

Муаровый эффект в растровых измерительных системах
В электронных тахеометрах и других измерительных приборах широко используется так называемый муаровый эффект. Муар возникает при наложении двух систем параллельных линий с периодом d, пересекающихся под острым (менее 30° [13]) линий (рис. 23). Чем меньше угол а между линиями растровых решеток, тем шире муаровая полоса D; при нулевом значении угла ширина полосы равна практически бесконечности, получается обтюрационное растровое сопряжение решеток.
Рис. 23. Муаровые полосы при сопряжении двух растровых решеток: d - период растровой решетки; D - ширина муаровой полосы;
а- угол между решетками
1.3.Основные законы геометрической оптики
Принцип Ферма
Это основной принцип геометрической оптики: световой поток может распространяться не только по пути, требующему наименьшего времени прохождения, но и по пути, требующему максимального времени, либо по путям с одинаковым временем прохождения. Из принципа Ферма могут быть получены основные законы геометрической оптики.
Закон прямолинейного распространения света
В однородной и изотропной среде оптическое излучение распространяется по прямой линии и представляет собой геометрический луч.
34
Закон независимого распространения света
Отдельные лучи в среде распространяются независимо друг от друга.
Закон преломления
Угол падения £ и угол преломления £' (рис. 24) связаны зависимостью:
n sin £ = n'sin £', |
(20) |
а |
б |
Рис. 24. Схема хода лучей на границе двух сред
при этом углы г и е' лежат в одной плоскости с нормалью NN. При переходе луча из более плотной среды в менее плотную наступает момент, когда угол £ достигает критического значения (£'кр) - при этом наблюдается явление полного внутреннего отражения (sin £'кр = 1), совместно с принципом Ферма используемое в отражающих призмах.
Если лучи падают на отражающую грань под углом от нормали, меньшим критического значения £, то на эту грань наносят отражающее покрытие (внешнее или внутреннее).
Закон отражения
Закон отражения (рис. 25) действует, когда падающий в среде с показателем преломления п луч возвращается в ту же среду, при этом угол падения £ и угол отражения £' равны, так как п' = п, и лежат в одной плоскости с нормалью NN. Падающий и отраженный лучи обратимы.
35
1.3.1. Оптические детали и системы, часто используемые в геодезических приборах
Построение изображений положительной и отрицательной линзами
Для построения изображения любой точки предмета через линзу (рис. 26 и 27) необходимы как минимум два луча, при этом луч, падающий на линзу из точки предмета параллельно оптической оси, после линзы пройдет через задний фокус (F), луч, падающий на линзу через передний фокус (F), после линзы выйдет параллельно оптической оси, а луч, прошедший через главную точку (Н), после линзы выйдет, не изменяя своего первоначального направления.
Ход лучей в призмах полного внутреннего отражения
Призмы используют для изменения хода лучей, изменения направления линии визирования, оборачивания изображений, разделения пучков лучей, а также для компенсации поворота изображений.
По сравнению с зеркалами призмы имеют ряд преимуществ: углы между гранями призмы неизменны; потери света от граней с полным внутренним отражением практически равны нулю; упрощена конструкция прибора, значительно меньшие требования к юстировке прибора в целом.
36
Рис. 26. Схема построения изображения положительной линзой
Рис. 27. Схема построения изображения отрицательной линзой
37
Призмы обозначают двумя прописными буквами, при этом первая буква обозначает количество отражающих граней (А - одна грань, Б - две грани, В - три грани, при наличии в призме "крыши" дополнительно ставят строчную букву "к"), вторая буква обозначает конструкцию призмы (Р - равнобедренная, С - ромбическая, П - пентапризма, У - полупентапризма, М - дальномерная, А - призма Аббе). После тире показывают угол, на который призма поворачивает падающие на нее лучи.
На рис. 28-36 приведены конструкции наиболее часто встречающихся в геодезических приборах призм и ход лучей в них.
i S
Рис. 28. Призма АР - 90° |
Рис. 29. Призма БР - 180° |
Ход лучей в призмах с зеркальным покрытием
Рассмотрим схемы хода лучей в призмах с зеркальным покрытием (рис. 32-35).
38
Рис. 32. Призма БП - 90° |
Рис. 33. Призма Пехана П - 0° |
(пентапризма) |
|
Призмы П - 0° и А - 0° в приборах используют как оборачивающие системы.
Рис. 34. Призма Аббе А - 0° |
Рис. 35. Призма БУ - 45° |
Оборачивающие системы из нескольких призм
Рис. 36. Призменная система |
Рис. 37. Призменная система |
типа Порро 1 рода |
типа Порро 2 рода |
39
Призменными системами Порро (рис. 36-37) смещается луч, но не изменяет своего направления. Призменную систему типа сфеноид (рис. 38) используют, например, в оптической схеме контактного уровня нивелира Н-3.
Плоские и сферические зеркала
В геодезических приборах используют зеркала как с наружным, так и внутренним покрытием. В ответственных узлах при сходящихся лучах зеркала с внутренним покрытием практически не используют, так как может возникать двоение изображения. Для получения прямого изображения в системе используют четное количество плоских зеркал. В основном плоские зеркала используют в осветительных устройствах, видоискателях и т.п.
Сферические зеркала применяют для астрономических приборов, прожекторов, в зеркально-линзовом объективе (например, Д.Д. Максутова (рис. 39)) в теодолите Theo 010, при этом значительно уменьшается длина зрительной трубы при большом фокусном расстоянии объектива.
1
Рис. 39. Зеркально-линзовый объектив Д.Д. Максутова:
1 - ахроматический мениск; 2 - зеркальное покрытие; 3 - отрицательная фокусирующая линза; 4 - вогнутое зеркало; 5 - сетка нитей; 6 - окуляр
40
Рис. 40. Ход лучей в сферическом зеркале: г - радиус сферы
Примеры построения изображений в сферических зеркалах подробно рассмотрены в [15].
Сетки нитей геодезических приборов
Сетка нитей, как правило, выполнена на тонкой стеклянной пластине, толщина выгравированных штрихов порядка 1 - 2 мкм [9].
На рис. 41 показаны сетки нитей, наиболее распространенные в геодезических приборах [55].
Для предохранения штрихов сетки нитей на нее часто на-
клеивают тонкую полированную |
пластинку. |
|
|
а |
б |
в |
г |
\ * |
ч |
|
Рис. 41. Сетки нитей геодезических приборов:
а - нивелира типа Н-ЗКЛ; б - нивелира типа Н-05; в,г - теодолитов; д,е - астрономических приборов (д - для измерения азимутов и долгот; е - для измерения зенитных расстояний и широт)
41
Типовые оптические системы Лупа
Лупа как правило работает совместно с глазом и дает бесконечно удаленное изображение предмета (рис. 42).
Глаз
Рис. 42. Схема хода лучей в лупе
Увеличением лупы называют отношение угла (3', под которым предмет виден через лупу, к углу В, под которым пред-
г |
^ |
R |
тт |
мет виден невооруженным глазом, Г = |
|
. При расстоянии |
|
|
tgP |
250 |
|
наилучшего видения S = 250 мм увеличение Г =
Г'
Вгеодезических приборах лупы дают увеличение порядка 5-14 крат.
Вприведенных ниже оптических системах лупа работает как окуляр.
Типовые схемы окуляров приведены в [45].
Телеобъектив
Ход лучей в телеобъективе показан на рис. 43 [74]. Фокусирующая линза 2 позволяет установить резкое изображение предмета в плоскости 3, расположенного на расстоянии от до расстояния ближнего визирования. На рис. 43 приняты следующие обозначения: f'экв - эквивалентное фокусное расстояние телеобъектива, Н' - положение главной точки телеобъектива, L - расстояние между объективом 1 и фокусирующей линзой 2.
42
Рис. 43. Ход лучей в телеобъективе: 1 - положительный объектив; 2 - отрицательная фокусирующая линза; 3 - сетка нитей
Эквивалентное фокусное расстояние телеобъектива расчи-
тывают по формуле: |
„ „ |
|
|
/'1/'2 |
|
f3KB= |
/'i + /'2 - L ' |
( 2 1 ) |
где f 2 - фокусное расстояние фокусирующей линзы, f х - |
фо- |
|
кусное расстояние положительного объектива. |
|
|
Если в плоскости 3 установить сетку нитей, а за ней окуляр, фокус которого расположить в плоскости сетки нитей, то получим оптическую схему зрительной трубы с внутренней фокусировкой, обеспечивающую высокую стабильность положения визирной оси (линии, соединяющей центр объектива (точка Н' на рис. 43) и перекрестие сетки нитей (точка С)). Порядок расчета зрительных труб приведен в [45].
Отсчетный микроскоп
Схема хода лучей в микроскопе представлена на рис. 44, где АД - апертурная диафрагма (обеспечивает наружную освещенность изображения, установка ее в задней фокальной плоскости объектива позволяет исключить влияние параллакса (несовпадение плоскости наведения с плоскостью шкалы) на точность измерений), ПД - полевая диафрагма (позволяет выделить нужный участок изображения).
43
Рис. 44. Схема хода лучей в отсчетном микроскопе
В отсчетном микроскопе оптический интервал Д больше фокусного расстояния объектива, поэтому изображение после объектива обратное, действительное и увеличенное. Окуляр дает прямое, мнимое и увеличенное изображение. В целом в микроскопе получается обратное, увеличенное и мнимое изображение. Видимое увеличение микроскопа
А |
250 |
|
Гм = " Г об |
f oK • |
(22) |
Коллиматор
Ход лучей в коллиматоре показан на рис. 45. Коллиматор состоит из осветителя, тест-шкалы и длиннофокусного объектива. Коллиматор используют для иммитации бесконечно удаленных предметов, например, звезд. Кроме того, его применяют при контроле и юстировке оптических и оптико-элек- тронных приборов. На выходе коллиматора получается параллельный пучок лучей.
Студенты, изучая сложные оптические схемы приборов, например, оптический микрометр теодолита ЗТ2КП, должны уметь различать в них простые элементы, что необходимо как для понимания принципов работы приборов, так и для их юстировки и ремонта. Более подробно теория простейших оптических элементов рассмотрена в [23, 25, 74].
44
Контрольные вопросы
1.Основные законы геометрической оптики.
2.Основные законы и явления физической оптики.
3.Ход лучей в простейших оптических элементах и системах, рассмотренных выше.

2. ИССЛЕДОВАНИЕ ЦИЛИНДРИЧЕСКИХ УРОВНЕЙ НА ЭКЗАМЕНАТОРЕ
Цель работы: изучить устройство экзаменатора, исследовать цену деления х цилиндрического уровня, исследовать чувствительность g цилиндрического уровня, иметь представление о других методах исследований уровней.
Приборы и принадлежности: механический экзаменатор и исследуемые уровни.
Содержание и порядок выполнения работы
Методы исследования цены деления цилиндрического уровня
Известно несколько методов исследования цены деления уровней [24, 25, 26, 45, 79]. Наиболее часто в практике используют три из них: при помощи подъемных винтов, при помощи рейки, на экзаменаторе.
Первый метод используют в основном для выявления цены деления уровней угломерных приборов малой точности. Второй метод используют для выявления цены деления уровней нивелиров и теодолитов (рис. 46).
Рис. 46. Принципиальная схема исследования уровня по рейке
46
Оба метода подробно описаны в учебниках по геодезии и поэтому в данной работе не рассматриваются.
В настоящее время известны три типа экзаменаторов: интерференционные, электронные и механические [46]. В геодезической практике наибольшее применение нашли механические экзаменаторы.
Исследование цены деления цилиндрических уровней на механическом экзаменаторе
Схема механического экзаменатора показана на рис. 47.
Рис. 47. Принципиальная схема механического экзаменатора:
1 - Т-образная рама; 2 - подъемные винты; 3 - микрометренный винт (60 или 120, или 180 делений); 4 - отсчетный индекс; 5 - опоры для установки испытуемого уровня; 6 - подпятник; 7 - ось; 8 - установочный уровень; 9 - испытуемый уровень; 10 - головка микрометренного винта; И - ось подъемного винта
47
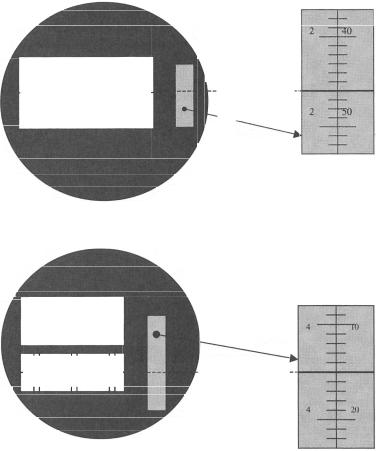
При исследованиях один прием включает прямой и обратный ход, при этом рекомендуют смещать пузырек не менее, чем на 2 -s- 4 деления.
Пример исследований приведен в табл. 2, где приняты следующие обозначения: JI - отсчет по левому краю пузырька уровня, П - отсчет по правому краю, а{ - отсчет по шкале экзаменатора в угловых секундах, DL = JI - П - длина пузырька уровня,
(>/7 + 77) |
_ п о л о ж е н и е |
середины пузырька в делениях уровня, |
|
2 |
|
|
|
п = (Л + 77)/ +1 (Л + П)1 |
перемещение пузырька в делениях |
||
уровня, |
т, = — — — - |
цена i-ro деления уровня в угловых се- |
|
|
п |
|
|
кундах. На лимбе микрометренного винта имеется 120 делений, при этом цена одного деления равна 1".
|
|
|
|
|
|
|
|
|
Т а б л и ц а 2 |
|
№ |
/ Отсчет по |
Ч |
|
AD |
Л + П |
|
п, |
|
ч |
|
при-/ |
шкале уровня |
|
2 |
' |
|
|||||
ема/ |
|
|
дел |
дел |
|
и |
||||
/Уст. Л, дел |
П, дел |
|
|
дел |
|
|
|
|||
|
Прямой ход |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
1 |
0,5 |
13,9 |
0 |
01,0 |
13,4 |
7,20 |
|
2,95 |
46,6 |
15,8 |
2 |
3,5 |
16,8 |
0 |
47,6 |
13,3 |
10,15 |
|
2,95 |
46,5 |
15,8 |
0 з |
6,4 |
19,8 |
1 |
34,1 |
13.4 |
13,10 |
|
|||
|
2,85 |
46,3 |
16,2 |
|||||||
4 |
9,2 |
22,7 |
2 |
20,4 |
13.5 |
15,95 |
|
|||
|
3,15 |
47,9 |
15,2 |
|||||||
5 |
12,4 |
25,8 |
3 |
08,3 |
13,4 |
19,10 |
|
|||
Порядок исследований: 1) по накладному уровню горизонтировать Т-образную раму в направлении подъемных винтов 2 (см. рис. 47), после чего ренным винтом 3 сместить левый край пузырька испытуемого уровня в сторону подъемных винтов рамы; 2) вращая микрометренный винт по часовой стрелке, установить левый край пузырька и отсчитать по уровню Л^ и П| и по микрометренному винту 3 щ (из-за разной прилипаемости жидкости к стенкам ампулы может возникнуть погрешность, поэтому лучше выявлять положение пузырька как
48
среднее по двум его концам [25]), в зависимости от длины ампулы уровня повторить действия, описанные в пункте 2 на всей шкале в прямом и обратном ходах, при этом в обратном ходе микрометренный винт вращать против хода часовой стрелки.
