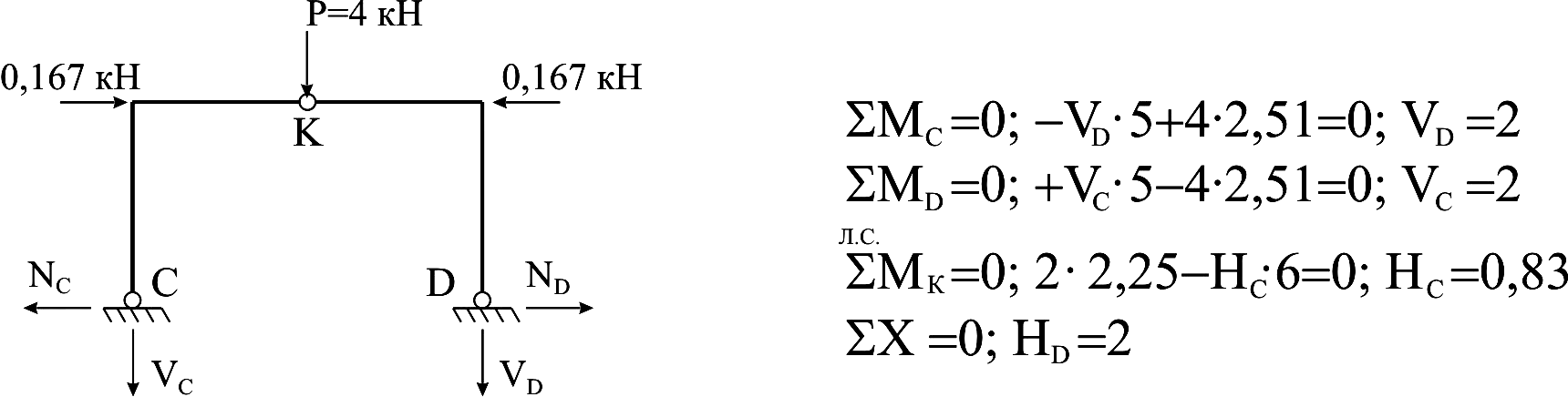
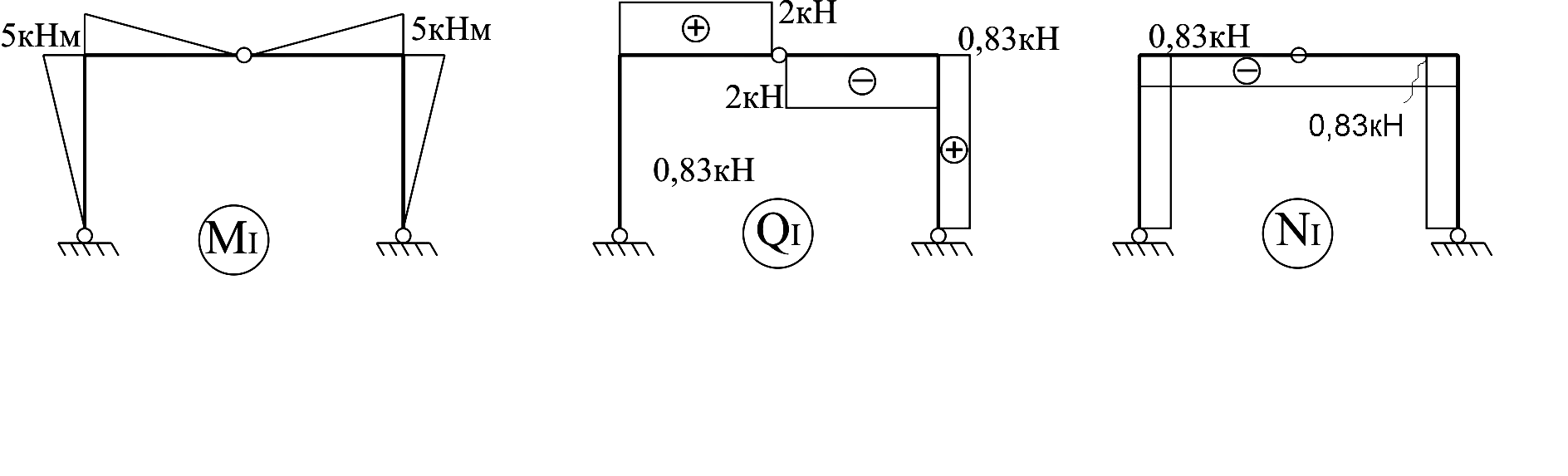
Рисунок 4.9 – Побудова епюр M,Q,Nв другому та першому поверхах
складової рами схеми 5

