

АЕПТВМ КП / КП_Гаврилов П.Д.,Неверов А.А. Изучение свойств электропривода ПЧ–АД, для разных законов частотн. управл
..pdfФедеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования «Кузбасский государственный технический университет» Кафедра электропривода и автоматизации
ИЗУЧЕНИЕ СВОЙСТВ ЭЛЕКТРОПРИВОДА ПО СИСТЕМЕ «ПЧ – АД», РЕАЛИЗУЮЩЕГО РАЗЛИЧНЫЕ ЗАКОНЫ ЧАСТОТНОГО УПРАВЛЕНИЯ
Методические указания к лабораторной работе по курсам «Теория электропривода» и «Автоматизированный электропривод промышленных установок и технологических комплексов»
для студентов специальности 180400 «Электропривод и автоматика промышленных установок и технологических комплексов»
Составители П. Д. Гаврилов А. А. Неверов
Утверждены на заседании кафедры Протокол № 3 от 2.02.2006
Рекомендованы к печати учебно-методической комиссией по специальности 180400 Протокол № 5 от 2.02.2006
Электронная копия находится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2006
1
ЦЕЛЬ РАБОТЫ: 1. Изучить принцип работы ПЧ с АИН 2. Изучить электромеханические свойства ЭП «ПЧ–
АД» с законами U/f = const; поддержание абсолютного скольжения и COS(ϕ).
3. Изучение возможностей микропроцессорного управления ЭП.
1. Краткие теоретические сведения
Лабораторная работа проводится на основе электропривода переменного тока по системе ПЧ–АД. Он предназначен для реверсивных электроприводов с регулированием выходной частоты от 0 до
60Гц при следующих условиях:
1)диапазон рабочих температур от +1°С до +40 °С;
2)окружающая среда непожароопасная, невзрывоопасная, содержание нетокопроводящей пыли не более 0,5 мг/м3, атмосфера промышленных предприятий;
3)оболочка шкафов электроприводов обеспечивает степень за-
щиты IP21;
4)показатели качества электроэнергии для питания электроприводов следующие:
- отклонения напряжения сети переменного тока от номинального значения +10 %, –15 %;
- отклонения частоты сети переменного тока от номинальной в
пределах ± 2%; 5) верхнее значение относительной влажности окружающей
среды 80 % при температуре 25 °С, высота над уровнем моря до 1000 м. Данный электропривод обеспечивает:
− регулирование выходного напряжения до номинального значения, но не выше напряжения питающей сети в функции частоты по
закону: Uf = const = 4,0 ÷7,6 при fном= 50 Гц, где U – действующее значение выходного напряжения; f – выходная частота;
−работу с током 1,5 Iн в течение 120–180 с;
−пуск, торможение, реверс электродвигателя;
−работу с номинальным током на нагрузку, имеющую коэффициент сдвига 0,15÷0,9 при fном= 50 Гц.
2
Электропривод состоит из преобразователя частоты, электродвигателя переменного тока и аппаратуры защиты от аварийных режимов. Преобразователь частоты питается трехфазным напряжением переменного тока частотой 50 Гц и напряжением 380 В, которое подается на преобразователь с помощью автоматического выключателя QF. Управление частотой вращения двигателя и его реверс производится с помощью регулировок, выведенных на лицевую панель преобразователя частоты.
1.1.Устройство и принцип работы электропривода
иего составных частей
Вкачестве сетевого преобразователя взят преобразователь частоты из промышленного электропривода серии ЭКТ-2. На данном
преобразователе реализован закон частотного управления: Uf = const ,
где U – выходное напряжение, f – выходная частота.
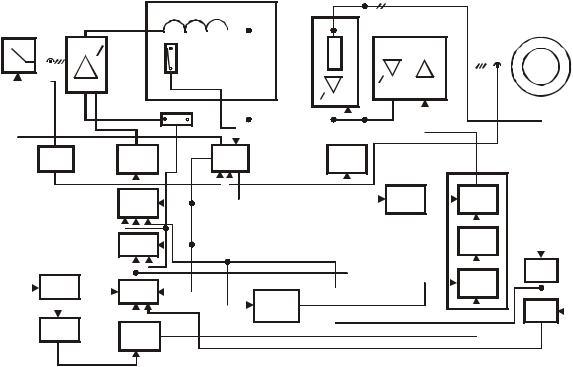
Для электропривода выполнена система САР по принципу подчиненного регулирования, внутренний контур – это контур регулирования входного тока преобразователя, внешний контур – контур регулирования ЭДС двигателя. Структурная схема преобразователя приведена на рис. 1.1.