При исследовании цены деления цилиндрических уровней необходимо выполнить не менее четырех смещений пузырька уровня, при этом значения цены деления, полученные из разных серий, не должны отличаться более, чем на 10%.
Цена деления уровня = (х{ ср пр. + х{ ср,о6р)/2.
Цену деления на любом участке шкалы можно определить графически [25].
При этом по оси абсцисс необходимо отложить средние значения смещений середины пузырька уровня Ак. = Ki - KHSL4,
^ л + п
где а , = — - — , п о оси ординат - соответствующие им значения наклонов экзаменатора Д = я, - янач из прямого и обрат-
ного ходов.
В табл. 2 и на рис. 48 в качестве примера показаны результаты исследований цены деления уровня в прямом ходе.
Рис. 48. Графическое определение цены деления уровня
При исследовании цены деления уровней нивелиров необходимо измерить рулеткой расстояние S (см. рис. 46) до рейки, отсчитать по концам пузырька Я{ и П{ при отсчете по рейке В1? а также Jl2 и П2 при отсчете по рейке В2. Пример записи приведен в табл. 3.
49
Т а б л и ца 3
|
|
|
Отсчеты по |
|
|
М' = |
|
а* |
|
|
концам |
|
л ^ п . |
=(Л+П)Н1- |
|
ai+l ~ai |
пузырька |
л4 + ц, |
-(Л + П)„ |
||||
н |
|
н |
уровня |
дел |
дел |
дел |
|
|
|
|
Л, дел П, дел |
|
|
|
|
а, |
а2 |
_а1 |
Л, |
пх |
л1 + п1 |
Л| — П] |
|
а2 |
л2 |
п2 |
Л 2 +П 2 |
Л 2 - П 2 |
|
||
а3 |
-а2 |
|
|||||
аз |
Л3 |
П3 |
л3 + п3 |
л 3 - п 3 |
|
||
|
|
|
|||||
Цену деления уровня вычислить как:
%
н
Т23
т = т |
2 Ц + 1 - д , ) х р " |
где р" = 206265
Исследование чувствительности цилиндрического уровня на экзаменаторе
Точность и чувствительность экзаменатора зависит от длины рычага, чем он длиннее, тем чувствительнее экзаменатор.
При исследовании чувствительности уровня на экзаменаторе измерения выполняют на различных участках ампулы уровня [24]. Пример исследований показан в табл. 4.
|
|
|
|
|
|
|
Т а б л и ц а 4 |
№№ |
|
на ввинчивание на вывинчивание |
чувствительность |
||||
приема |
Si |
винта экзам. |
винта экзам. |
уровня g |
|||
1 |
|
Л! |
П! |
л2 |
П2 |
Л , - Л 2 |
П , - П 2 |
5 |
1,5 |
15,5 |
1,7 |
15,7 |
-0,2 |
-0,2 |
|
2 |
5 |
1,7 |
15,6 |
1,6 |
15,6 |
+0,1 |
0,0 |
3 |
5 |
1,7 |
15,7 |
1,7 |
15,6 |
0,0 |
+0,1 |
1 |
25 |
2,8 |
16,7 |
2,9 |
16,8 |
-0,1 |
-0,1 |
2 |
25 |
2,9 |
16,8 |
2,9 |
16,9 |
0,0 |
-0,1 |
3 |
25 |
2,8 |
16,7 |
2,9 |
16,8 |
-0,1 |
-0,1 |
Порядок исследований: вращая микрометренный винт по часовой стрелке, установить круглый отсчет по лимбу экзаменатора и отсчитать по концам пузырька уровня Я{ и П{.
50
Сместить пузырек в ту же сторону. Вращая микрометренный винт против хода часовой стрелки, установить тот же отсчет и отсчитать по концам пузырька уровня JI2 и П2. Измерения повторить не менее трех раз. Для каждого следующего положения пузырька уровня отсчет по лимбу микрометренного винта должен отличаться на круглое количество делений, например на 10 делений.
При исследовании чувствительности уровней по рейке порядок измерений может быть аналогичным, при этом устанавливают кратные целому делению отсчеты по рейке. Для точ-
ных уровней размах разности отсчетов Лх |
— JI2 или ^ - П2 не |
должен превышать 0,5 деления. |
|
Экзаменаторы выпускают двух разрядов: 1-го разряда с |
|
ценой деления отсчетного устройства 0,1 |
0,3" (клиновой эк- |
заменатор, разработанный в Пулковской астрономической обсерватории, имеет цену деления отсчетного устройства 0,1"); 2-го разряда (экзаменаторы с ценой деления 1 -s- 5 служащие для поверки уровней с ценой деления 4 15"). Если экзаменатор укомплектовать многооборотным индикатором, например, типа 1ИГМ, то им можно поверять уровни и ампулы уровней с пределом измерения 17' [9].
Вывод: 1. Цена деления цилиндрического уровня, исследованного на экзаменаторе, в прямом ходе т = 15,7"± 0,72" (по паспорту - (15" ± 10%)),
2. Чувствительность цилиндрического уровня gmax = 0,2 дел. (при gaon = 0,5 деления уровня).
Контрольные вопросы
1.Типы и устройство уровней.
2.Устройство экзаменатора.
3.Методы исследования цены деления уровней.
4.Методы крепления ампул уровней в оправе.
5.Исследование чувствительности уровней.
6.От чего зависит чувствительность уровней.
3.ИЗУЧЕНИЕ УСТРОЙСТВА, ВЫЯВЛЕНИЕ
ИУСТРАНЕНИЕ НЕИСПРАВНОСТЕЙ УРОВЕННЫХ НИВЕЛИРОВ ТИПА Н-3
Цель работы: изучить устройство нивелира в целом, оптическую схему зрительной трубы и контактного уровня (рис. 49), устройство механических узлов: подъемных винтов подставки нивелира (рис. 52, 53), наводящего (рис. 54), элевационного (рис. 55) и стопорного винтов, вертикальной осевой системы (рис. 51), а также крепление и юстировку цилиндрического и круглого уровней, порядок выполнения неполной разборки и сборки прибора, правила чистки и смазки механических узлов, основные неисправности оптических и механических узлов и по заданию преподавателя выявить и устранить некоторые из неисправностей прибора.
Приборы и принадлежности: нивелир Н-3 (НИ-3), 3 отвертки (в том числе так называемые часовые отвертки) разных размеров, ключ, шпилька, вата, три деревянные палочки для чистки и смазки, спирт (50% спирта + 50% эфира), бензин, веретенное масло, ветошь, лист плотной бумаги.
Содержание и порядок выполнения работы
Разборку нивелира, как и любого точного геодезического прибора, разрешают выполнять квалифицированному специалисту. В нивелире инженер-геодезист может произвести чистку оптических деталей, чистку и смазку механических деталей и узлов, заменить пружины и штифты наводящего и элевационного винтов, заменить ампулы уровней, отрегулировать ход подъемных винтов, исправить главное условие и перекос сетки нитей, исправить несимметричное и нерезкое изображение концов пузырька контактного уровня в поле зрения зрительной трубы, а также выполнить другие профилактические
икотировочные работы.
Впроцессе разборки прибора необходимо соблюдать следующие правила: до разборки прибора или его узлов нанести метки на сопрягаемые детали; подбирать размер отвертки со-
52
размерно шлицу винтов; перед вывинчиванием винта проверить наличие стопорных винтов; располагать детали в определенном порядке, запоминая очередность разборки; для сохранения резьбы винтов и гаек целесообразно крепежные винты деталей и узлов устанавливать сразу после их снятия на свое место; перед завинчиванием винта необходимо слегка смазать его резьбу; не допускать резких рывков при затягивании винтов и гаек, а также их перетягивания или недокрепления; прочищать металлические детали бензином, оптические детали - спиртом-ректификатом; выполнять разборку в сухом помещении.
Принципиальная оптическая схема нивелира Н-3 показана на рис. 49.
Главное условие нивелира с элевационным винтом: визирная ось зрительной трубы (линия, соединяющая центр объектива и центр сетки нитей) должна быть параллельна оси цилиндрического уровня (касательной к внутренней поверхности ампулы уровня, проведенной вдоль его длины через пузырек, при нахождении пузырька в нуль - пункте) [5, 10, 51, 47, 53, 94].
Главное условие в нивелире Н-3 (НИ-3) исправляется вертикальными котировочными винтами цилиндрического уров-
Рис. 49. Оптическая схема нивелира Н-3:
1 - объектив; 2 - фокусирующая линза; 3 - сетка нитей; 4 - окуляр; 5 - ампула уровня; 6 - пузырек цилиндрического уровня; 7 - блок из двух сфеноидов типа БМ-90°; 8 - призма АР-90°; 10 - микрообъектив; 9 и 11 - ромб-призмы БС-0°
53

заглушку, расположенную в правом верхнем углу, и, ослабив два винта крепления оправы микрообъектива 10, переместить оправу за головку одного из винтов вдоль оптической оси до получения резкого изображения, после чего закрепить крепежные винты оправы микрообъектива, установить заглушку и закрыть кожух уровня. Перекос сетки нитей 3 относительно отвесной линии устранить после отделения оправы окуляра 4 (рис. 58). Для этого необходимо вывинтить три винта крепления окуляра, отделить окуляр и, ослабив верхний и нижний винты крепления сетки на полный оборот, а средний винт на четверть оборота, развернуть сетку, после чего в обратном порядке закрепить все винты.
Зрительную трубу нивелира разбирать запрещается. Однако, в случае крайней необходимости, следует: отстопорить и вывинтить объектив, отделить втулку с фокусирующей линзой,
разобрать трехлинзовый объектив. |
|
|
При этом особое внимание необ- |
|
|
ходимо уделить расположению линз |
|
|
объектива, закрепительного и пру- |
|
|
жинного колец относительно корпу- |
|
|
са объектива, нанеся на них метки. |
|
|
Принципиальная схема вертикаль- |
|
|
ной оси вращения нивелира Н-3 пока- |
|
|
зана на рис. 51. Для чистки и смазки |
|
|
осевой системы нивелира Н-3 необхо- |
|
|
димо отделить верхнюю часть от под- |
|
|
ставки. Для этого отверткой следует |
|
|
вывинтить соединительный винт 3 |
|
|
втулки 2 с осью 1 и, придерживая пат- |
|
|
рон с пружиной наводящего винта |
|
|
(рис. 56), легким вращением вынуть |
|
|
ось с трубой из втулки 2. При сборке |
|
|
обратить внимание на износ сферичес- |
Рис. 51. Схема |
|
кой головки 4 и пятки 5 (между ними |
вертикальной оси |
|
должен быть точечный контакт). |
вращения нивелира Н-3: |
|
1 - ось; 2 - втулка; |
||
Для чистки и смазки оси необхо- |
||
3 - соединительный |
||
димо применять тонкие деревянные |
(ограничительный) винт; |
|
палочки, для снятия загрязнения на |
4 - сферический |
|
наконечник оси 1; |
||
одну из них наматывают вату, про- |
5 - пятка(полированная |
|
питанную бензином, другую деревян- |
закаленная ППП) |
55
ную палочку используют для нанесения одной - двух капель масла (не более).
Для летней смазки применяют масло типа ОКБ-122-16 или ОКБ-122-5, для зимней смазки - масло типа ОКБ-122-12 или ОКБ-122-7. Ось рекомендуется смазывать не чаще одного раза в сезон [49].
Ознакомимся с конструкциями подъемных винтов.
На рис. 52 показана конструкция одного из подъемных винтов, используемых в нивелире H-3KJI. На рис. 53 показана конструкция подъемного винта, используемого в нивелирах ЗН-ЗКЛ и 4Н-2КЛ (ПО "УОМЗ").
1
Рис. 52. Подъемный винт нивелира H-3KJ1:
1 - винт со сферической опорой; 2 - головка; 3 - оправа винта; 4 - шлиц оправы; 5 - разрезная втулка; 6 - зажимная гайка регулировки плавности хода подъемного винта; 7 - отверстия под шпильку
Люфт или чрезмерное усилие вращения подъемных винтов, изображенных на рис. 52, регулируют шпилькой, вывинтив винт 1 до совмещения отверстий 7 с отверстиями в головке 2 (на рис. 52 не показаны), при недостаточной устойчивости подставки у нивелиров ЗН-ЗКЛ необходимо вывинтить подъемные винты до упора и отрегулировать их ход регулировочными стопорными винтами 5 (см. рис. 53), устранив зазор между винтом 2 и цилиндрическим приливом 10.
56
Рис. 53. Подъемный винт нивелира 3H-3KJI:
1 - ограничительная гайка; 2 - винт; 3 - упор; 4 - втулка; 5 - стопорный винт; 6 - головка винта; 7 - трегер; 8 - шарик; 9 - упорная пластина;
10 - цилиндрический прилив
На рис. 54 приведена принципиальная схема наводящего
винта. |
5 |
6 |
7 |
% |
Рис. 54. Принципиальная схема наводящего винта:
1 - патрон возвратной пружины; 2 - возвратная пружина; 3 - зажимная втулка; 4 - водильце; 5 - штифт; 6 - рама крепления зрительной трубы;
7 - головка наводящего винта
При разборке наводящего винта необходимо вывинтить стопорные винты и отделить патрон возвратной пружины или головку наводящего винта от корпуса (см. рис. 57).
Элевационный винт (рис. 55) используют в нивелирах для приведения визирной оси (линии, соединяющей центр объектива и центр сетки нитей) зрительной трубы в горизонтальное положение.
Разборка элевационного винта практически не отличается от разборки наводящего винта. Сборку нивелира выполняют в обратном порядке.
57
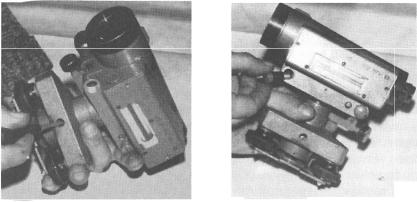
Рис. 55. Принципиальная схема элевационного винта:
1 - оправа; 2 - конус; 3 - соединительный штифт; 4 - головка элевационного винта; 5 - упор; 6 - направляющая втулка; 7 - подъемный штифт; 8 - прилив корпуса зрительной трубы; 9 - пружина; 10 - регулируемая по высоте пята
Основные неисправности элевационного винта: при ввинчивании головки 4 окулярная часть корпуса зрительной трубы не поднимается, причины: отсутствует штифт 7 или сносилась пара штифт - конус; при вывинчивании головки 4 окулярная часть не опускается, причины: ослабла или сломалась пружина 9 (для устранения неисправностей необходимо разобрать элевационный винт и заменить неисправную деталь); при отгоризонтированном по поверенному круглому уровню приборе не работает элевационный винт, причина: изношен штифт 7 (для исправления необходимо вывинтить пяту 10).
Рис. 56. Вывинчивание |
Рис. 57. Разборка |
соединительного винта |
наводящего винта |
58
Рис. 58. |
Отделение |
Рис. 59. Регулировка блока |
оправы |
окуляра |
сфеноидов |
На рис. 56 приведен пример вывинчивания соединительного винта 3 (рис. 51) при отделении зрительной трубы от подставки. На рис. 57 приведен пример разборки наводящего винта (вывинчивание упора 5 (см. рис. 55)). На рис. 58 показано вывинчивание винтов крепления окуляра. На рис. 59 приведен пример регулировки блока сфеноидов.
Контрольные вопросы
1. Правила разборки геодезических приборов и порядок разборки и сборки нивелира Н-3.
