

Задача.
Для вращения вала перистальтического насоса рассчитать одноступенчатый зубчатый механизм с цилиндрическими зубчатыми колесами.
В таблице 1 заданы момент Твых на выходном валу механизма (момент сопротивления) и частота вращения nвых выходного вала зубчатого механизма, а также передаточное отношение i механизма.
Требуется
выполнить расчет геометрических
параметров (d,
hа,
hf,
h,
dа,
df,
b,
а)
шестерни
и ведомого колеса, определить крутящие
моменты на всех валах,
окружную силу Ft
в зацеплении, коэффициент полезного
действия
 зубчатого
зацепления, мощность Рдв
и частоту вращения nдв
электродвигателя. Уточнить
тип зубчатой передачи (прямозубая или
косозубая) по величине окружной
скорости v
в зубчатом зацеплении.
зубчатого
зацепления, мощность Рдв
и частоту вращения nдв
электродвигателя. Уточнить
тип зубчатой передачи (прямозубая или
косозубая) по величине окружной
скорости v
в зубчатом зацеплении.
Таблица 1. Исходные данные
|
Момент Твых, Н*м |
Частота
вращения nвых, |
Передаточное отношение i |
|
0.3 |
175 |
7.31 |

Решение
Рассчитываемый механизм служит для уменьшения скорости вращения электродвигателя в i число раз и состоит из пары находящихся в зацеплении цилиндрических зубчатых колес (шестерни и колеса). Зубчатые колеса устанавливаются на валах, которые поддерживаются в требуемом положении опорами. Каждый вал имеет две опоры (скольжения или качения), закрепленные в корпусе. Быстроходный вал редуктора соединен с валом электродвигателя муфтой. В качестве опор принимаем подшипники качения.
Ориентировочно определяем требуемую мощность Рдв электродвигателя, приняв предварительно значения КПД:
КПД
зубчатой передачи -
 ;
;
КПД
подшипника качения -
 = 0,99;
= 0,99;
КПД
муфты -
 = 0,97.
= 0,97.
Тогда
Рдв
= кРвых/
 [Вт],
(1)
[Вт],
(1)
где к - коэффициент запаса, учитывающий необходимость преодоления динамических нагрузок в момент разгона, принимаемый равным 1,05 ... 1,1;
Р
вых =
Твых* - требуемая мощность на выходном валу;
- требуемая мощность на выходном валу;
 = 2
= 2 /60
- угловая
скорость выходного вала, рад/с;
/60
- угловая
скорость выходного вала, рад/с;
nвых - угловая скорость выходного вала в об/мин; Твых- момент на выходном валу, Н*м; л - коэффициент полезного действия электромеханического привода для выбранной схемы он равен

Скорость вращения выходного вала в рад/с равна
 18,31
рад/с.
18,31
рад/с.
Подставив
значения
 ,Tвых,
,Tвых,
 в выражение (1) и приняв к = 1,1 получим
в выражение (1) и приняв к = 1,1 получим
Рдв=(к*Твых*
 )/
)/ =(1,1*0,3*18,31)/0,8386=7,20 Вт.
=(1,1*0,3*18,31)/0,8386=7,20 Вт.
Частота вращения электродвигателя
nдв = nвых*i = 175*7,31=1279,25 об/мин.
Из серии двигателей, имеющих скорости вращения 1250, 1280, 1300 об/мин выбираем электродвигатель с n = 1280 об/мин.
Выбираем число зубьев z1 шестерни. Так как zmin= 17, а рекомендуемое значение числа зубьев шестерни 18 - 30, принимаем z1 = 22.
Число зубьев зубчатого колеса определяем по формуле
z2 = z1*i = 22*7,31=160,82
Так как колесо должно иметь целое число зубьев, принимаем z2 = 161.
Тогда фактическое передаточное отношение зубчатой передачи
iф = z2/z1 = 161/22 = 7,31.
Относительная погрешность передаточного отношения зубчатой передачи

