

ОЦЕНКА КАЧЕСТВА УПРАВЛЕНИЯ
Показатели качества управления в статическом режиме работы САУ
Различают статический и динамический режимы работы САУ
Встатическом режиме, при котором все внешние воздействия и параметры системы не меняются, качество управления характеризуется статической точностью
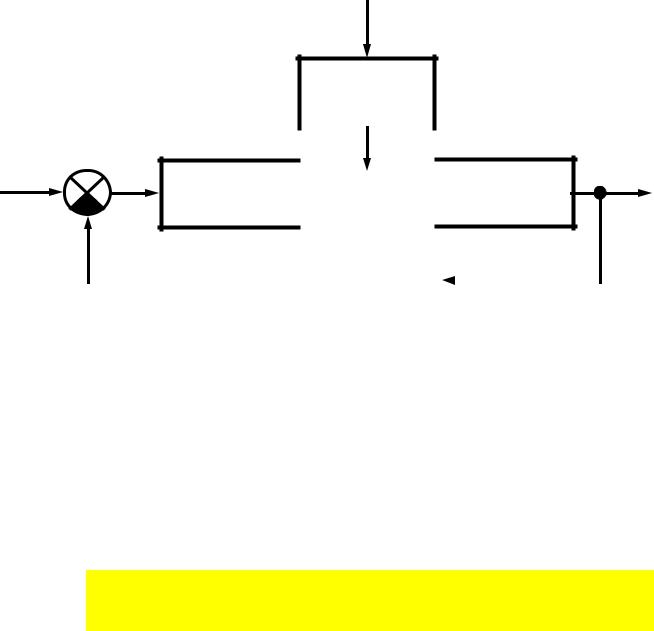
Рассмотрим одноконтурную САУ
f
W3(p)
g |
|
y |
|
W1(p) 

 W2(p)
W2(p)
|
|
Woc(p) |
|
|
|
|
Пусть |
|
|
|
|||
|
|
|
|
|||
f (t) fmax 1(t) |
||||||
g(t) gmax 1(t) |
||||||
Всоответствии с принципом суперпозиции, линейная непрерывная САУ в операторной форме описывается уравнением динамики
Y ( p) G( p) Wзg ( p) F( p) Wзf ( p)

где |
G( p) L g(t) |
gmax |
, F ( p) |
L f (t) |
fmax |
|||||
|
p |
|||||||||
|
|
|
|
p |
|
|
|
|
||
|
Wзg ( p) |
|
W1( p)W2( p) |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
1 W1( p)W2( p)Woc ( p) |
|||||||||
|
Wзf ( p) |
W2 ( p)W3( p) |
|
|
|
|
||||
|
|
|
|
( p)Woc ( p) |
||||||
|
|
1 W1( p)W2 |
||||||||
Теорема о конечном значении оригинала |
||||||||||
|
|
|
lim y(t) lim |
pY ( p) |
||||||
|
|
|
t |
p 0 |
|
|
|
|
||
Поэтому в статическом режиме (при t ) в
уравнении динамики в передаточных функциях и |
|
изображениях нужно принять |
p 0 |

Уравнение динамики превратится в уравнение статики
y(g, f ) g Wзg (0) f Wзf (0)
Рассмотрим пример. Пусть
W1( p) k1 T1 p 1
Woc ( p) koc
тогда
W2 |
( p) |
|
k2 |
W3( p) k3 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
T2 p 1 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
k1 |
|
|
|
k2 |
|
|
|
|
|
||
Wзg ( p) |
|
|
|
T1 p 1 |
T2 p 1 |
|
|
|||||||||||||
|
|
|
|
k1 |
|
k2 |
|
|
|
|
||||||||||
|
|
|
|
1 |
|
|
|
|
|
k |
oc |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
T p 1 |
T p 1 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k1k2 |
|
|
|
|
|
|
|
|
|
|
|||
(T p 1)(T |
|
|
|
p 1) k k |
k |
oc |
|
|
||||||||||||
|
|
1 |
|
2 |
|
|
|
|
|
|
1 2 |
|
|
|
||||||

|
|
|
|
|
|
|
|
|
|
|
|
|
|
k2 |
|
|
|
|
|
k3 |
|
|
|
|
|
|
|
|||
|
|
Wçf ( p) |
|
|
|
|
|
|
|
T2 p |
1 |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
k1 |
|
|
|
|
|
|
|
k2 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
koc |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
T1 p 1 |
|
|
|
|
|
1 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
T2 p |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
k2k3 (T1 p 1) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
(T p 1)(T p 1) k k |
k |
oc |
|
|
|
|
|
||||||||||||||||||||
|
p 0 |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
1 2 |
|
|
|
|
|
|
|||||||||
При |
получим |
|
|
|
|
|
Kp |
|
|
|
|
|
|
|
|
|
|
|
|
|
k2k3 |
|||||||||
|
|
|
|
k k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
W (0) |
|
1 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wçf (0) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
Kp |
|||||||||||
|
|
|
k |
|
k |
|
(1 K |
|
|
) |
|
|
|
|||||||||||||||||
зg |
1 k k |
oc |
|
|
oc |
p |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
1 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Здесь
Kp k1k2koc – коэффициент передачи разомкнутой цепи САУ