2.Устройство контактного уровня нивелира Н-3, неисправности и их устранение.
3.Поверки и юстировка главного условия и перекоса сетки нитей относительно оси вращения нивелира с элевационным винтом.
4.Устройство и принцип действия элевационного винта нивелира Н-3 и устранение его неисправностей.
5.Устройство и принцип действия подъемных винтов подставки, устранение неисправностей.
6.Устройство и принцип действия наводящего винта, устранение неисправностей.
7.Основные неисправности, чистка и смазка вертикальной оси вращения нивелира Н-3.
4. ИЗУЧЕНИЕ УСТРОЙСТВА НИВЕЛИРОВ С КОМПЕНСАТОРАМИ И ИХ ИССЛЕДОВАНИЯ
Цель работы: изучить конструктивные особенности компенсаторов, порядок неполной разборки и сборки нивелиров с компенсаторами, основные неисправности и их устранение; исследовать параметры компенсатора [34]: время затухания tk диапазон работы компенсатора vK, случайную погрешность компенсатора (среднюю квадратическую погрешность) mk, систематическую погрешность работы компенсатора 9К
Приборы и принадлежности: нивелир типа H-3KJI (НЙК-2), реечка с миллиметровыми делениями шкалы, секундомер, набор часовых отверток, шпилька, три деревянные палочки, вата, спирт, бензин, веретенное масло, ветошь.
Содержание и порядок выполнения работы
Главное условие нивелира с компенсатором: визирная ось в пределах работы компенсатора должна быть горизонтальна в момент визирования на рейку [79].
При наклонах зрительной трубы в пределах работы компенсатора визирная ось должна соответствовать горизонтальному положению. В настоящее время наибольшее распространение получили схемы с оптико-механическими компенсаторами [44, 79, 80].
Принцип действия оптико-механического компенсатора показан на рис. 60 [24, 45]. Здесь: при горизонтальном положении визирная ось проходит через точку П на рейке, центр объектива (главную точку Н объектива) и перекрестие сетки нитей С. Однако, во время работы с прибором зрительная труба может наклониться на угол g, поэтому отсчет П будет смещен относительно перекрестия сетки нитей и составит П1в
Компенсатор, установленный в точке К, приводит изображение точки П автоматически в перекрестие сетки нитей С^ При этом выполняется основное уравнение компенсации (23).
Из геометрии видно, что: |
|
f sin y = S sin (3. |
(23) |
60
одъектиб "V |
п |
рейка |
/ ц ' ^ |
|
сетка нитей |
Рис. 60. Схема оптико-механического компенсатора
При расчетах схем компенсаторов, из-за малого значения углов у и (3, используют уравнение вида:
f y = S p . |
(24) |
Чтобы получить необходимый для компенсации угол р при наклоне зрительной трубы на угол у, в большинстве случаев используют маятниковые системы подвески компенсаторов, в которых оптическая деталь (призма, зеркало или линза) подвешена или на тонких бериллиевых нитях, модуль нормальной упругости которых равен
31000 кг/мм2 [70], или на плоской пружине (как в нивелирах НИК-2 и НИК-2М).
В настоящее время известны схемы нитяных подвесок ком-
пенсаторов, изображенные на рис. 61. На схемах приведен |
|
коэффициент механической компенсации |
[69]. |
У
В общем случае для схем подвесок, приведенных на рис. 61, получена приближенная формула для расчета Км в зависимости от геометрических размеров подвески и положения центра тяжести [43]:
К. = ± — П |
^Г |
Г> |
С25) |
4в с |
+ с(а - с)ъ + 4hL(a - |
с)2 |
|
где а -АВ, с - СД, в = АД = ВС - для подвесок на параллельных нитях и виде трапеции; в = АС = ДВ - для подвесок на
61
скрешивающихся нитях; h - расстояние между основанием СД подвески и корпусом АВ,
(26)
L - расстояние от центра тяжести подвешенной части до основания СД (положительно, если центр тяжести находится ниже основания СД, отрицательно, если центр тяжести выше основания СД). Знак " + " в формуле (25) соответствует подвескам на параллельных нитях, знак " - " - подвескам на скрещивающихся нитях.
К м > 1
Рис. 61. Схемы нитяных подвесок компенсаторов:
а, в, г - обратный шарнирный четырехугольник; б, д, е - прямой шарнирный четырехугольник
62
В соответствии с уравнением (24) работает и схема с жидкостным компенсатором, приведенная на рис. 62 [25, 45, 65].
Рис. 62. Принципиальная схема работы жидкостного компенсатора:
1,3 - призмы АР-90°; 2 - кювета с жидкостью, содержащей 1,4-1,8% этилового спирта и 98,6-98,2% бензил ацетата
Преимущество схемы состоит в том, что она может стабилизировать ось в пространстве сразу по двум координатам. Жидкостной компенсатор используют в лазерных нивелирах, приборах вертикального проектирования и электронных тахеометрах.
Рассмотрим принципиальную схему с линзовым компенсатором (рис. 63) [35, 45, 65].
Компенсатор представляет собой положительную 2 и отрицательную 1 линзы. Линза 1 жестко скреплена со штангой 3, подвешенной на нитях. Линза 2 закреплена в оправе объекти-
АВ
С
Рис. 63. Принципиальная схема с линзовым компенсатором
63
ва. Линзы компенсатора имеют фокусные расстояния, отличающиеся между собой на значение зазора между ними, что позволяет не нарушать телескопичность зрительной трубы при смещении отрицательной линзы компенсатора.
Уравнение компенсации для этой схемы имеет вид:
L=±=кк'=к, |
(27) |
|
i ь |
м' |
|
|
|
|
где f - фокусное расстояние объектива; а = А В - расстояние между точками закрепления нитей к трубе; Ъ = ED - расстояние между точками закрепления к рычагу 3; / - расстояние от главной точки подвижной линзы компенсатора до середины между точками Е и Д крепления нитей к рычагу 3; К - постоянный коэффициент, зависящий от упругости нитей, нагрузки
на них и положения центра тяжести нагрузки; Км= — = 2,3 - Y
коэффициент механической компенсации.
Схема с линзовым компенсатором использована в нивелире НСМ-2А.
На рис. 64 приведена принципиальная схема нивелира Ni-007 предприятия "Карл Цейс" с компенсатором маятникового типа. Умножительная призма 5 при наклоне зрительной
Рис. 64. Принципиальная схема нивелира Ni-007:
1 - пентапризма; 2 - объектив; 3 - фокусирующая линза; 4 - призма-крыша (служит для получения прямого изображения); 5 - призма БР-1800; 6 - маятник; 7 - сетка нитей; 8 - окуляр; 9 - защитное стекло. Оптическая схема отсчитывания по лимбу не показана
64
трубы на угол g смещает визирный луч на значение А = f у, уравнение компенсации для данного компенсатора имеет вид:
/ = f 72, |
(28) |
где / - длина маятника.
Диапазон работы такого компенсатора порядка ±10'. Поворачиваемая пентапризма 1 служит оптическим микрометром.
На рис. 65 показаны принципиальная схема и принцип работы призменного компенсатора, подвешенного на бериллиевых нитях.
Рис. 65. Принципиальная схема (а) и схема действия (б) призменного компенсатора:
1 - объектив; 2 - фокусирующая линза; 3 - |
призма-компенсатор; |
|
4 - бериллиевые нити; 5 - |
призма АР-90°; 6 - |
сетка нитей; 7 - окуляр; |
8 - |
воздушный демпфер |
|
65
Эту схему используют в точных нивелирах типа НЗК [24, 45, 63, 65]. Здесь Км < -1. При наклоне зрительной трубы на угол g перекрестие сетки нитей С смещается в положение С{. Компенсатор сдвигает изображение правильного отсчета П в новое положение перекрестия сетки нитей на значение
А = At+ Д2. |
(29) |
Полагают [65], что, из-за малости угла наклона у, изменение расстояний / и S мало, и записывают уравнение компенсации в виде:
f ' y = 2 / K M y + 2 S a (Км + 1)
или
К м 2{l + S)
Задаваясь значениями f, S и /, вычисляют геометрические размеры подвески компенсатора. Для нивелира Н-ЗК значения Км = 2,62 -з- 3,143. При сборке прибора изменяют значение S до тех пор, пока погрешность компенсации не будет минимальна.
На этом принципе разработаны схемы нивелиров ЗН-ЗКЛ (рис. 66) и 4Н-2КЛ (рис. 67).
Рис. 66. Принципиальная оптико-механическая схема нивелира ЗН-ЗКЛ:
1 - объектив; 2 - фокусирующая линза; 3 - призма-компенсатор АР-60°; 4 - призма БкУ-60°; 5 - сетка нитей; 6 - окуляр; 7 - подвижные опоры; 8 - бериллиевые нити; 9,15 - магнито-индукционный демпфер (поз. 15 одновременно выполняет роль балансира); 10 - грузики;
11 - стопорный винт; 12 - маятник; 13 - винт; 14 - прокладка
66
В нивелире 4H-2KJI (см. рис. 67) световой поток через клин 1 (служит для исправления главного условия нивелира) попадает на объектив 2 и через него на плоское зеркало 3 (компенсатор), изображение предмета получают в плоскости сетки нитей, выгравированной на плоской поверхности призмы 4, призма 4 приклеена к плоской поверхности линзы объектива 2. Изображение предмета рассматривается через микроскоп с увеличением 30х, состоящий из пентапризмы 5, микрообъектива 6, полевой диафрагмы 7 и окуляра 8. Фокусировку по предмету осуществляют перемещением оправы 12 вместе с компенсатором 3. Зеркало-компенсатор подвешено на нитях, при этом коэффициент механической компенсации выбирают в соответствии со схемой, приведенной на рис. 61, в. При совмещении главной плоскости объектива 2 с плоскостью сетки нитей может быть применена схема, приведенная на рис. 61, а. Для устранения систематической погрешности компенсации предусмотрена возможность регулировки зазора L (см. рис. 67).
Рис. 67. Принципиальная оптико-механическая схема нивелира 4H-2KJI:
1 - клин; 2 - объектив; 3 - плоское зеркало-компенсатор; 4 - призма АР-90° с сеткой нитей; 5 - пентапризма; 6 - микрообъектив; 7 - полевая диафрагма; 8 - окуляр; 9 - четыре бериллиевые нити; 10 - опоры; И - демпфер;
12 - подвижная оправа
67
На рис. 68 показан функциональный блок призменного маятникового типа компенсатора нивелира H-3KJI, на рис. 69 - ход лучей в его призмах.
Рис. 68. Функциональная схема блока компенсатора нивелира H-3KJ1:
1 - призма АР-90° (расположена за призмой 2; показана на рис. 69); 2 - призма БР-1800; 3 - призма компенсатора БР-1800; 4 - призма АР-90°; 5 - маятник;
6 - четыре бериллиевые нити; 7 - балансир для регулировки чувствительности компенсатора; 8 - корпус блока компенсатора; 9 - три регулировочных винта стакана 10 демпфера; И - регулировочный винт чашки 12 демпфера; 13 - ось; ограничивающая маятник от разворотов в горизонтальной плоскости и обрыва нитей; 14 - четыре отверстия крепления блока компенсатора к корпусу трубы; 15 - кронштейн для крепления призмы 4; 16 - винт устранения систематической
погрешности работы компенсатора; 17 - гайка балансира
Расчет компенсатора выполняют согласно уравнению (28). Перемещение подвижной детали компенсатора, как в нивелире 4H-2KJ1, автоматически исключает возможное при фо-
кусировании колебание визирной оси.
В процессе измерений на нивелиры оказывают влияние вибрации почвы, ветер, перемещения наблюдателя и другие динамические нагрузки. Указанные факторы вызывают ко-
68
Рис. 69. Ход лучей в призменной системе компенсатора нивелира H-3KJ1:
1 , 4 - призмы АР-90°; 2 - призма БР-1800; 3 - призма БР-1800 (компенсатор)
лебания чувствительного элемента компенсатора и затрудняют процесс измерений.
ГОСТ 10528-76 регламентирует время затухания tK - продолжительность свободных колебаний или до полного успокоения чувствительного элемента, или до таких его амплитуд, которые не влияют на точность отсчитывания (не воспринимаются глазом наблюдателя).
Для геодезических приборов в основном используют три типа демпферов, гасящих колебания: воздушные (крыльчатые и поршневые (например, в нивелире H-3KJI)), жидкостные и магнитоиндукционные (например, в нивелире 4H-2KJ1).
В нивелире H-3KJI инженер-геодезист должен уметь проверить выполнение главного условия нивелира и при необходимости устранить неисправность, устранить разворот сетки нитей относительно отвесной линии, устранить систематическую погрешность и отрегулировать чувствительность работы компенсатора, исправить демпфер, почистить и смазать осевую систему, отрегулировать плавность хода подъемных винтов подставки, заменить пружину червячного механизма наводящего винта, заменить и отъюстировать положение ампулы круглого уровня. В процессе разборки-сборки необходимо соблюдать правила, указанные в разделе 3.
69
Ось 1 нивелира (рис. 70) с двух сторон опирается на закаленные полированные шайбы 2 и 4, плавность поворота ее во втулке 3 регулируют зажатием гайки 5. Для уменьшения силы трения во втулке 3 делают выборку 6. Доступ к осевой системе нивелира осуществляют после отделения подставки, вывинчивания стопорного винта гайки 5 и самой гайки, а также четырех винтов основания.
Рис. 70. Осевая система нивелира H-3KJI
Для регулировки выполнения главного условия и углового смещения сетки нитей необходимо снять защитный колпачок, легко обхватив его и вращая против хода часовой стрелки.
Невыполнение главного условия в нивелире H-3KJ1 исправляют смещением сетки нитей в вертикальной плоскости двумя винтами, расположенными над и под оправой окуляра (в нивелире Н-ЗК с одной стороны оправа сетки нитей подпружинена). При этом для смещения сетки нитей, например, вниз необходимо ослабить нижний винт примерно на четверть оборота, затем довернуть верхний винт примерно на столько же, одновременно наблюдая за смещением изображения рейки с горизонтальной нити до правильного отсчета, вычисленного при выполнении поверки главного условия нивелира. По окончании юстировки оба винта должны быть затянуты и повторно выполнена поверка.
Смещение сетки нитей от отвесной линии исправляют разворотом оправы окуляра после ослабления четырех винтов крепления в пределах предусмотренных для этого пазов, например, по отвесу - по вертикальной нити, или по удаленной
70
точке предмета - по смещению ее с горизонтальной нити (смещение должно быть не более, чем три толщины нити).
Для юстировки чувствительности компенсатора снимают крышку, затем, придерживая отверткой балансир 7, вращают гайку 17 (см. рис. 68).
Для ремонта компенсатора необходимо снять заштифтованную крышку вместе с окуляром, вывинтив для этого соответствующие винты крепления крышки.
Исправление систематической погрешности работы компенсатора осуществляют ввинчиванием или вывинчиванием отверткой винта 16 (см. рис. 68), тем самым изменяя расстояние S (см. рис. 60).
Корпус блока компенсатора 8 закреплен четырьмя винтами (два из них работают и как штифты - необходимо запомнить их расположение), вывинтив которые, можно снять блок компенсатора.
Натяжение бериллиевых нитей 6 исправляют, ослабив винт прокладки, при этом необходимо следить за тем, чтобы ось 13 при отвесном положении маятника 5 не касалась корпуса 8, исправляют только в мастерских.