Рисунок 4.10 – Побудова епюр M,Q,Nв складовій рамі схеми 5
Для визначення шуканого переміщення необхідно вибрати одиничний стан системи. Навантаження одиничного стану має прийматись таким, щоб воноздійснювало роботу на шуканому переміщенні.
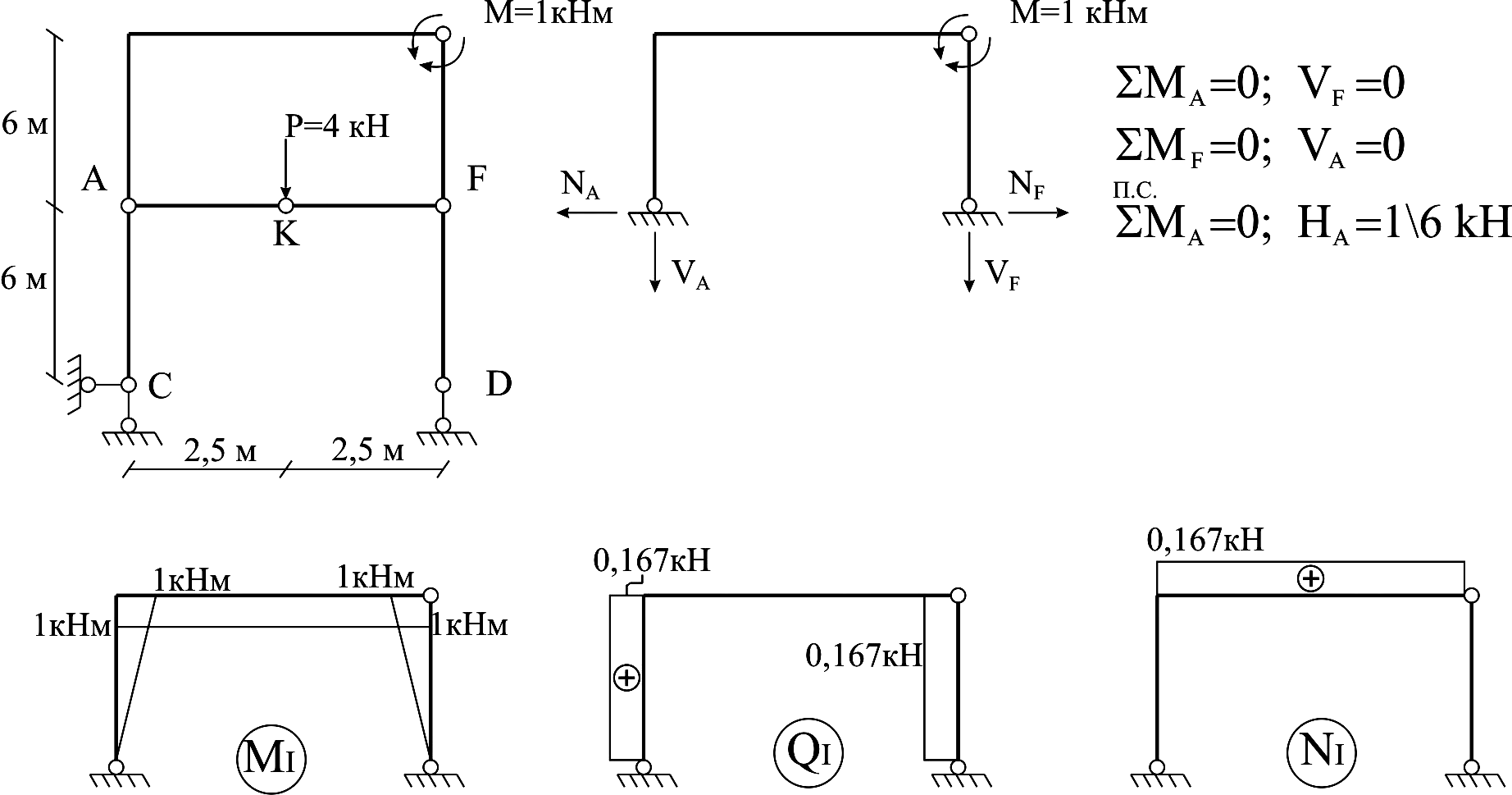
Щоб визначити лінійні зміщення точоксистеми, наприклад, вертикальне зміщення точки Е в схемі 1, в шуканому напрямку прикладається одинична зосереджена сила Р=1(рис. 4.11).

Рисунок 4.11 – Епюра М1 від одиничного навантаження рами силою
Р=1 в точці Е в схемі 1
Для знаходження спільного кута повертанняперетинів А і С в схемі 2 прикладаються два одиничних зосереджених моменти в шуканих точках(рис. 4.12).

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рисунок 4.12 – Епюра М1 від одиничного навантаження точок А і С одиничними моментами в схемі 2
Для визначення кута перелому перетинів в шарнірі(наприклад, в шарнірі С в схемі 3) прикладається пара одиничних зосереджених моментів(рис. 4.13).
Для знаходження кутового переміщення системи, наприклад, кута повертання точки К в схемі 4, до шуканої точки прикладаєтьсяодиничний зосереджений момент М=1(рис. 4.14).
Щоб знайти зближення точок системи, яке знаходиться під дією зовнішніх навантажень, наприклад, зближення точок А і В в схемі 5, достатньо в шуканому напрямку прикласти дві одиничні зосереджені сили (рис. 4.15).