

ЛАБОРАТОРНАЯ РАБОТА № 14
ИССЛЕДОВАНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ ТРЁХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
ЦЕЛЬ РАБОТЫ
1. Освоить методику экспериментального определения механической характеристики исследуемого двигателя.
2. Провести анализ свойств асинхронного двигателя по его механической характеристике.
Основные теоретические положения
Механическая
характеристика асинхронного двигателя
сказывает между собой две основные
механические величины двигателя -
частоту вращения ротора и вращающий
момент, развиваемый на валу
![]() . Вращающий момент асинхронного
двигателя возникает в результате
взаимодействия вращающегося магнитного
поля статора с индуцированным им токам
ротора:
. Вращающий момент асинхронного
двигателя возникает в результате
взаимодействия вращающегося магнитного
поля статора с индуцированным им токам
ротора:
![]() (1)
(1)
где ![]() –
постоянная двигателя, Н м/(Вб А);
–
постоянная двигателя, Н м/(Вб А);
φ– магнитный поток машины, Вб;
![]() – угол сдвига фаз между током
– угол сдвига фаз между током![]() иЭДС
иЭДС
![]() ротора, наведенной
вращающимся
магнитным полем.
ротора, наведенной
вращающимся
магнитным полем.
Входящие в формулу
(1) величины
![]() и
и![]() можно выразить через питающее
напряжение
можно выразить через питающее
напряжение![]() и
параметры двигателя:
и
параметры двигателя:
 (2)
(2)
где ![]() – активное и индуктивное сопротивление
обмотки статора, Ом;
– активное и индуктивное сопротивление
обмотки статора, Ом;
![]() – приведенные к статорной обмотке
активное и индуктивное
сопротивление
обмотки ротора, Ом;
– приведенные к статорной обмотке
активное и индуктивное
сопротивление
обмотки ротора, Ом;
![]() – скольжение;
– скольжение;
![]() – частота. вращения магнитного поля,
об/мин;
– частота. вращения магнитного поля,
об/мин;
р– число пар полюсов магнитного поля машины (р= 2);
f– частота питающей сети, Гц.
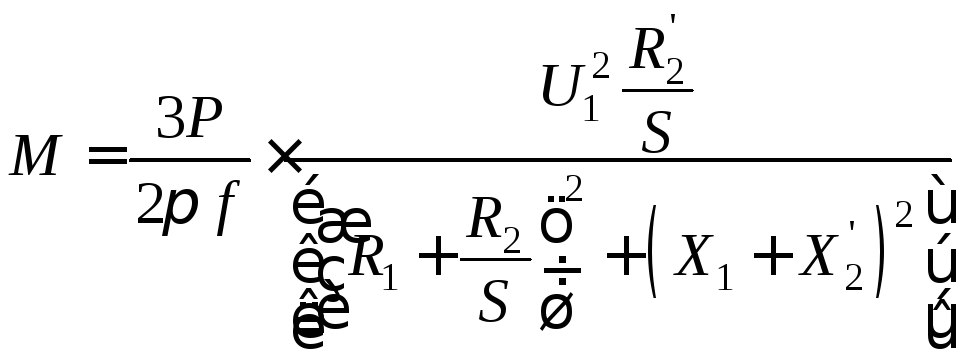
Из соотношения
(2) следует, что при заданном значении
напряжения
![]() вращающий момент двигателя зависит
только от скольженияS, а,
следовательно, от частоты вращения
ротораn, поскольку
вращающий момент двигателя зависит
только от скольженияS, а,
следовательно, от частоты вращения
ротораn, поскольку![]() .Поэтому, задаваясь различными
значениями S в пределах
от нуля до единицы, можно определить
соответствующие им значения момента
двигателя
.Поэтому, задаваясь различными
значениями S в пределах
от нуля до единицы, можно определить
соответствующие им значения момента
двигателя ![]() и построить
и построить
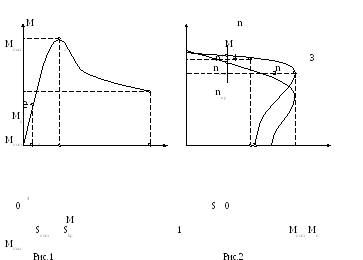 график
график![]() (рис.1, а также график
(рис.1, а также график ![]() называется механической
характеристики
двигателя (рис. 2)
называется механической
характеристики
двигателя (рис. 2)
Механическая
характеристика является основной
характеристикой любого электрического
двигателя, определяющей его эксплуатационные
свойства. Она имеет ряд
характерных точек 1, 2, 3, (рис. 1, 2), которые
отражаются в паспортных данных двигателя.