Призмы блока компенсатора 1, 2, 4 жестко связаны с корпусом 8 (призмы 1 и 4 приклеены, призма 2 закреплена через прокладку двумя винтами), смещая призму 2, изменяют соотношение между Г и /.
Регулировку зазора между стаканом и чашкой демпфера осуществляют, ослабив регулировочный винт И.
Неисправность наводящего винта, как правило, возникает после ослабления закрепительного винта в рукоятке, что, как следствие, приводит к выталкиванию винта и смещению подпружиненной полу гайки.
Ремонт наводящего винта и горизонтального круга осуществляют, вывинтив четыре винта крепления основания нивелира.
Методика регулировки плавности хода подъемного винта аналогична описанной выше в разделе 3 (см. рис. 52).
В нивелире H-3KJI определенную сложность вызывает замена и регулировка положения круглого уровня, закрепленного через толстую прокладку тремя винтами. Регулировка может быть выполнена одновременно с исследованием диапазона работы компенсатора в двух взаимно перпендикулярных плоскостях. При этом середина диапазона работы ком-
71
пенсатора должна соответствовать нулевому положению пузырька круглого уровня. Пузырек круглого уровня приводится в нулевое (верхнее) положение тремя исправительными (закрепительными) винтами.
На рис. 71 приведена оптическая схема нивелира НИК2М, разработанного на Изюмском приборостроительном заводе. Нивелир обеспечивает за счет введения оптического компонента 3 измерения на расстоянии до рейки от 0,5 м со средней квадратической погрешностью 2 мм на 1 км хода, диапазон работы компенсатора 20', систематическая погрешность компенсатора 0,3", увеличение зрительной трубы 31х.
Рис. 71. Оптическая схема нивелира НИК-2М:
1 - объектив; 2 - фокусирующий компонент; 3 - компонент, обеспечивающий минимальное расстояние при измерениях; 4,6 - призмы АР-90°;
5 - призма-крыша; 7 - сетка нитей; 8 - окуляр; 9 - выходной зрачок; 10 - бериллиевые ленты; 11 - корпус; 12 - точки закрепления бериллиевых нитей
Исследование времени затухания компенсатора
Перед началом испытаний необходимо по круглому уровню отгоризонтировать прибор, затем легким постукиванием по корпусу прибора в районе окулярной части убедиться в работоспособности компенсатора. Если при постукивании наблюдают смещение горизонтальной нити с точки предмета, а затем ее возврат, компенсатор работоспособен. Значение времени затухания tK выявляют по секундомеру из 10 измерений с погрешностью не более 0,5 с. Допускают время затухания не более 2 с.
72
Исследование диапазона работы компенсатора
В полевых условиях нивелир устанавливают на штативе на расстоянии 70 75 м от трехметровой рейки, в лабораторных условиях используют реечку с миллиметровыми делениями, установленную на расстоянии примерно 10 метров. Один из подъемных винтов подставки располагают по направлению на рейку.
Перед началом измерений определяют угол р, на который наклоняют трубу нивелира при повороте подъемного винта на один полный оборот головки 2 (см. рис. 52). Для этого подъемным винтом, установленным по направлению на рейку, наклоняют нивелир на такой угол, при котором компенсатор не работает. Отсчитывают по рейке А1? поворачивают подъемный винт в ту же сторону на один полный оборот и отсчитывают по рейке А2 . УГОЛ наклона Р визирной оси вычисляют как
где S - расстояние от прибора до рейки в мм; р' = 3438'.
|
|
|
|
|
|
Таблица 5 |
||
Продольный наклон |
|
Боковой наклон |
|
|||||
Объектив вверх |
Объектив вниз |
Влево |
Вправо |
|||||
Угол |
Отсчет |
Угол |
Отсчет |
Угол |
Отсчет |
Угол |
Отсчет |
|
наклона |
по рееч- |
наклона |
по рееч- |
наклона |
по рееч- |
наклона |
по рееч- |
|
К |
ке, мм |
р; |
ке, мм |
р; |
ке, мм |
р; |
ке, мм |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
0 |
82,4 |
0 |
82,5 |
0 |
82,5 |
0 |
82,4 |
|
3,1 |
82,4 |
3 |
82,5 |
3,1 |
82,6 |
3,1 |
82,4 |
|
6,2 |
82,4 |
6 |
82,4 |
6,2 |
82,4 |
6,2 |
82,2 |
|
9,3 |
82,4 |
9 |
82,6 |
9,3 |
82,5 |
9,3 |
82,4 |
|
12,4 |
82,4 |
12 |
82,6 |
12,4 |
82,5 |
12,4 |
82,5 |
|
15,5 |
82,4 |
15 |
82,7 |
15,5 |
82,4 |
15,5 |
82,4 |
|
18,6 |
82,5 |
18 |
82,8 |
18,6 |
82,5 |
18,6 |
82,4 |
|
21,7 |
84,0 |
21 |
82,6 |
21,7 |
82,4 |
21,7 |
82,6 |
|
24 |
86,4 |
24,8 |
82,4 |
24,8 |
82,7 |
|||
|
|
|||||||
|
|
27,9 |
82,4 |
27,9 |
82,8 |
|||
|
|
|
|
|||||
|
|
|
|
31,0 |
85,8 |
31,0 |
82,7 |
|
|
|
|
|
34,1 |
85,6 |
|||
|
|
|
|
|
|
|||
73
При повороте винта на один шаг головки (выступ + впадина) прибор наклонится на угол р' = Р'/я, где п - количество
шагов.
По круглому уровню нивелир предварительно горизонтируют (i = О') и отсчитывают по рейке, затем соответствующим подъемным винтом нивелиру придают наклон каждый раз на один шаг, отсчеты по рейке записывают в табл. 5.
Изменение отсчета более, чем на 1 н- 2 мм, свидетельствует о прекращении действия компенсатора.
При исследованиях следят за положением пузырька круглого уровня.
Из табл. 5 следует, что в диапазоне углов наклона v = ± 18,6' компенсатор работает. Согласно требований [34] для нивелиров такого класса точности v > ± 15'. Более точно диапазон действия компенсатора определяют на экзаменаторе, пользуясь микрометренным винтом экзаменатора, а вместо рейки используя коллиматор с окулярным микрометром. Расширение диапазона работы компенсатора ухудшает точность ориентирования прибора относительно отвесной линии и увеличивает время затухания подвижного элемента.
Исследование случайной средней квадратической mk и систематической 0к погрешностей работы компенсатора
При исследовании случайной и систематической составляющих погрешности работы компенсатора нивелир и рейку располагают аналогично предыдущему исследованию. Результаты записывают в табл. 6.
Оценку точности выполняют по следующим формулам:
(30)
(31)
где Abj - разность отсчетов по рейке для одного и того же угла наклона в прямом и обратном ходе.
74
Av = B c p - B 0 , |
(32) |
Av - разность средних отсчетов по рейке из прямого и обратного ходов при наклоне оси нивелира на угол v и при отсутствии наклона (v = О7), S - расстояние от нивелира до рейки, в полевых условиях выбирают [49], исходя из условия лучшей видимости наименьшего деления рейки:
S = |
(33) |
J |
|
где v - увеличение трубы; t - |
цена деления рейки; J = t /10 — |
— видимое значение наименьшего деления рейки. При v = 30х, t = 10 мм имеем S = 75 м.
При исследованиях по реечке с ценой деления 1 мм было
выбрано расстояние S = 7033 мм. |
|
|
|
||||
|
|
|
Х&а |
-2,65 |
, , |
|
|
|
|
ькср= |
= |
~ТГ" |
= " 0 |
' 2 |
|
|
|
|
п |
13 |
|
|
|
где п - |
количество установок прибора. |
|
|
||||
|
|
|
|
|
|
|
Таблица 6 |
Наклон |
Отсчет по |
АЪ- |
Bv= |
в'+в" |
Av = bv - BQ, |
A - A v p |
|
реечке, мм |
2 . |
|
|||||
прибо- |
|
|
в'-в", |
|
|
мм |
|
ра v' |
В пря- |
В обрат- |
мм |
мм |
|
7 ' |
|
|
мом |
ном |
|
|
|
|
|
|
ходе в', |
ходе в", |
|
|
|
|
|
мммм
+ 18 |
82,5 |
82,5 |
0,0 |
82,50 |
-0,05 |
-0,08 |
+ 15 |
82,5 |
82,6 |
-0,1 |
82,55 |
0,0 |
0,0 |
+ 12 |
82,5 |
82,6 |
-0,1 |
82,55 |
0,0 |
0,0 |
+09 |
82,4 |
82,5 |
-0,1 |
82,45 |
-од |
0,31 |
+09 |
82,5 |
82,5 |
0,0 |
82,50 |
0,05 |
0,24 |
+03 |
82,4 |
82,5 |
-0,1 |
82,45 |
-0,1 |
0,95 |
00 |
82,5 |
82,6 |
"0,1 |
в0 = 82,55 |
0,0 |
0,0 |
-03 |
82,5 |
82,6 |
-0,1 |
82,55 |
0,0 |
0,0 |
-06 |
82,5 |
82,5 |
0,0 |
82,50 |
-0,05 |
-0,24 |
-09 |
82,4 |
82,5 |
-0,0 |
82,45 |
-0,1 |
-0,32 |
-12 |
82,4 |
82,5 |
-0,1 |
82,45 |
-0,1 |
-0,24 |
-15 |
82,4 |
82,5 |
-0,1 |
82,45 |
-0,1 |
-0,19 |
-18 |
82,5 |
82,5 |
0,0 |
82,50 |
-0,05 |
-0,08 |
75
|
|
п |
13 |
|
|
здесь п - количество установок |
прибора. |
|
|||
|
Вывод. В результате проведенных исследований выявле- |
||||
но, что у нивелира H-3KJ1 № 7521: |
|
|
|||
|
1) время затухания компенсатора tk |
= 3 сек > 1ВД0П = 2 сек, |
|||
|
2) диапазон работы компенсатора vK = 18! |
> пкдоп= 15', |
|||
|
3) случайная погрешность |
работы компенсатора тк = |
|||
= |
1,7" > т т о и = 0,5", |
погрешность |
работы |
компенсатора |
|
|
4) систематическая |
||||
ек |
= - 0 , 2 " / ' < е а д о п = |
о,з''/'. |
|
|
|
Прибор требует ремонта, так как случайная погрешность работы компенсатора значительно превышает допустимый предел.
Контрольные вопросы
1. Принцип работы оптико-механического компенсатора наклона.
2.Основные схемы компенсаторов.
3.Основные причины, влияющие на точность самоустановки линии визирования.
4.Особенности поверок и исследований нивелиров с компенсаторами.
5.Поверка и юстировка главного условия в нивелире H-3KJI.
6.Сущность метода исследований диапазона работы компенсатора.
7.Основные неисправности нивелиров с компенсаторами
иих устранение.
5. ИЗУЧЕНИЕ УСТРОЙСТВА ВЫСОКОТОЧНЫХ НИВЕЛИРОВ ТИПА Н-05. ИССЛЕДОВАНИЕ ОПТИЧЕСКОГО МИКРОМЕТРА С ПЛОСКОПАРАЛЛЕЛЬНОЙ ПЛАСТИНКОЙ
Цель работы: изучение устройства нивелира, выявление основных неисправностей и их устранение; исследование основных параметров оптического микрометра: цены деления на всей длине шкалы, диапазона работы, люфтов в механизме, наклоняющем плоскопараллельную пластинку.
Приборы и принадлежности: нивелир Н-05 (или Н-2) и компарированная реечка с миллиметровыми делениями.
Содержание и порядок выполнения работы
Нивелирование первого и второго классов выполняют с помощью штриховых инварных реек с ценой деления 5 мм. Штрихи, как правило, нанесены на металлической ленте, выполненной из инвара (сплава, практически не чувствительного к изменениям температуры). В настоящее время выпускают как нивелиры с контактным уровнем при зрительной трубе (например, Изюмский завод с 1979 г. выпускал нивелиры Н-05 с ценой деления уровня -10"), так и нивелиры с компенсатором (например, завод "Карл Цейс" в Йене выпускал нивелир Ni-002, в котором в качестве компенсатора было использовано качающееся зеркало, завод гарантировал при изготовлении значение угла i не более 3" [45]).
Точность отсчитывания по рейке повышают за счет использования зрительных труб с увеличением порядка (40 45)х, а также применения оптического микрометра. В качестве подвижного оптического элемента микрометра наибольшее распространение в нивелирах получила плоскопараллельная пластинка (ППП), расположенная перед объективом (нивелир НА-2 с насадкой перед объективом [24]), или за объективом
77
(нивелиры НБ-2, НБ-3 и НБ-4, где ППП установлена между объективом и фокусирующей линзой [24, 25]). Принципиальная схема устройства оптического микрометра с ППП перед объективом приведена на рис. 72 [25, 45].
1<3 6
Рис. 72. Принципиальная схема тангенциального механизма микрометра:
1 - плоскопараллельная пластинка (ППП); 2 - винт регулировки цены деления барабанчика оптического микрометра; 3 - объектив; 4 - штанга; 5 - шкала барабанчика; 6 - индекс; 7 - контргайка; 8 - шаровая опора регулировочного винта; d - толщина ППП; R - радиус вращения;
8 - угол наклона ППП
Тангенциальный механизм передачи вращения ППП в нивелире Н-05 изображен на рис. 73. На рис. 74 показано поле зрения нивелира. Порядок расчета оптического микрометра с
ППП подробно рассмотрен в учебнике [45].
Для практических расчетов значения смещения луча плоскопараллельной пластинкой при малых углах падения 8 (± 15°) достаточную точность обеспечивает формула, предложенная Г. Вильдом [25]:
h=d(n-me
п
Так как угол £ мал, то формулу (34) записывают в виде [26]:
7 |
de(n-1) |
• |
у(35)} |
h = |
пр |
||
|
78
Рис. 73. Схема тангенциального |
Рис. 74. Поле зрения |
механизма нивелира Н-05: |
нивелира Н-05 |
1 - ППП; 2 - юстировочный винт;
3 - штанга-толкатель;
4 - закрепительный винт
Из формулы (35) видно, что при расположении ППП перпендикулярно падающему лучу (е = 0°) смещение h отсутствует. Цена деления барабанчика отсчетного микрометра равна 0,05 мм, ее регулировку осуществляют изменением длины юстировочного винта с шаровой опорой 2 (см. рис. 73).
Доступ к юстировочному винту осуществляется после снятия крышки под зрительной трубой. При регулировке сначала ослабить винт 4, после чего отверткой завинтить или вывинтить юстировочный винт 2 и снова закрепить винт 4. Количество штрихов на барабанчике должно обеспечивать измерения в пределах цены деления рейки. Конструктивно шкала барабанчика и отсчетный индекс могут быть проецированы, как у нивелира Н-05, в поле зрения зрительной трубы (см. рис. 74).
Порядок исправления установки сетки нитей нивелира Н-05 относительно отвесной линии: снять крышку со стороны окуляра, вывинтив три стопорных винта; снять окуляр, предварительно вывинтив три крепежных винта; ослабить правый и левый винты на оправе сетки нитей на целый оборот, средний винт примерно на четверть оборота; повернуть оправу сетки нитей; надеть окуляр и проверить по отвесу положение вертикального штриха сетки; закрепить сначала средний, а затем правый и левый винты; закрепить на тубусе зрительной трубы окулярное устройство; закрепить окулярную крышку винтами.