Силовая схема электропривода предназначена для преобразования переменного напряжения питающей сети в переменное напряжение регулируемой частоты и амплитуды. Все команды на включение и отключение выключателя (QF) формируются с помощью системы защиты и сигнализации. Силовой управляемый выпрямитель (УВ) с системой фазоимпульсного управления (СУВ) осуществляет амплитудное регулирование величины выходного напряжения. Выпрямитель выполнен по трехфазной мостовой схеме. Система управления инвертором (СУИ) осуществляет управление частотой выходного напряжения электропривода. Система авторегулирования (САР) обеспечивает плавное регулирование скорости асинхронным двигателем, а также разгон, торможение и реверс асинхронного двигателя.
Для согласования входа инвертора с выходом выпрямителя между ними включен LC-фильтр Ф с узлом силового токоограничения и разрядным устройством. Фильтр сглаживает пульсации выпрямлен-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
QF1 УВ |
|
|
|
|
L |
|
|
|
|
|
|
|
|
Ф |
УТУ |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
АИН |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ш |
ДСИ С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
ДТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
СУВ |
|
СЗС |
|
|
УТ |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СТ |
|
|
ФИ |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
РТ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КР |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
РТ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Uзад УР Iогр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДН |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
РЭ |
|
|
|
|
|
|
|
|
|
УДР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЗГ |
|
Id |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДЭ |
||||
|
|
|
ЗИ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
УО |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
ного тока и напряжения, а также потребляет реактивную составляющую мощности нагрузки.
Рис. 1.1. Структурная схема преобразователя частоты
Условное обозначение узлов структурной схемы
QF – силовой выключатель авто- |
СУИ – система управления ин- |
матический (пускатель); |
|
АИН – автономный инвертор на- |
вертором; |
пряжения; |
СЗС – система защиты и сигнали- |
ДТ – датчик входного тока; |
зации; |
ДН – датчик напряжения; |
УТУ – узел динамического тор- |
ДЭ – датчик ЭДС; |
можения; |
ДСИ – датчик срыва инвертора; |
УВ – управляемый выпрямитель; |
ЗИ – задатчик интенсивности; |
УР – устройство реверса; |
ЗГ – задающий генератор; |
УО – усилитель-ограничитель; |
КР – кольцевой распределитель; |
УТ – устройство управления тор- |
М – нагрузка; |
можением; |
РТ1, РТ2 – регуляторы тока; |
УДР – устройство двухзонного |
РЭ – регулятор ЭДС; |
регулирования; |
СТ – узел силового токоограни- |
Ф – силовой LC-фильтр; |
чения; |
ФИ – формирователь импульсов; |
СУВ – система управления вы- |
Ш – шунт. |
4
прямителем;
Регулирующая часть обеспечивает:
-формирование входного сигнала задания управления;
-регулирование темпа изменения задания частоты, 0,5–60 с;
-изменение выходного напряжения электропривода до номинального значения в функции частоты;
-поддержание выходного напряжения постоянным по величине на частотах выше номинальной.
1.2.Силовая часть преобразователя частоты
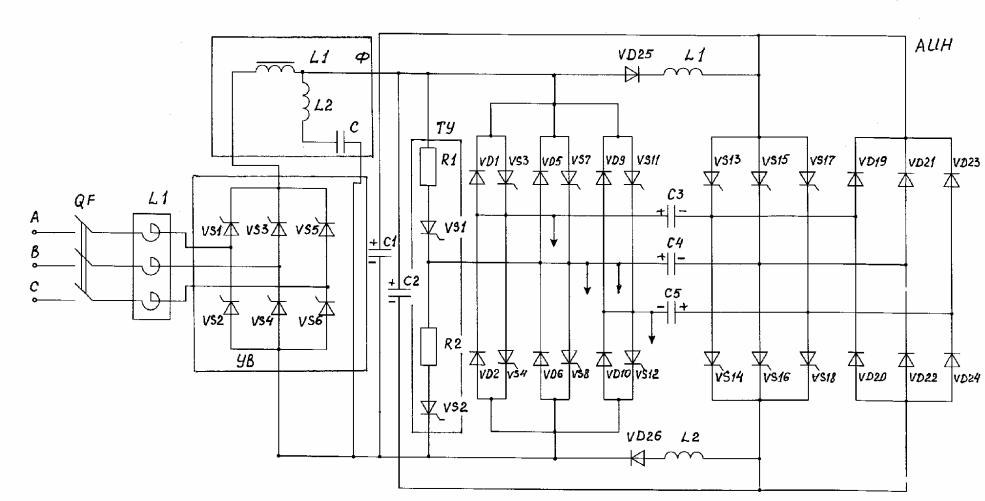
В электроприводе использован автономный инвертор напряжения (АИН) с пофазной коммутацией. Упрощенная схема АИН представлена на рис. 1.2. Элементы схемы необходимо рассматривать как следующие функциональные группы:
1)мост основных тиристоров (VS3, VS4, VS7, VS8, VS11,
VS12);
2)мост коммутирующих тиристоров (VS13–VS18);
3)мост обратных диодов (VD1, VD2, VD5, VD6, VD9, VD10);
4)коммутирующие конденсаторы (С3, С4, С5);
5)коммутирующие дроссели (L1, L2);
6)разделительные диоды (VD25, VD26);
7)мост сброса энергии (VD19–VD24);
8)вспомогательные источники подзаряда Uп1, Uп2. Вспомогательные источники подзаряда Uп1 и Uп2 обеспечивают
автоматический непрерывный дозаряд коммутирующего конденсатора в течение процесса коммутации, что обусловливает постоянство коммутационной способности АИН во всех режимах его работы.