Величины, соответствующие точкам
1,2,привоцятек в паспортных данных, как
правило, в относительных единицах к
величинам номинального режима (![]() – точка 3). Номинальный режим для каждого
двигателя определяется как режим
длительной работы, при котором двигатель
не перегревается сверх установленной
температуры. Точка
– точка 3). Номинальный режим для каждого
двигателя определяется как режим
длительной работы, при котором двигатель
не перегревается сверх установленной
температуры. Точка![]() определяет пусковой момент:
определяет пусковой момент:![]() ,
развиваемый двигателем в неподвижном
состоянии, т.е. при
,
развиваемый двигателем в неподвижном
состоянии, т.е. при![]() (или
(или![]() .В паспортных ценных указывается
отношение пускового момента к
номинальному, называемое кратностью
пускового момента
.В паспортных ценных указывается
отношение пускового момента к
номинальному, называемое кратностью
пускового момента![]() Для двигателей с короткозамкнутым
ротором
Для двигателей с короткозамкнутым
ротором![]() .
Точка 2 определяет максимальный момент
.
Точка 2 определяет максимальный момент![]() двигателя, развиваемый им при некотором
скольжении
двигателя, развиваемый им при некотором
скольжении![]() ,
называемомкритическим, которому
соответствует частота вращения
,
называемомкритическим, которому
соответствует частота вращения![]() .
.
В паспорте двигателя приводится величина λ, называемая перегрузочной способностью асинхронного двигателя. Она определяется как отношение максимального момента к его номинальной величине
![]() .
(Х)
.
(Х)
Пренебрегая
активным сопротивлением обмотки статора
![]() ,
величины
,
величины ![]() можно определить из соотношения (2),
воспользовавшись условием экстремума
функции
можно определить из соотношения (2),
воспользовавшись условием экстремума
функции![]() :
:
 ;
(Х)
;
(Х)
![]() (3)
(3)
С учётом формул (3) из выражения (2) можно получить известную формулу Клосса
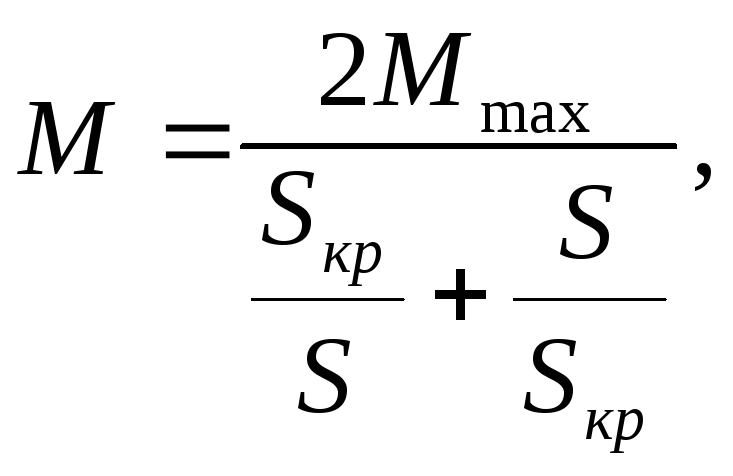 (4)
(4)
которая
широко используется для построения
механической; характеристики асинхронного
двигателя по его паспортным данным
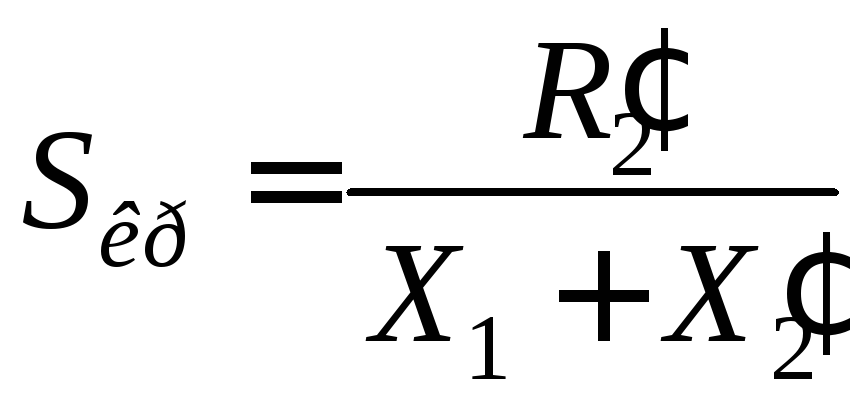
![]() .При этом критическое скольжение
определяют через паспортные данные
следующим образом:
.При этом критическое скольжение
определяют через паспортные данные
следующим образом:
![]() (5)
(5)
Точки 1,2,3 разбивают механическую характеристику на участке с характерными режимами работы двигателя: участок 3-4 – рабочие режимы машины; участок 2-3 – . режимы перегрузок; участок 1-2 - неустойчивые режимы работы двигателя. Совместно участки 3-4 и 2-3 составляют участок устойчивых режимов асинхронного двигателя 2-4.