Диаметр ведущего вала, т.е. вала шестерни, принимают близким по размеру диаметру вала двигателя. Считаем, что dдв> 3 мм.
Выбираем значение модуля m зацепления из стандартного ряда модулей (0,15; 0,2; 0,25; 0,3; 0,4; 0,5; 0,6; 0,8; 1,0; 1,25; ... мм). Применение малых модулей позволяет уменьшить габариты колес или при сохранении габаритов увеличить плавность передачи за счет увеличения числа зубьев. Принимаем m = 0,5, чтобы выполнялось условие, при котором диаметр окружности впадин зубьев df шестерни был бы больше диаметра ее ступицы, т.е. df1 > 2dB.
Предполагая прямозубый тип зубчатых колес, определим диаметр делительной окружности колеса (ведомого звена);
d2 = m*z2 = 0,5*161 =80,5 мм.
Линейная скорость зубчатого колеса в зацеплении
v
= d2/2
= (18,31* 80,5)/(2*
d2/2
= (18,31* 80,5)/(2* )
=0,736 м/с.
)
=0,736 м/с.
При линейных скоростях v < 6 м/с принимают тип передачи - прямозубая.
У зубчатых колес со стандартной (нормальной) высотой зуба коэффициент высоты головки зуба ha* = 1, а коэффициент радиального зазора с* зубьев в зацеплении зависит от модуля и равен
с* = 0,5 при m
 0,5 мм;
0,5 мм;
с* = 0,35 при 0,5 <m< 1,0;
с* = 0,25 при m 1,0 мм.
1,0 мм.
Высота головки зубьев колес
ha = ha**m = 1 *0,5 = 0,5 мм.
Высота ножки зубьев колес
hf = m(ha* + с*) = 0,5(1 + 0,5) = 0,75 мм.
Диаметры делительных окружностей зубчатых колес:
шестерни d1 = m*z1 = 0,5*22 =11 мм,
колеса d2 = m*z2 = 0,5*161 =80,5 мм.
Диаметры окружностей вершин зубьев колес:
шестерни dа1= d1 + 2ha = 11 + 2*0,5=12 мм,
колеса dа2 = d2 + 2ha = 80,5 + 2*0,5 = 81,5 мм.
Диаметры окружностей впадин зубьев колес:
шестерни df1 = d1 - 2hf = 11 – 2*0,5 = 10 мм,
колеса df2 = d2 - 2hf = 80,5 – 2*0,5 = 79,5 мм.
Межосевое расстояние а зубчатой передачи
а = (d1 + d2)/2 = (11 + 80,5)/2 = 45,75 мм.
Длина b
зуба определяется по формуле b
=
 ,
где
,
где - коэффициент шириныb
венца колеса по диаметру d
делительной окружности, рекомендуется
принимать
- коэффициент шириныb
венца колеса по диаметру d
делительной окружности, рекомендуется
принимать
 = 0,005 ... 0,3.
= 0,005 ... 0,3.
Длина зуба колеса равна
b2 = 0,05*80,5=4,025мм.
Длина зуба шестерни, как более нагруженного звена, определяется по формуле
b1 = b2 + (0,5 ... 1,0) мм = 4 мм.
Окружное усилие в зацеплении определяется по формуле
Ft= 2Твых/d2 = (2*0.4*103)/80,5 = 9,93 Н.
Уточняем значение КПД зубчатой пары

где f = 0,1 - коэффициент трения стали по стали (шестерня и зубчатое колесо стальные);
 =1,5 - коэффициент
перекрытия пары прямозубых колес;
=1,5 - коэффициент
перекрытия пары прямозубых колес;
с - коэффициент, учитывающий уменьшение КПД зубчатого зацепления при малых нагрузках

Вращающийся момент на ведущем валу зубчатого механизма
Твд=
Твых/(iф* 4)
= 0,4/(7,31*0.99*0.994)
= 0,057 Н*м.
4)
= 0,4/(7,31*0.99*0.994)
= 0,057 Н*м.
Вращающий момент на валу электродвигателя
Тдв=
Твд/ = 0,059/0,97 = 0,055 Н*м.
= 0,059/0,97 = 0,055 Н*м.
Кинематическая схема механизма к задаче приведена на рисунке (2.1).
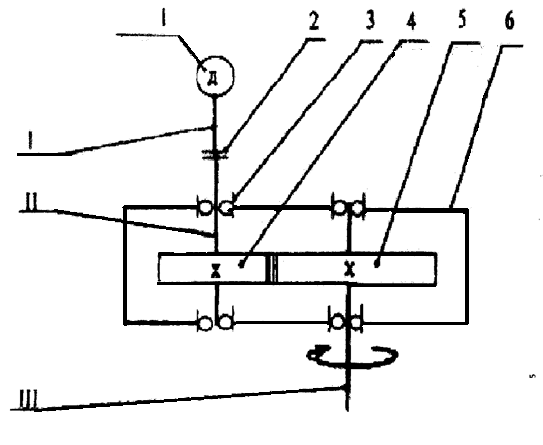
Кинематическая схема механизма: 1 - электродвигатель; 2 - муфта; 3 - опора качения; 4 - шестерня (ведущее зубчатое колесо); 5 - ведомое зубчатое колесо; 6 - корпус; I - вал электродвигателя; II - ведущий вал; III - выходной вал
ЛИТЕРАТУРА
Красковский Е.Я., Дружинин Ю.А., Филатова Е.М. Расчет и конструирование механизмов приборов и вычислительных систем: Учебное пособие. М.: – Высш. шк., 2001. – 480 с.
Сурин В.М. Техническая механика: Учебное пособие. – Мн.: БГУИР, 2004. – 292 с.
Ванторин В.Д. Механизмы приборных и вычислительных систем: Учебное пособие. – М.: Высш. шк., 1999. – 415 с.
Прикладная механика: учеб. Пособие / В.М.Сурин. – 3-е изд., испр. – Минск: «Новое знание», 2008 г
«Детали машин», Д. Н, Решетов, изд. «Машиностроение», Москва, 1989 г.
«Большая советская энциклопедия» Яндекс 2009г «http://slovari.yandex.ru/dict/bse»
Гулиа Н. В., Клоков В. Г., Юрков С. А. Детали машин. — М.: Издательский центр "Академия", 2004. — С. 417. — ISBN 5-7695-1384-5
Анурьев В. И. Справочник конструктора-машиностроителя: В 3 т. / Под ред. И. Н. Жестковой. — 8-е изд., перераб. и доп.. — М.: Машиностроение, 2001. — Т. 2. — 912 с. — ISBN 5-217-02964-1 (5-217-02962-5), ББК 34.42я2, УДК 621.001.66 (035)
Башта Т.М., Руднев С.С., Некрасов Б.Б. и др. Гидравлика, гидромашины и гидроприводы. 2-е изд. — М.: Машиностроение, 1982. — С. 4