79
При неплавном вращении верхней части нивелира Н-05 необходимо в первую очередь проверить смазку вертикальной оси вращения. Для этого необходимо выполнить следующие действия: вывинтить два винта крепления вкладыша, расположенного под установочным уровнем; вывинтить до упора наводящий винт; отжать гильзу возвратной пружины и, слегка поворачивая верхнюю часть нивелира, снять ее с вертикальной оси; протереть ось и втулку салфеткой и нанести на ось 5-^6 капель масла; надеть на ось верхнюю часть, при этом следить за тем, чтобы гильза возвратной пружины попала в углубление на водильце хомутика; ввинтить наводящий винт, при этом шпилька наводящего винта должна попасть в углубление на водильце хомутика; закрепить винтами вкладыш.
Ранее выпускавшиеся нивелиры НБ-2 (ППП расположена внутри трубы) и НА-1 (ППП в виде насадки) имеют ряд одинаковых узлов (например, вертикальную и горизонтальную системы осей и одну оптическую схему контактных уровней (рис. 75) [22]. На рис. 76 приведена оптическая схема нивелира Ni-2.
б
Рис. 75. Оптическая схема контактного уровня нивелира НБ-2:
1 - блок призм-сфеноидов; 2 - призма; 3 - микрообъектив; 4 - ромб-призма; 5 - сетка нитей; 6 - окуляр
80
Рис. 76. Оптическая схема нивелира Ni-2 (фирмы "Carl Zeiss"):
1 - объектив; 2 - отрицательный мениск; 3 - фокусирующая линза;
4 и 7 - призмы; 5 - |
призма-компенсатор; 6 - балансир; 8 - сетка нитей; |
9 - окуляр; 10 - |
корпус зрительной трубы; 11 - бериллиевые нити |
При использовании нивелира Н-05 необходимо придерживаться следующего порядка работы на станции [34, 49, 62]:
отгоризонтировать нивелир по круглому уровню, вращая головку элевационного винта, совместить изобра-
жения концов пузырька цилиндрического уровня (см. рис. 74), вращая барабанчик микрометра, навести биссектор на
ближайший штрих рейки и отсчитать по ней (отсчет А), отсчитать по барабанчику (отсчет В), вычислить полный отсчет как (А + В - 50).
Исследование оптического микрометра с ППП в лабораторных условиях выполняют в следующем порядке:
примерно в 10 метрах от прибора на его высоте установить компарированную реечку с миллиметровыми делениями,
установить отсчет по барабанчику, близкий к нулю, выполнить измерения при наведении на 5 6 штрихов ре-
ечки в прямом (вращать барабанчик оптического микрометра по ходу часовой стрелки (на ввинчивание)) и обратном (вращать барабанчик против хода часовой стрелки (на вывинчивание)) ходе, отсчитывая по шкале микрометра с погрешностью не более 0,1 деления барабанчика, перед отсчитыванием необходимо совмещать концы пузырька контактного уровня.
Результаты измерений заносят в табл. 7, при этом колонку 4 заполняют снизу.
Если пропущен нужный штрих, то барабанчик возвращать назад, а затем выполнять совмещение изображения штриха
81
шкалы с сеткой нитей в нужном направлении. При выполнении исследований в учебных целях можно принять значение цены деления реечки а = 1,000 мм по всей ее длине.
|
|
Отсчеты по шкале |
л |
|||
№ |
№ |
|
микрометра |
Ю |
||
приештр. Пря- |
Обрат- |
® среди — |
Ф |
|||
ма |
рейки |
мой |
ный |
_ &пр+ Ъ0бр т |
||
N |
|
ход |
ход |
2 |
(мх) |
|
|
|
D |
р |
Впр-Воб |
||
|
|
"прдел |
"обрдел |
|
||
1 |
2 |
3 |
4 |
5 |
6 |
|
1 |
6 4 |
2 , 4 |
2,7 |
2 , 5 5 |
- 0 , 3 |
|
6 3 |
2 2 , 9 |
2 3 , 2 |
2 3 , 0 5 |
- 0 , 3 |
||
|
||||||
|
6 2 |
4 2 , 9 |
4 3 , 0 |
4 2 , 9 5 |
- 0 , 1 |
|
|
61 |
6 3 , 8 |
6 4 , 2 |
6 4 , 0 0 |
- 0 , 4 |
|
|
6 0 |
8 3 , 2 |
82,7 |
8 2 , 9 5 |
+ 0 , 5 |
|
|
5 9 |
103,7 |
103,4 |
103,55 |
+ 0 , 3 |
|
|
Т а б л и ц а 7 |
|
Интервалы между |
|
|
штрихами реечки |
|
|
По |
Вдел, |
Цена |
резул. |
шкалы |
деления |
компар |
микром |
Тр м м |
(а) мм |
|
|
7 |
8 |
9 |
1,000 |
2 0 , 5 0 |
0 , 0 4 8 8 |
1,000 |
19,90 |
0 , 0 5 0 2 |
1,000 |
2 1 , 0 5 |
0 , 0 4 7 5 |
1,000 |
18,95 |
0 , 0 5 2 8 |
1,000 |
2 0 , 6 0 |
0 , 0 4 8 5 |
тср = 0,0496 мм
=0,00398 мм
Качество работы передаточного механизма, наклоняющего
ППП, оценивают по разностям отсчетов по шкале из прямого и обратного ходов, исходя из условия:
= |
= 0,05 дел < 1,0 дел, |
(36) |
п |
5 |
|
где п - количество наблюдаемых штрихов на реечке.
При выполнении условия (36) считают, что люфт механизма, наклоняющего ППП, отсутствует, и тогда при измерениях барабанчик можно вращать в любую сторону.
Цену деления шкалы микрометра ij на i-м интервале вы-
числяют как: |
|
\ = ^комп I (®i+l — ®i)* |
(37) |
82
Цену деления Тср из одного приема вычисляют как:
тср = ^ / ( п - 1 ) . |
(38) |
При выполнении работы необходимо провести 2-5-3 приема, в производственных условиях согласно инструкции [34] выполняют N = 6 приемам, затем результаты измерений из шести приемов усредняют, за окончательное значение цены деления принимают:
T 0 = I x c p / N . |
(39) |
Оценку точности результатов исследования т0 выполняют по следующим формулам [49]:
M a - V |
(40) |
"1) ЛГ(л-1)-1
Кроме того, должны выполняться условия: |
|
|т,--т0|< 0,0025 мм 1 |
|
|т0 -0,05|< 0,0003 мм}' |
(4 2 ) |
Диапазон работы оптического микрометра вычисляют по |
|
формуле |
|
D = 100х0 (мм). |
(43) |
В полевых условиях цену деления барабанчика исследуют на различных расстояниях до рейки и при разной температуре [34].
Поверку главного условия нивелира Н-05 выполняют аналогично поверкам нивелира Н-3. Однако при несоблюдении главного условия его исправляют вращением клиновидного защитного стекла, находящегося перед объективом зрительной трубы, предварительно ослабив стопорный винт [86].
83
Вывод. В результате проведенных исследований нивелира
Н-05 № 2317 получены следующие результаты:
1)цена деления барабанчика оптического микрометра нивелира т0 = (0,0496 ± 0,00398) мм,
2)диапазон работы D = 4,96 мм,
3)люфт передаточного механизма равен 0,005 мм, т.е. условие (36) выполняется.
В целом прибор требует ремонта (необходимо увеличить цену деления барабанчика).
Контрольные вопросы
1. Типы оптических микрометров с ППП, применяемых в геодезических приборах, их устройство и назначение.
2.Смещение луча плоскопараллельной пластинкой (формулы смещения луча).
3.Цена деления шкалы оптического микрометра и методика ее исследования.
4.Методика исследования механизма, наклоняющего ППП.
5.Методика поверки и исправления главного условия и положения сетки нитей нивелира Н-05.
6.Методика проверки плавности вращения оси нивелира.
6. ЭЛЕКТРОННЫЕ НИВЕЛИРЫ: УСТРОЙСТВО, ИССЛЕДОВАНИЯ
ИМЕТОДИКА РАБОТЫ
Внастоящее время большое внимание уделяют цифровым нивелирам.
Их производством занимаются такие известные фирмы, как Trimble, Sokkia, Leica и Topcon [41].
Цифровые нивелиры позволяют свести до минимума субъективные погрешности наблюдателя, накапливать результаты полевых измерений в памяти прибора и передавать их в компьютер. Нивелиры, в обозначении которых приведена буква "Т", позволяют измерять горизонтальный угол и вычислять координаты штрих-кодовой рейки.
Устройство электронного нивелира DINI 10
Оптическая схема электронного нивелира DINI 10 приведена на рис. 77.
Изображение штрих-кодовой рейки (на рис. 77 не показана) получают с помощью объектива 1 одновременно в плоскости сетки нитей 7 и в плоскости сенсорного приемника излучения 10, куб-призма 6 служит для разделения светового потока (при юстировке прибора с помощью коллиматора добиваются одинаковой резкости изображений сетки нитей и приемника излучения), нити обратного шарнирного четырехугольника выполнены в виде тонких лент, объектив 1 закреплен стопорным винтом - его перемещение вдоль оптической оси позволяет юстировать коэффициент нитяного дальномера.
Методика нивелирования на станции цифровым нивелиром DINI 10
Согласно паспортным данным цифровые нивелиры могут быть использованы при нивелировании второго, третьего и четвертого классов точности, обеспечивая при этом высокую производительность работы и возможность хранения и записи информации на ЭВМ.
85
н н ь
Рис. 77. Оптическая схема электронного нивелира DINI 10:
1 - объектив; 2 - |
фокусирующая линза; 3, 4 - |
призмы; 5 - нити; |
6 - куб-призма; 7 - |
сетка нитей; 8 - окуляр; 9 - |
зеркало-компенсатор; |
10 - сенсорный приемник излучения; 11 - воздушный демпфер; 12 - корпус трубы; А, В, С, D - точки закрепления нитей
Рассмотрим методику работы на станции цифровым нивелиром DINI 10 (Trimble):
1.Горизонтировать нивелир и включить его кнопкой "ON/ OFF", на дисплее появится несколько предложений для работы.
2.Нажать кнопку "MENU", зайти в директорию "INPUT"
ив зависимости от класса нивелирования установить следующие параметры:
MAX DIST - максимальное расстояние от нивелира до рейки,
MIN HEIGHT - минимальная высота визирования на рейку, MAX DIFF - максимальная разница в превышениях, по-
лученных в двух приемах,
3.Найти в меню директорию "SET INSTR PARAM" и установить единицы измерения (метры или футы).
4.Через кнопку "INFO" просмотреть общее состояние нивелира.
5.Для начала работы нажать "LINE" и выбрать "NEW LINE"
86
6.С клавиатуры ввести номер хода.
7.Нажать кнопку "ОК".
8. Выбрать методику измерений: BFFB), B F B ( 3 n n 3 F (ЗПЗП), BBFF (ЗЗПП), BF (ЗП); для выбора необходимо нажимать кнопку "MODE", после чего "ОК".
9.Ввести высоту исходного пункта Z=
10.Ввести номер начального репера хода.
11.Ввести код репера (например, его номер в ГГС). Пункты 9-5-11 процессор запрашивает сам. После выпол-
нения п. 11 на экране дисплея будет показана высота начального репера, его номер и подсказка о том, на какую рейку необходимо визировать (например, В I 1).
Для контроля разности плеч необходимо использовать кнопку "DIST", тогда процессор не записывает результат измерений в память и не сбивает программу нивелирования.
12.Визировать на заднюю рейку и нажать кнопку "MEAS".
13.Визировать на переднюю рейку (В Т 2) и нажать кнопку "MEAS". Перед измерением процессор автоматически увеличивает номер точки на 1.
14.Изменить высоту прибора более, чем на 3 см.
15.Визировать на переднюю рейку (F Т 2) - "MEAS".
16.Визировать на заднюю рейку (В I 1) - "MEAS".
17.После контроля перейти на следующий штатив.
При несоблюдении какого-нибудь условия процессор покажет ошибку (например, 323: rod not reable - недостаточная освещенность кодовой рейки, тогда необходимо нажать кнопку "REP", осветить рейку и выполнить повторные измерения). Кроме того, целесообразно разделять номера пунктов хода (например: 1, 2, 3 и т.д.) и промежуточные точки хода (например: 501, 502, 503 и т.д.). В условиях нормального освещения время измерения занимает 2 ^ 4 секунды, при низкой освещенности время измерения увеличивается до 7 секунд. Так как приемник излучения работает в инфракрасном диапазоне спектра излучения, то при искусственном освещении рейки лучше использовать галогенные или вольфрамовые лампы, возможно использование обычного фонарика или лампы накаливания. При этом рейка должна быть равномерно освещена, не должно быть зон с максимальной освещенностью. Если лампа установлена над рейкой, то световой поток должен быть
87
направлен на нижнюю часть рейки, а не на зону измерения. При измерениях против солнца целесообразно изготовить бленду длиной ~ 7 см и надеть ее на объектив. При измерениях по солнцу лучи его могут проникать через окуляр, поэтому окуляр лучше перекрывать (можно головой или туловищем). Особенно при измерениях с инварной рейкой нельзя допускать бликов от рейки или тени на рейке.
18. Закончив последнюю секцию, нажать "END LINE", после чего процессор покажет на экране дисплея невязку в ходе, высоту конечной точки и длину хода.
По указанной выше методике был исследован прибор с инварной и пластиковой штрих-кодовыми рейками [19]. В качестве образцовых средств измерения были использованы лазерный интерферометр "Хьюлетт Паккард" и концевые меры длины второго класса. Результаты исследований двух реек показали, что коротко периодическая внутришаговая погрешность измерения по обеим рейкам при дискретности отсчитывания 0,01 мм составила 1^-2 мм, при этом накопленная погрешность измерения в диапазоне 0 350 мм равнялась 1,2 мм.
Контрольные вопросы
1.Устройство цифрового нивелира DINI 10.
2.Методика работы на станции цифровым нивелиром DINI 10.
7.ИЗУЧЕНИЕ УСТРОЙСТВА ТЕОДОЛИТОВ ТИПА Т2
Цель работы: изучить оптические схемы и отсчетную систему теодолитов Т2, 2Т2, ЗТ2КП, устройство механических узлов (вертикальной осевой системы, горизонтальной оси вращения зрительной трубы, наводящего и закрепительного винтов алидады горизонтального круга и зрительной трубы и др.), порядок неполной разборки и сборки теодолитов, отличия в разборке указанных выше приборов, основные неисправности теодолитов и методы их устранения, выявить неисправности и произвести частичную разборку и сборку, в отчете описать методику их исправления.
Приборы и принадлежности: теодолит типа Т2, отвертки, шпилька, вата, спирт, бензин, ветошь, лист плотной бумаги.