Разделительные диоды VD25, VD26 служат для развязки основного источника питания (УВ) от вспомогательных источников подзаряда.
Цепь сброса энергии (VD19–VD24) служит для обеспечения стабилизации напряжения на коммутирующих конденсаторах, поддерживая его на уровне, не превышающем величины напряжения на источниках подзаряда.
5
Рис. 1.2. Силовая схема электропривода

Работа одной фазы АИН происходит в следующей последовательности.
Предположим, что работают основные тиристоры VS3, VS7, VS12.
Коммутирующий конденсатор С3 заряжен полярностью, указанной на рис. 2.1. Ток нагрузки протекает по цепи: VS3 – VS7 – фазы двигателя нагрузки – VS12. Затем отпирается коммутирующий тиристор VS13 для коммутации тока в VS3. Амплитуда импульса разрядного тока (тока коммутации) через С3, VS3 (VD1), VD25, L1, VS13 превосходит ток нагрузки Iн, вследствие чего ток через VS3 спадет до нуля.
После этого избыток тока коммутации Ik, на который он превышает ток нагрузки Iн, направляется в обратный диод VD1. Достигнув максимального значения, Ik начинает уменьшаться, создавая заряд обратной полярности на конденсаторе С3. В течение времени, когда VD1 проводит ток, прямое падение напряжения в цепи VD1, являясь обратным для тиристора VS3, запирает его.
Время приложения обратного напряжения к запираемому тиристору определяется величиной емкости конденсатора С3, индуктивностью L1 и током нагрузки. На холостом ходе АИН время приложения обратного напряжения (t) определяется выражением
t = π LC ,
LC ,
где L – индуктивность коммутирующего дросселя L1; С – емкость коммутирующего конденсатора С3.
После окончания перезаряда конденсатора С3 включается тиристор VS4, и конденсатор С3 дозаряжается до первоначального напряжения, но с обратной полярностью, от источника подзаряда по цепи Uп1 – VS13 – C3 – VS4 – Uп1. К тиристору VS3 вновь приложено прямое напряжение.
К коммутирующему тиристору VS13 прикладывается обратное напряжение реактора L1 при коммутации в другой фазе, и он запирается. Конденсатор С3 подготовлен для запирания тиристора VS4, осуществляемого в конце его проводящего полупериода отпиранием
VS14.
Защита тиристоров силовой схемы от перенапряжений осуществляется RCD-цепями.
Для обеспечения режима торможения используется тормозное устройство (ТУ), состоящее из двух цепей (последовательно вклю-
7
ченный тиристор и резистор), средней точкой подключенных к общей точке тиристоров фазы В АИН.
Включение тормозного устройства задается сигналом регулятора ЭДС (РЭ). Отрицательный сигнал регулятора является сигналом на торможение привода.
2.Реализация законов частотного управления
вэлектроприводе по системе ПЧ – АД
Общие принципы реализации законов частотного управления основывается на нескольких базовых концепциях:
1)дискретная обработка сигнала – для быстродействия схемы;
2)использование в качестве измерительного параметра абсолютного скольжения для быстроты реагирования схемы на резкое изменение скорости вследствие резкого приложения нагрузки;
3)возможность работы схемы в широком диапазоне частот вра-
щения.
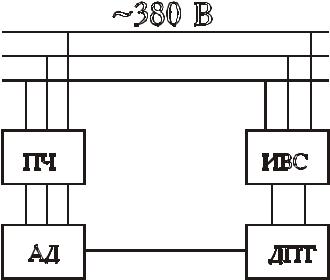
Структурная схема стенда представлена на рис. 2.1.