Рассмотрим
работу машины на участке 2-4, например,
в точке А. В установившемся режиме, т.е.
при равномерном вращении ротора момент
двигателя Ид равен моменту сопротивления
его нагрузки. Пусть теперь
![]() увеличился
до
увеличился
до
![]() . Это вызовет
торможение машины, так как
. Это вызовет
торможение машины, так как
![]() Скорость
начинает уменьшаться, что влечет за
собой, согласно виду механической
характеристики на участке 2-4. увеличение
момента, развиваемого двигателем. Этот
процесс закончится, когда выполнится
равенство
Скорость
начинает уменьшаться, что влечет за
собой, согласно виду механической
характеристики на участке 2-4. увеличение
момента, развиваемого двигателем. Этот
процесс закончится, когда выполнится
равенство
![]() .
Указанное свойство автоматического
установления равновесия между моментом
сопротивлений и преодолевающим его
моментом двигателя, называется свойством
саморегулирования. Оно .характерно
только для устойчивого. режима работы
двигателя.
.
Указанное свойство автоматического
установления равновесия между моментом
сопротивлений и преодолевающим его
моментом двигателя, называется свойством
саморегулирования. Оно .характерно
только для устойчивого. режима работы
двигателя.
Точки
участка 1-2 соответствуют неустойчивому
равновесию
моментов
нагрузки и двигателя, так как при любом
малом снижении скорости, обусловленном
незначительным увеличением момента
сопротивления, вращающий момент не
растет, а
падает, в результате чего, двигатель
останавливается. В связи с этим
максимальный момент
![]() также называют опрокидывающим моментом
асинхронной машины.
также называют опрокидывающим моментом
асинхронной машины.
Механическая
характеристика является важнейшей
эксплуатационной характеристикой
двигателя. По ней выбирается двигатель
как элемент электропривода . Например,
если приводной механизм имеет момент
сопротивления
![]() , то очевидно,
что выбираемый для данного привода
электродвигатель должен иметь
, то очевидно,
что выбираемый для данного привода
электродвигатель должен иметь
![]() .
Тогда
.
Тогда![]() .
.
С
помощью механических характеристик
проводят также анализ процесса
регулирования частоты вращения двигателя.
Например, рассмотрим, как изменится
частота вращения двигателя с Фазным
ротора у которого с помощью реостата
![]() увеличили сопротивление цепи ротора
увеличили сопротивление цепи ротора![]() .
Увеличение
.
Увеличение![]() ,
как следует
из формул (З), вызывает рост критического
скольжения
,
как следует
из формул (З), вызывает рост критического
скольжения
![]() (уменьшение
(уменьшение![]() ), но не
изменяет значения максимального момента
), но не
изменяет значения максимального момента
![]() ,
двигателя.
Поэтому механическая характеристика
двигателя с включенным реостатом (она
называется искусственной) пойдет ниже
естественной
,
двигателя.
Поэтому механическая характеристика
двигателя с включенным реостатом (она
называется искусственной) пойдет ниже
естественной
![]() и при том же моменте сопротивлении
и при том же моменте сопротивлении![]() скорость
вращения уменьшится на
скорость
вращения уменьшится на
![]() (рис.2). Изменить вид механической
характеристики двигателя и, естественно,
частоту вращения его вала можно также
изменением частоты
(рис.2). Изменить вид механической
характеристики двигателя и, естественно,
частоту вращения его вала можно также
изменением частоты![]() питающей сети и числа пар полюсов
питающей сети и числа пар полюсов![]() двигателя (см. формулы (3) , ( 4)).
двигателя (см. формулы (3) , ( 4)).