Содержание и порядок выполнения работы
Изучаемые теодолиты содержат порядка 70 оптических деталей [49] и являются сложными оптико-механическими приборами. На рис. 78 показана оптическая схема теодолита Т2 (зрительная труба - поз.36 39; отсчетная система горизонтального круга - поз. 1, 2, 26 -г- 35, 17 -н 25; отсчетная система вертикального круга - поз. 1 -ь 25; оптический центрир - поз. 41 -S- 44). На рис. 79 показана оптическая схема теодолита ЗТ2КП. Принципиально оптическая схема теодолита 2Т2 мало отличается от оптической схемы теодолита Т2: в оптическом центрире теодолита Т2 призма 42 (см. рис. 78) поворачивает направление хода лучей на 90°, у теодолита 2Т2 она заменена на пентапризму, объектив зрительной трубы теодолита Т2 состоит из двух склеенных компонентов, объектив теодолита 2Т2 состоит из двух одиночных и одной склеенной пары линз [31, 65], поле зрения теодолита 2Т2 аналогично полю зрения теодолита ЗТ2КП (см. рис. 81). Сетка нитей теодолитов Т2 и 2Т2 показана на рис. 41, в. На рис. 80 показано поле зрения отсчетного микроскопа теодолита Т2. При отсчитывании необходимо соблюдать следующий порядок: вращая барабанчик
89
Рис. 78. Оптическая схема теодолита Т2:
1 - зеркало подсветки; 2 - иллюминатор; 3, 4, 11, 14, 15, 26, 33, 42, 45, 46, 48 - призмы; 5 - вертикальный круг;
6, 9 - призмы мостика вертикального круга; 7, 8 - микрообъективы мостика вертикального круга; 10 - призма со светофильтром; 12, 13 - микрообъективы; 16 -ромб-призма; 17, 18, 19, 20 - оптические клинья; 21 - блок призм;
22 - шкала; 23 - пентапризма; 24 - объектив микроскопа; 25 - окуляр; 27 - призма с коллективом; 28 - горизонтальный круг; 29, 32 - призмы мостика
горизонтального круга; 30, 31, 34, 35 - микрообъективы; 36 и 37 - объектив зрительной трубы; 38 - фокусирующая линза; 39 - окуляр;
40 - защитное стекло; 41 - объектив центрира; 43 - сетка центрира; 44 - окуляр центрира; 47 - призма-лупа; 49 - линза
90
Рис. 79. Оптическая схема теодолита ЗТ2КП:
зрительная труба: 43 - объектив; 44 - фокусирующая линза; 45 - оборачивающая система; 46 - сетка нитей; 47 - окуляр;
отсчетная система оптического микрометра горизонтального |
круга: |
|
1 , 3 - зеркала подсветки; 2 - иллюминатор; 4, 12, 20 - коллективы; |
||
5,13 — призмы БР-1800; 6 - горизонтальный круг; 7 - |
призма АкР-90°; |
|
8> 10, 14, 15, 24 - микрообъективы; 9, 23 - диафрагмы; И, |
18 - призмы АР-90°; |
|
16 - неподвижные клинья; 17 - подвижные клинья; 19 - клин; 21 - шкала; |
||
22 - пентапризма; 25 - окуляр; отсчетная система оптического |
микрометра |
|
вертикального круга: 1,48 - зеркала подсветки; 2 - иллюминатор; 32, 34, 38, 40, 24 - микрообъективы; 18, 31, 49 - призмы АР-90°; 37 - ППП;
29 - линза; 39 - блок призм (призма БС-0° и призма АР-90°); 41 - призма АР-90° со светофильтром; 42 - призма БС-0°; 35 - призма-компенсатор АкР-90°;
36 - призма; 26 - вертикальный круг; 20, 27 - коллективы; 28, 30 - призмы БР-1800; 23, 33 - диафрагмы; оптический центрир (рис. 82): окуляр
и длиннофокусная линза на схеме не показаны; 50 - призма; 51объектив
91
оптического микрометра, совместить изображения штрихов двух противоположных участков лимба в левом окне, слева сверху вниз направо определить отсчеты градусов, отличающиеся на 180°(на рис. 80 - 38° и 218°), по верхней шкале отсчитать градусы (38°), отсчитать количество делений, определяющих десятки минут, до противоположных градусов (20"), в правом окне напротив неподвижного индекса-нити справа отсчитать количество минут (2'), в том же окне слева отсчитать количество оцифрованных десятков секунд, от них до
Рис. 80. Поле зрения отсчетного микроскопа теодолита Т2
Рис. 81. Поле зрения теодолитов 2Т2 и ЗТ2КП
92
неподвижного индекса количество секунд и оценить долю наименьшего деления на глаз, равную количеству десятых долей секунды.
В теодолите ЗТ2КП (или 2Т2) при отсчитывании необходимо выполнить следующие действия: барабанчиком оптического микрометра совместить штрихи противоположных участков лимба в нижнем левом окне (см. рис. 81), в левом верхнем окне напротив шкалы десятков минут прочитать количество градусов (175°), спроецировав середину градусного числа на шкалу десятков минут, прочитать количество десятков (3), в правом окне напротив неводвижной нити-индекса слева прочитать количество минут (4), в правом окне справа прочитать оцифрованные десятки секунд (10), секунды (5) и оценить на глаз десятые доли секунды (0). Необходимо помнить: при отсчетах, близких к целому количеству десятков минут, может возникнуть неоднозначность, поэтому при определении десятков необходимо определить минуты и, если количество минут 1 - ^ 2 - считать десятки под градусами, если количество минут 8 -s- 9 — считать предыдущее количество десятков.
При изучении оптических схем теодолитов целесообразно разделить их на четыре составные части: зрительную трубу, отсчетный микроскоп алидады горизонтального круга, отсчетный микроскоп вертикального круга, оптический центрир (рис. 79).
В теодолите ЗТ2КП в схеме оптического центрира использована равнобедренная призма типа БкР-90°. Объектив зрительной трубы выполнен четырехлинзовым, кроме того, для получения прямого изображения в схему введена оборачивающая система-призма Аббе (поз. 45 на рис. 79).
Ход лучей в отсчетном микроскопе алидады горизонтального круга (см. рис. 79)
Ход лучей в отсчетном микроскопе алидады горизонтального круга у теодолитов типа Т2 ЗТ2КП практически одинаков.
Параллельный пучок света падает на зеркало 1(в полевых условиях наибольшее освещение дает фон неба) и от него на иллюминатор 2, иллюминатор имеет матовое покрытие, поэтому после него в поперечном сечении пучка света наблюда-
93
Рис. 82. Принципиальная оптическая схема центрира теодолитов ЗТ2КП; ЗТ2КА и ЗТ5КП:
1 - длиннофокусная линза; 2 - объектив; 3 - призма; 4 - коллектив-сетка; 5 - окуляр
ется одинаковая освещенность по полю. Далее, отразившись от зеркала 3 и призмы БР-1800 5 с коллективом 4, пучок света освещает лимб алидады горизонтального круга 6. Цена деления лимба 20', штрихи бифилярные, сплошная оцифровка градусов в пределах 360°. Промежуточное изображение штрихов и градусов образуется с помощью призм 7, 11 и микрообъективов 8, 10 в масштабе 1:1 на противоположном участке лимба. Далее полученное промежуточное изображение лимба и противоположный участок лимба с помощью микрообъективов 14 и 15 через пары неподвижных 16 и подвижных 17 клиньев и призму 18 проецируется на разделительную границу блока 1 8 - 2 0 . Пентапризма 22 и микрообъектив 24 необходимы для рассматривания изображений круга в фокальной плоскости окуляра 25.
Вид снизу теодолита ЗТ2КП приведен на рис. 84.
Ход лучей в клиньях оптического микрометра показан на рис. 83.
В оптическом микрометре подвижная пара клиньев жестко соединена со шкалой. При перемещении подвижных клиньев изображения частей круга перемещаются навстречу друг
94
Рис. 83. Схема хода лучей в клиньях оптического микрометра
другу, проходя равные расстояния, поэтому при цене деления лимба 20' достаточно диапазона шкалы 10'.
Оптический мостик (см. рис. 79, поз. 7 - 1 1 ) включает микрообъектив (поз. 8 и 10) с увеличением, равным одному
крату. Если они разъюстированы, то возникает разность ренов Л г = гв " г„-
Микрообъективы 14 и 15 отсчетного микроскопа передают изображения в масштабе, соответствующем размеру шкалы 21, в противном случае возникает средний рен.
Принцип формирования изображений от вертикального круга теодолитов Т2 и 2Т2 аналогичен рассмотренному выше для горизонтального круга.
95
4
7
8
3
Рис. 84. Теодолит ЗТ2КП (вид снизу):
1, 2, 3 - винты крепления низка к алидаде; 4 - винт; 5, 6 - регулировочные винты призмы АР-180°; 7, 8 - регулировочные винты призмы подсветки АР-180°;
9 - защитная крышка центрира; 10 - хвостовик; 11, 12 - заглушки
Переключение кругов осуществляют введением в ход лучей ромб-призмы 16 (см. рис. 53) или призмы 41 (см. рис. 54). Совмещение штрихов лимба барабанчиком оптического микрометра осуществляют после совмещения изображений концов пузырька цилиндрического уровня при вертикальном круге. В оптическую схему отсчетного микроскопа вертикального круга теодолита ЗТ2КП введен призменный компенсатор (призма с крышей АкР-90°), который обеспечивает постоянным отсчет по вертикальному кругу при визировании на одну цель при случайных наклонах оси вращения прибора. Диапазон работы компенсатора ± 4', погрешность компенсации не более 0,871'.
Наличие компенсатора повышает производительность работы, так как нет необходимости при отсчитывании по вертикальному кругу совмещать концы пузырька контактного уровня.
Кроме того, для удобства отсчитывания десятков минут в теодолите ЗТ2КП предусмотрена возможность установки начального нулевого отсчета. Для этого вращением маховика, расположенного на колонке теодолита, изначально совмещают изображения противоположных участков лимба. ППП 37 и отрицательная полулинза 29 расположены в устройстве юстировки места зенита (см. рис. 79).
96
Рассмотрим оптическую схему зрительной трубы теодолита ЗТ2КПА с автоколлимационным окуляром (рис. 85). Здесь сетка нитей нанесена на полупрозрачной грани куб-призмы 4.
S |
6 |
2 |
1 |
3 |
4 |
7 |
в |
ш |
Сетка нитей / |
167,68' |
Рис. 85. Зрительная труба теодолита ЗТ2КПА:
1 - источник излучения (лампа); 2 - |
сферическое зеркало; 3 - светофильтр; |
4 - куб-призма; 5 - объектив; 6 - |
фокусирующая линза; 7 - окуляр; |
8 - выходной зрачок
Юстировка оптических систем теодолитов требует специальных навыков, поэтому разбирать теодолит исполнителю не рекомендуется. Однако, при необходимости, инженер-гео- дезист может выполнить ряд юстировок и мелкий ремонт. При этом, кроме правил, применяемых при разборке нивелира (см. раздел 3), следует соблюдать следующие условия:
не производить разборку теодолита на открытом воздухе; исключить попадание на поверхность оптических деталей
пыли, масла и песчинок; перед чисткой тщательно осмотреть вату и поверхности
оптических деталей; при снятии и установке оптических деталей исключить при-
косновение к рабочей поверхности детали или сдвиг другой оптической детали;
чистку оптических деталей производить круговыми движениями от центра детали к краям, при этом, для сохранения нанесенных покрытий, нельзя прикладывать чрезмерных усилий; строго следить за сохранностью водоотталкивающей за-
мазки, обеспечивающей герметичность прибора в целом.
97
Порядок неполной разборки теодолитов
Неполную разборку теодолитов выполняют только в случае обнаружения неисправностей и при смазке осевых систем, в сезонной смазке теодолиты не нуждаются [91], необходимость смазки выявляется только при температуре Ю....30°С. Кронштейны с оптическими деталями можно отделять, если они заштифтованы (особенно при разборке симметричных деталей), на сопряженных деталях полезно делать метки мягким карандашом или краской.
При разборке необходимо соблюдать порядок расположения деталей на монтажном столе.
На рис. 86 изображены принципиальные схемы вертикальной оси теодолитов технической точности типа ТЗО (а), вертикальной полукинематической оси теодолитов ЗТ2КП, ЗТ2КПА
(б)и ЗТ5КП (в).
Втеодолитах 2Т5К и Т2 разборку вертикальной оси необходимо производить в следующем порядке:
положить теодолит на боковую крышку с зеркалом подсветки и, поворачивая подставку, вывинтить четыре крайние, симметрично расположенные в низке теодолита, винта; придерживая корпус, поставить теодолит на подставку и, взяв-
а |
б |
в |
Рис. 86. Осевые системы теодолитов:
1 - ось; 2 - втулка-бакса; 3 - шарикоподшипник
98
шись за колонку, осторожно извлечь вертикальную ось из баксы; при тяжелом ходе горизонтального круга необходимо после извлечения вертикальной оси из баксы вывинтить три винта крепления втулки, расположенные снаружи под углом 120°, и, взявшись за шестерню горизонтального круга, снять втулку с баксы,
выполнить чистку и смазку оси (не допускать излишек масла), осуществить сборку в обратном порядке.
Для смазки используют масло типа 132-08 (ГОСТ 1837573), из густых смазок - АЦ-1 или Дельта (ТУ 38.101 833-80), или ОКБ 122-7 (ГОСТ 18179-72).
На данной стадии разборки необходимо знать устройство осевой системы лимба и алидады, наводящего и закрепительного винтов, перестановки лимба, а также назначение призм полного внутреннего отражения, расположенных в низке, их юстировку, методы исследования вертикальных осей, метод крепления горизонтального круга, методы исправления эксцентриситета лимба и устройство оптического центрира, описанные в литературе [30, 31]. Схема расположения вертикальной оси теодолита ЗТ2КП показана на рис. 87.
Рис. 87. Схема расположения вертикальной оси теодолита ЗТ2КП:
1 - втулка; 2 - ось; 3 - горизонтальный круг; 4 - оправа оптического мостика; 5, 10 - призмы полного внутреннего отражения; 6, 9 - призмы АР-90°;
7, 8 - микрообъективы
99
Порядок разборки вертикальной оси теодолита ЗТ2КП:
снять трибку перестановки горизонтального круга, вывинтив три винта на ней, затем, вывинтив четыре винта, извлечь механизм поворота горизонтального круга,
сняв боковую крышку с зеркалом подсветки, отсоединить провод подсветки, положить теодолит на бок, вывинтить три винта, скрепляющие низок с колонкой,
вывинтить колпачок, ослабив предварительно стопорный винт, ослабить три стопорных винта оправы длиннофокусной линзы центрира и снять оправу вместе с крышкой с оси,
поддерживая низок, поставить теодолит на подставку, закрепить его и, вращая колонку, осторожно извлечь вертикальную ось из баксы, при этом особое внимание обратить на сохранность насыпного подшипника.
Основные неисправности теодолита ЗТ2КП и их устранение
Зеркало подсветки отсчетного микроскопа не сохраняет приданного положения. Исправить двумя регулировочными винтами, сжимая прорезь в оправе зеркала.
Разность верхнего и нижнего рена горизонтального круга выше допустимого значения. Исправить одновременно с устранением параллакса перемещением микрообъективов (поз. 8 и 10, см. рис. 79) вдоль прорези, сняв предварительно окуляр оптического центрира и ослабив винты крепления микрообъективов.
Средний рен горизонтального круга выше допустимого значения. Исправить вместе с параллаксом между изображениями штрихов лимба и шкалы микрометра перемещением линз микрообъектива (поз. 14 и 15 см. рис. 79).
Для этого необходимо снять крышку с головкой микрометра, предварительно извлечь пружинное кольцо, затем установить окуляр микрометра на резкое изображение грани, разделяющей изображения круга, и, перемещая микрообъективы, устранить параллакс и средний рен. При исправлении среднего рена обе линзы микрообъективов 14 и 15 приблизить к горизонтальному кругу, если рен положительный, и удалить, если рен отрицательный. После исправления рена его проверить по методике, описанной в разделе 10.