Уравнение статики для рассмотренной САУ
|
y(g, f ) g |
Kp |
f |
k |
2 |
k |
3 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
koc (1 Kp ) |
1 Kp |
||||||||||||||||||
Пусть |
g var |
|
|
|
|
, тогда |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
f const 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Kp |
|
|
|
|
|
|
y(g) |
|||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
y(g) g koc (1 Kp ) |
|
gmax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Это уравнение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
регулировочной характеристики |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
САУ |
arctg |
|
Kp |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
koc (1 Kp ) |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
g |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
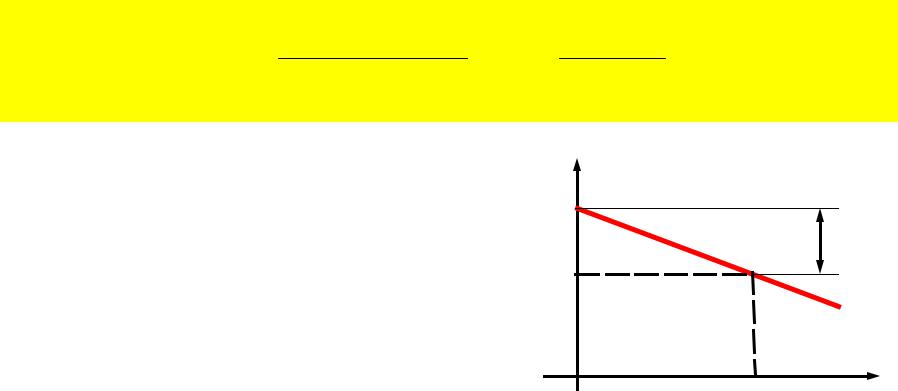
•Регулировочная статическая характеристика САУ определяет изменение значения выходной величины при изменении величины задающего воздействия и при постоянном возмущающем воздействии
Пусть g const gmax
y(g, f ) gmax |
Kp |
|||
|
||||
|
|
koc (1 Kp ) |
||
где |
K f |
k2k3 |
|
|
|
|
|||
1 Kp |
|
|||
– коэффициент передачи замкнутой САУ по
возмущающему воздействию
f var, тогда
f k2k3 |
y f K |
f |
1 Kp |
0 |
|
|
|
|
y(gmax,f) |
y0 |
y |

•Это внешняя статическая характеристика САУ, она определяет изменение значения выходной величины при изменении величины возмущающего воздействия при постоянном задающем воздействии
Величина |
y f k2k3 |
f K f называется |
|
1 Kp |
|
статической ошибкой системы и является основной величиной, определяющей точность САУ
Точность в установившемся режиме чаще всего принято характеризовать статизмом внешней
статической характеристики y
S y0 100
где y0 – значение выходной величины на холостом ходу (при f 0 )
Для полного устранения статической ошибки, согласно
формуле |
k |
k |
|
|
k f |
|
|
|
|||
y f |
2 |
|
3 |
f |
|
1 Kp |
1 Kp |
||||
требуется до бесконечности увеличивать коэффициент передачи , а это, чаще всего, невозможно по условию обеспечения устойчивости системы.
•Системы, в которых нельзя полностью устранить статическую ошибку, называются статическими

Астатические системы
Пусть в системе присутствует интегрирующее звено
W1( p) |
k1 |
|
|
|
W2 ( p) |
|
|
k2 |
W3( p) k3 |
||||||
p |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
T2 p 1 |
|
||||||
Woc ( p) koc |
|
|
|
|
|
|
|
|
|
|
|
|
|||
тогда |
|
|
k1 |
|
|
k2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
k1k2 |
|||||
Wзg ( p) |
|
p |
|
T2 p 1 |
|
|
|
|
|
||||||
|
k1 |
|
|
|
k2 |
koc |
p(T p 1) k k k |
||||||||
|
1 |
p |
T p 1 |
2 |
1 2 oc |
||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wзg (0) k1
oc
|
|
|
|
k2 |
|
k |
|
|
|
|
|
|
|
|
|
||
|
|
|
T p 1 |
|
|
k |
|
k |
|
p |
|
|
|||||
|
|
|
3 |
|
|
2 |
3 |
|
|
||||||||
Wçf ( p) |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
k1 |
|
k2 |
|
|
|
p(T p 1) k k k |
|
|||||||||
1 |
p |
T p 1 |
koc |
2 |
|
|
|
1 2 |
oc |
||||||||
Wçf (0) 0 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Следовательно, статическая ошибка y f Wçf |
(0) 0 |
||||||||||||||||
•Системы, в которых при стремлении возмущающего воздействия к постоянной величине отклонение выходной величины стремится к нулю и не зависит от величины приложенного воздействия, называются
астатическими.