Рис. 2.1. Структурная схема стенда:
ПЧ – преобразователь частоты; АД – асинхронный двигатель; ИВС – инвертор, ведомый сетью; ДПТ – двигатель постоянного тока
2.1. Закон поддержания абсолютного скольжения
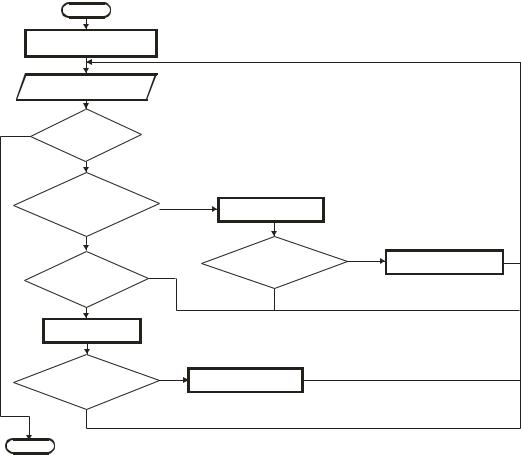
Алгоритм поддержания абсолютного скольжения постоянным представлен на рис. 2.2.
|
8 |
|
|
Начало |
|
|
|
Запоминание текущих |
|
|
|
значений S и Wр |
|
|
|
Считывание датчика |
|
|
|
скорости вращения |
|
|
|
Да Остановка |
|
|
|
программы |
|
|
|
Нет |
|
|
|
Фактическое |
Да |
|
|
значение |
|
|
|
Снижаем ω0 |
|
|
|
S>Sзад |
|
|
|
Нет |
|
Да |
|
Нет |
ωр.зад . - ωр.факт. >Δωдоп. |
Увеличиваем Sзад. |
|
Фактическое |
|
|
|
значение |
|
|
|
S<Sзад |
Нет |
|
|
Да |
|
|
|
|
|
|
|
Увеличиваем ω0 |
|
|
|
ωр.факт. - ωр.зад. >Δωдоп. |
Да |
|
|
Уменьшаем Sзад. |
|
|
|
Нет |
|
|
|
Конец |
|
|
|
Рис. 2.2. Алгоритм поддержания абсолютного |
|||
скольжения постоянным |
|
||
Реализация закона поддержания постоянства абсолютного скольжения сводится к измерению скорости вращения двигателя и расчета рабочего скольжения и сравнения его с заданным значением. При превышении фактического значения от заданного происходит уменьшении ω0 , при уменьшении фактического значения скольже-
ния от заданного происходит увеличение ω0 . При превышении
отклонения скорости вращения предельного значения от заданной скорости происходит переход на другое скольжение двигателя, то есть на другой участок рабочей характеристики. Таким образом, в заданном диапазоне изменения скорости получаем абсолютно мягкую механическую характеристику.
2.1.1. Принципиальная электрическая схема генератора синусоидальных колебаний
Инвертор, ведомый сетью, создает резкопеременную нагрузку на валу асинхронного двигателя. Это достигается за счет введения в
систему управления инвертором генератора синусоидальных колеба-
9
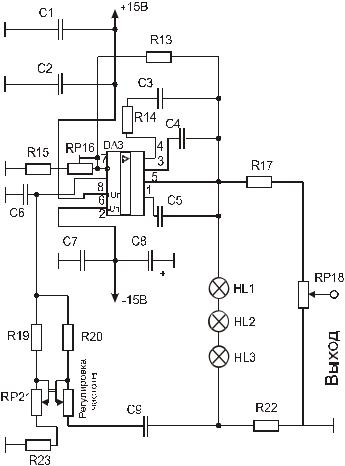
ний с частотой колебания 1 Гц, соответственно нагрузка на валу асинхронного электродвигателя будет изменяться от минимального своего значения до максимального с частотой 1 Гц. Принципиальная электрическая схема генератора синусоидальных колебаний приведена на рис. 2.3.
Рис. 2.3. Принципиальная электрическая схема генератора синусоидальных колебаний
Выход генератора подключается к блоку задания вместо задающего резистора RP13 через переключающий контакт SA2, расположенный на лицевой панели инверторного устройства. Также при этом необходимо подать напряжение питания на генератор с помощью выключателя SA3. Генератор выполнен на операционном усилителе. Цепь отрицательной обратной связи образована резисторами R15, R13, R16, а положительная – мостом Вина (резисторы R23, R19, R20 и конденсаторы С9, С6). Резистор R14 совместно с конденсаторами С3–С5 корректирует частотную характеристику операционного усилителя и устраняет самовозбуждение на высоких частотах. Резистор R15 предназначен для выравнивания амплитуды синусоидального