Исправление положения цилиндрического уровня при алидаде горизонтального круга. Исправление выполнить, если при
100
поверке пузырек уровня сместился более, чем на одно деление, котировочным винтом уровня, расположенным на колонке под наводящим винтом вертикального круга, возвращая пузырек на половину отклонения.
В поле зрения микроскопа наблюдается смещение изображений штрихов лимба относительно разделительной линии. Исправить, ослабив винты в низке разворотом призмы (поз. 5, см. рис. 79).
Наблюдается затемнение углов поля зрения отсчетного микроскопа. Исправить перемещением призмы 5 (см. рис. 79), предварительно ослабив винты.
Исправление коллимационной погрешности. Коллимационную погрешность порядка Г ч- 2' исправить смещением сетки нитей зрительной трубы. Для этого необходимо снять колпачок окуляра, ослабить верхний вертикальный винт, барабанчиком оптического микрометра установить правильный отсчет, наводящим винтом горизонтального круга совместить штрихи, горизонтальными винтами привести изображение предмета в перекрестие сетки нитей и закрепить вертикальный винт. При большей коллимационной погрешности исправить ее клиновым кольцом зрительной трубы специальным ключом. При этом после юстировки необходимо проверить место зенита.
Исправление места зенита. Для исправления места зенита теодолит горизонтировать, установить по шкале микрометра отсчет, равный круг лево минус место зенита, после чего совмещение штрихов выполнить специальным ключом. В небольших пределах исправление можно выполнить смещением сетки нитей. Для исправления места зенита в полевых условиях в теодолите ЗТ2КП предусмотрено специальное юстировочное устройство, регулировочный винт которого расположен на колонке под вертикальным кругом. Устройство состоит из специально подобранных длиннофокусной линзы 29 и ППП 37 (см. рис. 81), расположенных на вращающемся секторе. Линза 29 и ППП 37 расположены таким образом, что перекрывают лучи, идущие от разных частей вертикального круга. При повороте сектора юстировочным винтом изображения частей круга смещаются навстречу друг другу с одинаковой скоростью.
Юстировка коллиматорного визира. Необходимо ослабить четыре винта крепления визира, навести зрительную
101
трубу на марку, развернуть визир по азимуту до совмещения его вертикальной нити с перекрестием марки и зажать винты крепления.
Юстировка оптического центрира. Юстировку можно выполнить двумя методами: ослабить два винта крепления окуляра центрира и сместить на половину смещения изображение точки, повернуть теодолит до тех пор, пока не появятся в отверстиях хвостовика юстировочные винты длиннофокусной линзы, затем, вывинчивая один винт и завинчивая противоположный винт, сместить изображение на половину отклонения. Предварительно необходимо ослабить один из винтов, расположенных под углом 90°.
Юстировку компенсатора разрешают выполнять только опытному специалисту.
Контрольные вопросы
1.Устройство механических узлов теодолитов типа Т2.
2.Порядок неполной разборки теодолитов типа Т2.
3.Неисправности теодолитов типа Т2 и их устранение.
4.Оптическая схема отсчетной системы теодолитов типа Т2 вертикального и горизонтального кругов, ход лучей в отсчетной системе.
8.ИССЛЕДОВАНИЕ ПОГРЕШНОСТИ СОВМЕЩЕНИЯ ИЗОБРАЖЕНИЙ
ПРОТИВОПОЛОЖНЫХ ШТРИХОВ ЛИМБА ГОРИЗОНТАЛЬНОГО КРУГА ТЕОДОЛИТОВ ТИПА Т2
Цель работы: практическое освоение принципов отсчитывания по горизонтальному и вертикальному кругам теодолитов Т2, 2Т2, ЗТ2КП, исследование погрешности совмещения изображений противоположных штрихов лимба горизонтального круга теодолитов типа Т2.
Приборы и принадлежности: теодолиты Т2,2Т2,ЗТ2КП.
Содержание и порядок выполнения работы
Исследование погрешности совмещения штрихов лимба теодолита ЗТ2КП
Порядок отсчитывания с помощью оптического микрометра описан в разделе 7 [26, 36, 66]. При исследованиях лимб переставлять через 15°, на каждой установке выполняя по два совмещения, при этом отсчитывать только по шкале микрометра. Результаты измерений записывать в табл. 8.
Совмещение противоположных штрихов лимба необходимо выполнять, вращая барабанчик оптического микрометра на увеличение отсчета.
|
|
|
Т а б л и ц а 8 |
Дата: 13.10.01 г. |
|
Наблюдатель: Чижова У.Ю. |
|
Установка |
Отсчет по микрометру |
|
|
лимба, |
Совмещение 1, |
Совмещение 2, |
совм. 1 совм.^> |
о |
// |
// |
// |
0 |
0,0 |
-0,6 |
+0,6 |
15 |
26,7 |
24,8 |
+ 1,9 |
30 |
17,1 |
15,9 |
+ 1,2 |
45 |
27,0 |
27,7 |
-0,7 |
60 |
21,0 |
22,5 |
- 1 , 5 |
103
|
|
|
Окончание табл. 8 |
Установка |
Отсчет по микрометру |
|
|
лимба, |
Совмещение 1, |
Совмещение 2, |
совм. 1 совм.2> |
о |
|
// |
|
75 |
30,0 |
30,5 |
-0,5 |
90 |
39,2 |
39,8 |
-0,6 |
105 |
28,9 |
28,2 |
+0,7 |
120 |
4,2 |
6,0 |
-1,8 |
135 |
38,3 |
39,2 |
-0,9 |
150 |
34,8 |
35,3 |
-0,5 |
165 |
2,2 |
1,9 |
+0,3 |
180 |
15,0 |
15,2 |
-0,2 |
195 |
15,4 |
16,7 |
-1,3 |
210 |
27,1 |
26,9 |
+0,2 |
225 |
7,3 |
7,2 |
+0,1 |
240 |
38,9 |
37,9 |
+ 1,0 |
255 |
3,0 |
1,8 |
+ 1,2 |
270 |
56,0 |
56,1 |
-0,1 |
285 |
19,2 |
18,2 |
+ 1,0 |
300 |
37,8 |
37,6 |
+0,2 |
315 |
30,7 |
29,1 |
+1,6 |
330 |
43,6 |
42,5 |
+ 1,1 |
345 |
16,3 |
15,0 |
+ 1,3 |
Шсов = 0,59"
Контроль: разность отсчетов при двух совмещениях не должна превышать
2/ \d i < 2 т сов л/2), |
(44) |
здесь dj - разность отсчетов при двух совмещениях |
[49]. |
Среднюю квадратическую погрешность совмещения шсов вычислить из двойных измерений по формуле:
здесь п = 24 - количество установок лимба.
Каждый наблюдатель выполняет полную программу измерений. Для теодолитов типа Т2 значение средней квадратической погрешности совмещения не должно превышать
104
т с о в |
= |
Если в |
разностях d{ |
имеет место |
систематиче- |
|
ская |
погрешность |
то |
вычисления |
выполнить по |
||
формуле: |
|
|
|
|
|
|
|
|
|
к |
7 |
] |
(46) |
|
|
|
' 2(п |
-1)' |
||
|
|
|
|
|||
где
(47)
При исследовании погрешности совмещения штрихов вертикального круга теодолитов типа Т2 наблюдения выполнить в секторе круга от 60 до 120° через каждые 5° [48, 49, 81].
Вывод: теодолит ЗТ2КП № 26887 имеет погрешность совмещения шсов = 0,59" > шс о в д о п = 0,5".
Контрольные вопросы
1.Порядок отсчитывания в теодолитах Т2, 2Т2, ЗТ2КП.
2.Методика измерений при исследовании погрешности совмещения.
3.Обработка результатов измерений при исследовании погрешности совмещения.
9.ПОВЕРКИ, ИССЛЕДОВАНИЯ
ИЮСТИРОВКА ВЗАИМНОГО РАСПОЛОЖЕНИЯ ОСНОВНЫХ ОСЕЙ
ТЕОДОЛИТОВ ТИПА Т2 И Т5
Цель работы: практическое освоение методик поверки и юстировки теодолитов.
Приборы и принадлежности: теодолиты типа Т2, Т5, набор отверток, шпилька.
Содержание и порядок выполнения работы
Поверки и юстировка расположения основных осей теодолитов
Взаимное расположение отдельных узлов теодолита должно удовлетворять соблюдению основных геометрических условий. Некоторые из поверок, согласно паспортам на приборы [90, 91], необходимо выполнять ежедневно, при этом перед выполнением поверки прибор и вспомогательное оборудование во избежание местных напряжений в оптических и механических деталях, особенно в зимнее время, необходимо вынимать из футляра не ранее, чем через 30'. Поверки подробно описаны в [31, 35, 45, 46, 47, 85].
Поверка № 1. Внешний осмотр прибора. При внешнем осмотре выявляются комплектность прибора, маркировка, наличие механических повреждений на корпусе и оптических деталях, равномерность освещения и чистота поля зрения отсчетного микроскопа, проверяется плавность и легкость вращения подъемных и наводящих винтов, работа зажимных устройств, фокусирующего устройства и барабанчика оптического микрометра, сохранность уровней, устойчивость подставки и т.д.
Оптические детали теодолита имеют просветляющие покрытия, особенно чувствительные к механическим воздействиям. При обнаружении пыли необходимо сдуть ее (можно сжатым воздухом из резинового баллончика), после чего легким
106
движением сухой салфеткой удалить пятна. Жирные пятна (например, следы пальцев) смыть влажным тампоном, смоченным спирто-эфирной смесью (50% спирта + 50% эфира или 60% спирта + 40% эфира), и протереть поверхность легкими вращательными движениями от центра к краю.
Поверка № 2. Условие: ось цилиндрического уровня при
алидаде горизонтального круга должна быть перпендикулярна оси вращения теодолита.
Выполнение поверки: 1) уровень установить по направлению двух подъемных винтов подставки и вращением их в противоположные стороны вывести пузырек на середину, 2) повернуть алидаду на 90° и третьим винтом вернуть пузырек на середину, снова установить уровень по направлению первых двух подъемных винтов и при необходимости ими поправить положение пузырька уровня, 3) повернуть алидаду на 180°, если пузырек уровня отклонился от среднего положения, вернуть его на половину исправительным винтом и отгоризонтировать прибор, для теодолитов типа Т2 допускается отклонение пузырька не более 0,5 деления уровня, 4) поверку обязательно повторить.
Поверка № 3. Выявление устойчивости подставки.
Выполнение поверки: 1) после закрепления теодолита на кронштейне и горизонтирования его, зрительную трубу навести на марку, 2) слегка приложив к подставке крутящее усилие в горизонтальной плоскости, сместить изображение цели примерно на половину ширины биссектора сетки нитей, после снятия усилия изображение марки должно вернуться в прежнее положение, 3) повторить п.2, прикладывая усилие в противоположном направлении. При наличии остаточных смещений выполнить юстировку.
Юстировка: а) проверить закрепление трех винтов крепления пружины трегера к его основанию, б) отрегулировать ход подъемных винтов, для чего вывинтить подъемный винт до совпадения отверстий под шпильку во втулке и регулировочной гайке, вставить шпильку и поворачивать вместе с ней
гайку подъемного винта.
Поверка № 4. Условие: вертикальная нить сетки нитей
зрительной трубы в отгоризонтированном приборе должна быть параллельна вертикальной оси вращения, горизонтальная нить - ей перпендикулярна.
107
Выполнение поверки: 1) по цилиндрическому уровню привести вертикальную ось в отвесное положение, 2) выбрать удобную для наведения точку и, вращая наводящим винтом по азимуту, убедиться в том, что изображение точки не сходит с горизонтальной нити сетки более, чем на три толщины нити (при наличии отвеса поверку выполнить по вертикальной нити).
Юстировка: а) теодолит ЗТ2КП - сняв колпачок, ослабить четыре крепежных винта оправы, повернуть окуляр так, чтобы горизонтальная нить стала горизонтальной, закрепить винты и повторить поверку; б) теодолит 2Т5КП - вывинтить два стопорных винта на колпачке, вывинтить окуляр зрительной трубы вместе с колпачком, снова завинтить окуляр (без колпачка), ослабить четыре винта крепления оправы окуляра и поворотом оправы установить горизонтальную нить сетки, затем закрепить оправу окуляра и повторить поверку, затем вывинтить окуляр, поставить колпачок на место, при этом ограничитель хода на колпачке должен обеспечивать ход окуляра в обе стороны при нормальном зрении.
Поверка № 5. Исследование коллимационной погрешности. Условие: визирная ось зрительной трубы должна быть
перпендикулярна оси вращения зрительной трубы.
Выполнение поверки: 1) зрительную трубу навести на удаленную цель, расположенную примерно на уровне горизонта прибора (отклонение < 2°), 2) при круге "лево" (при этом установить отсчет, близкий к нулю) отсчитать по горизонтальному кругу - JI1? 3) перевести трубу через зенит и при наведении на ту же точку отсчитать по горизонтальному кругу - П^ Разность двух отсчетов в первом приеме должна быть равна ±(180° ± 15") [92], 4) освободить закрепительный винт подставки, повернуть алидаду на 180° и винт закрепить, 5) снова выполнить п. 2 и 3, отсчитав соответственно Jl2 и П2 - второй прием; разность значений коллимационной погрешности между приемами при выполнении поверки теодолитов типа Т2 не должна превышать 6" (не путать с 8" при полевых измерениях) [92], для теодолитов типа Т5 < 15" [91]. Если среднее значение из приемов для теодолита типа Т2 больше, чем 15", выполнить юстировку.
Для этого необходимо вычислить правильный отсчет П'= = П + С и по правилам, изложенным в разделе 6, выполнить юстировку.
108
Поверка № 6. Проверка места нуля в теодолитах типа Т5, места зенита в теодолитах типа Т2. Условие: место
нуля (место зенита) должно быть известно (равно или приведено близко к нулю (90°)).
Выполнение поверки: 1) зрительную трубу при круге "лево" навести на удаленную точку, расположенную примерно на уровне горизонта прибора, 2) в теодолитах с уровнем при вертикальном круге совместить концы пузырька контактного уровня, в теодолитах с компенсатором - проверить работоспособность компенсатора, 3) отсчитать по вертикальному кругу (в теодолитах с двухсторонней системой отсчитывания предварительно совместив штрихи противоположных участков лимба) - отсчет JI1? 4) перевести зрительную трубу через зенит, навести зрительную трубу на ту же точку, проверить совмещение концов пузырька или штрихов лимба и отсчитать значение П1? 5) место нуля вычислить по формуле: МО = (Л! + П{ + 180°) / 2, место зенита - по формуле: MZ = ^ + rij ± 180°) / 2, при этом к отсчету, меньшему 90°, следует прибавить 360° (для теодолитов 2Т5, 2Т5К, 2Т5КП место нуля вычисляется по формуле: МО = (Л + П) / 2, при этом к отсчетам, меньшим 90°, 360° прибавлять не нужно). Место нуля исследуют несколько раз и вычисляют среднее значение. Разность между значениями МО в приемах не должна превышать 15". Если же среднее значение МО (MZ) > 15", необходимо выполнить юстировку прибора. Правила юстировки описаны в разделе 7.
Поверка № 7. Поверка наклона оси вращения зрительной трубы. Условие: ось вращения зрительной трубы должна
быть перпендикулярна вертикальной оси вращения прибора.
Выполнение поверки: 1) установить теодолит на расстоянии 5 + 10 метров от стены и под углом 40 + 50° при круге "лево" визировать на хорошо видимую марку, 2) наклонить зрительную трубу примерно на уровень горизонта прибора и отметить проекцию марки, 3) навести на ту же марку при круге "право" и снова найти ее проекцию на уровне горизонта прибора, 4) расстояние между проекциями не должно быть более ширины биссектора, иначе требуется юстировка.
Юстировку выполняют только в условиях мастерской путем разворота одной из лагер горизонтальной оси, имеющей эксцентричность относительно внутреннего посадочного диаметра.
109
Поверка № 8. Поверка оптического центрира. Условие:
визирная ось оптического центрира должна совпадать с вертикальной осью вращения теодолита.
Выполнение поверки: поверку выполнить на штативе, укрепив под ним марку, при этом при вращении алидады изображение марки не должно отклоняться более, чем на половину радиуса малой окружности, иначе требуется юстировка.
Юстировку выполнять согласно правилам, изложенным в
разделе 7.
Поверка № 9. Поверка оптических визиров. Условие: ви-
зирные оси оптических визиров должны быть параллельны визирной оси зрительной трубы.
Выполнение поверки: перекрестие визира навести на удаленную цель, затем изображение визирной цели совместить с перекрестием сетки нитей. Если при двух совмещениях, как по азимуту, так и по вертикали, смещение превышает 15', то необходима юстировка (см. раздел 7).
Исследование теодолитов типа Т2
Исследование углового расстояния биссектора сетки нитей
Угловое расстояние биссектора рбис вычисляют по формуле:
Рбио |
(48) |
где L - расстояние от объектива до горизонтально расположенной миллиметровой линейки в мм, at - отсчеты по проекциям нитей на миллиметровую линейку, р" = 206265".
Среднюю квадратическую погрешность визирования вычислить как [70]:
(49)
12 '
Исследование цены деления цилиндрического уровня
Для теодолитов типа Т2 ампула цилиндрического уровня должна иметь номинальное значение цены деления, равное 15" [30]. Изменение цены деления в соответствии с ГОСТ 2386-73 допускается в пределах 13,5" -s- 16,5". В процессе эксплуата-
110
ции прибора возможны деформации ампулы из-за температурных изменений, "старения" ампулы и др. и, как следствие, изменение радиуса кривизны ее рабочей поверхности на разных участках.
Уровни, имеющие меньшую цену деления, могут привести к неоправданным затратам времени при горизонтировании прибора, а уровни, имеющие большую цену деления, приводят к дополнительной погрешности при измерениях.
Исследование цилиндрического уровня может быть выполнено на экзаменаторе или методом наклонного лимба [70].
При исследовании цены деления методом наклонного лимба необходимо: 1) прибор установить на кронштейне и отгоризонтировать, при этом один из подъемных винтов должен располагаться в коллимационной плоскости зрительной трубы, 2) зрительную трубу навести на удаленную точку и отсчитать по вертикальному кругу Р1? 3) зрительную трубу наводящим витом наклонить на угол v = 20" + 40", при этом отсчет по вертикальному кругу будет равен Ро = Pi ~ v> 4) подъемным винтом, лежащим в коллимационной плоскости зрительной трубы, снова навести зрительную трубу на ту же точку, 5) алидаду теодолита поворачивать до тех пор, пока пузырек уровня не займет положение 1 (рис. 88), при этом отсчитать по горизонтальному кругу а1? 6) алидаду поворачивать далее до положения 2 пузырька уровня и отсчитать по горизонтальному кругу а2, 7) цену деления уровня на данном участке вычислить по формуле:
т = |
АaV |
(50) |
|
рп |
|
|
|
где Аа - разность отсчетов по горизонтальному кругу, п - количество делений, на которое переместится пузырек уровня (на рис. 88 п = 5).
положение 1 |
положение 2 |
Рис. 88. К исследованию цены деления цилиндрического уровня
111
Исследование увеличения зрительной трубы
Увеличение зрительной трубы V вычисляют как отношение входного диаметра DBX (как правило диаметр оправы объектива) к выходному диаметру (видимый диаметр пятна на расстоянии 2 3 мм от окуляра при фокусировке зрительной трубы на удаленный предмет измеряют с помощью динаметра):
Dex |
, |
ч |
(51) |
V = — — |
( к р а т ) . |
||
ивых |
|
|
|
Исследование угла поля зрения зрительной трубы
Исследование выполняется наведением на удаленную точку диаметрально расположенными краями поля зрения. Разность отсчетов PJ И Р2 равна углу поля зрения зрительной трубы.
Контрольные вопросы
1.Условия и методы выполнения поверок теодолитов.
2.Методы юстировки отклонений рассмотренных выше геометрических условий.
3.Методы исследования цены деления цилиндрических уровней, угла поля зрения и увеличения зрительных труб.
10. ИССЛЕДОВАНИЕ РЕНА ШКАЛОВОГО МИКРОСКОПА ТЕОДОЛИТОВ
2Т5К (ЗТ5КП), 4Т15П
Цель работы: изучить устройство теодолитов 2Т5К,ЗТ5КП и 4Т15П, исследовать двумя методами рен шкалового микроскопа горизонтального круга теодолитов 2Т5К или ЗТ5КП.
Приборы и принадлежности: теодолиты 2Т5К (ЗТ5КП), 4Т15П, ЗТ2КП.
Содержание и порядок выполнения работы
Оптическая схема теодолита 2Т5К
Теодолит ЗТ5КП имеет увеличение зрительной трубы 27х, у теодолита ЗТ2КП увеличение зрительной трубы 30х. Оптические схемы зрительных труб одинаковы. В теодолите 2Т5К применен шкаловой микроскоп с односторонней системой отсчитывания по кругам. Поле зрения шкалового микроскопа теодолита 2Т5К показано на рис. 89.
На рис. 90 показано поле зрения микроскопа теодолита ЗТ5КП, оптическая схема прибора приведена на рис. 91.
Здесь изображения штрихов горизонтального и вертикального кругов проецируются в поле зрения по двум независимым каналам.
Ход лучей в системе горизонтального круга: после иллюминатора 6 (см. рис. 91) лучи проходят призму 7, затем ромбпризму 8, линзу-коллектив 9 и параллельным пучком освещают горизонтальный круг 10. Изображения штрихов горизонтального круга с помощью призмы 11 и объективов 12 и 13 формируются в плоскости шкалы плоской поверхности лин- зы-коллектива 15, приклеенной к призме 14.
Вертикальный круг освещается с помощью ромб-призмы 20 и призмы 22. К блоку призм 14 приклеены светофильтр и рассеивающая линза. Изображения штрихов вертикального круга через призмы 23, 25, 26 и 14, объективы 24 и 27 также проецируются на плоскую поверхность линзы-коллектива 15.
113
Рис. 89. Поле зрения шкалового микроскопа теодолита 2Т5К.
Отсчеты: горизонтальный круг - 236° 07,5'; вертикальный круг - 4° 37,5'
Призма 26 установлена на маятнике и выполняет роль компенсатора при вертикальном круге. Половина отражающей грани призмы 14 имеет зеркальное покрытие, граница его является разделительной линией между изображениями горизонтального и вертикального кругов. Далее изображения кругов передаются через призмы 16 и 17, объектив микроскопа 18 в фокальную плоскость окуляра 19.
Теодолит 2Т5К имеет основное положение при круге "лево".
Неисправности теодолита 2Т5К и их устранение
1) Наблюдается рен горизонтального круга (несоответствие наименьшего деления лимба длине шкалы микроскопа -
114
Рис. 90. Поле зрения шкалового микроскопа теодолита ЗТ5КП.
Отсчеты: горизонтальный круг - 236° 07,5'; вертикальный круг - 4° 37,5'
разность между действительной ценой деления лимба и определенной с помощью шкалового микроскопа).
Исправлять одновременно с параллаксом, ослабив винты крепления оправ линз 12 и 13 и перемещая их вдоль оптической оси.
2)Наблюдается рен вертикального круга. Исправлять аналогично п.1, перемещая оправы линз 24 и 27.
3)Сдвинуты или перекошены штрихи горизонтального круга относительно шкалы микроскопа. Исправлять, ослабив два винта крепления кронштейна с призмой 22, наблюдая в окуляр микроскопа, поворотом призмы 22.
115
Рис. 91. Оптическая схема теодолита 2Т5К:
1 - объектив зрительной трубы; 2 - фокусирующая линза; 3 - сетка нитей; 4 - окуляр; 5 - зеркало подсветки; 6 - иллюминатор;
7, 23 - сфеноиды; 8, 20 - ромб-призмы; 9 - линза-коллектив; 10 - горизонтальный круг; 11, 22 - призмы БР-180°;
12, 13, 24, 27 - микрообъективы; 14 - блок призм; 15 - шкала; 16, 17, 25, 30 - призмы АР-900; 18 - объектив микроскопа; 19 - окуляр микроскопа; 21 - вертикальный круг;
26 - призма-компенсатор; 28 - окуляр центрира;
29 - фокусирующая линза; 31 - объектив центрира
116
4)Рен на различных участках круга различен. Имеет место эксцентриситет горизонтального (вертикального) круга. Исправлять под микроскопом.
5)Плохое изображение штрихов круга, при этом изображение шкалы хорошее. Необходимо произвести чистку оптических деталей отсчетной системы кругов.
6)Сдвинуты штрихи вертикального круга вверх или вниз. Проверить закрепление призм 22 и 25, при необходимости сдвинуть призму 25 вдоль паза.
7)Предварительно эксцентриситет кругов можно проверить, наблюдая смещение изображения штрихов относительно штрихов соответствующей шкалы.
Порядок разборки вертикальной осевой системы
Порядок разборки вертикальных осевых систем теодолитов Т5, 2Т5, 2Т5К и ЗТ5КП одинаков. Для этого необходимо вывинтить четыре винта, расположенных по краям низка, придерживая колонку, осторожно извлечь вертикальную ось из втулки, вывинтить три винта, крепящие втулку с горизонтальным кругом к низку (расположены под 120° рядом с хвостовиком), и снять втулку вместе с горизонтальным кругом.
Устройство теодолита 4Т15П
ФГУП "УОМЗ" выпускает теодолит 4Т15П [89] со шкаловым микроскопом, в нем в поле зрения микроскопов вертикального и горизонтального кругов введены биссекторы и шкала микрометра. По кругам отсчитывают после совмещения барабанчиком микрометра соответствующего биссектора с ближайшим делением градусной шкалы.
Суммарный отсчет равен отсчету по градусной шкале (градусы и десятки минут) плюс отсчет по шкале микрометра (минуты, десятки секунд и секунды). На рис. 93,а отсчет по вертикальному кругу равен 90°22'24", на рис. 93,6 отсчет по горизонтальному кругу равен 323°45'23".
Рассмотрим оптическую схему теодолита 4Т15П (рис. 92). Световой поток от зеркала подсветки 1 через матовый иллюминатор 2 попадает на лимб вертикального круга 3; штрихи вертикального круга проецируются с помощью призмы 4 и микрообъективов 6 и 7 в плоскости лимба горизонтального круга 8; изображения кругов получаются на плоской поверх-
117
Рис. 92. Оптическая схема отсчетного микроскопа теодолита 4Т15П:
1 - зеркало подсветки; 2 - матовое стекло-иллюминатор; 3 - вертикальный круг; 4 - призма АкР-90°; 15, 18 - призмы АР-90°; 5,12,20 - диафрагмы;
6, 7, 10, 11, 19 - микрообъективы; 8 - горизонтальный круг; 9 - призма БР-1800; 16 - шкала; 14 - ромб-призма; 13 - ППП; 17 - линза-коллектив с индексамибиссекторами горизонтального и вертикального кругов; 21 - окуляр
ности линзы 17, на которой нанесены два биссектора (для горизонтального и вертикального кругов).
Совмещение биссекторов со штрихами лимбов осуществлять винтом 17 (см. рис. 95), поворачивая при этом ППП 13, с которой жестко связана шкала 16 микрометра. Призма 18,
118
Рис. 93. Поле зрения микроскопа теодолита 4Т15П:
а- отчет по вертикальному кругу - 90°22/24//;
б- отчет по горизонтальному кругу - 323°45'23"
микрообъектив 19 и окуляр 21 служат для считывания горизонтальных углов и зенитных расстояний. Оптическая схема зрительной трубы теодолита 4Т15П показана на рис. 94.
Рис. 94. Оптическая схема зрительной трубы теодолита 4Т15П:
1 - объектив; 2 - фокусирующая линза; 3 - оборачивающая система; 4 - сетка нитей; 5 - окуляр
Зенитное расстояние |
z |
вычисляют |
по |
одной из |
фор- |
мул: z = 0,5(Л-П+360°), |
z |
= Л-MZ, |
z = |
MZ-II+3600, |
где |
MZ = 0,5(Л+П-360°). |
|
|
|
|
|
Методика исследований погрешности совмещения может |
|||||
быть аналогична описанной |
выше. |
|
|
|
|
119
Причины, вызывающие погрешность совмещения.
Недостаточная разрешающая способность глаза наблюдателя.
Наклон лимба к вертикальной оси. Разъюстировка оптического мостика.
Параллакс между изображениями штрихов противоположных сторон лимба.
Неравномерный зажим винтов крепления круга.
Юстировка теодолита 4Т15П
Юстировку прибора осуществляют по правилам, описанным выше. Однако следует сказать об особенностях устранения рена и параллакса микрометра, а также юстировки положения горизонтальной оси вращения зрительной трубы прибора. Для устранения параллакса необходимо: снять боковую крышку со стороны вертикального круга и, наблю-
Рис. 95. Схема теодолита 4Т15П:
1 - диоптрийное кольцо окуляра; 2 - котировочные винты уровня; 3 - |
рукоятка |
|||
вращения горизонтального круга; 4 - подставка; 5 - наводящий винт |
алидады; |
|||
6 - уровень при алидаде; 7 - |
наводящий винт трубы; |
8 - |
колпачок; |
|
9 - закрепительный винт |
трубы; 10 - кремальера; |
И - |
винт; |
|
12 - закрепительный винт алидады; 13 - закрепительный винт подставки; 14 - подъемный винт; 15 - окуляр центрира; 16 - кольцо фокусирования; 17 - рукоятка микрометра; 18 - зеркало; 19 - зрительная труба; 20 - визир; 21 - колонка; 22 - окуляр микроскопа
120
дая в окуляр отсчетного микроскопа, диоптрийным кольцом получить четкое изображение индексов-бифиляров, ослабив винт 1 (рис. 96), перемещать микрообъектив 7 (см. рис. 92) до получения четкого изображения штрихов горизонтального круга; затем, ослабив винт 2 (рис. 96), перемещать микрообъектив 6 (см. рис. 92) до получения четкого изображения штрихов вертикального круга.
После устранения параллакса необходимо проверить рен, при этом сначала устранить рен горизонтального круга одновременным перемещением микрообъективов 7 (см. рис. 92), закрепленных винтами 1 (см. рис. 96), а затем рен вертикального круга перемещением микрообъективов 6 (см. рис. 92), закрепленных винтами 2 (см. рис. 96); юстировку положения горизонтальной оси вращения зрительной трубы выполнить винтами 11 (см. рис. 95), расположенными напротив друг друга на правой стороне колонки 21, вывинчивая один из винтов и завинчивая другой, каждый раз выполняя поверку (визирная ось зрительной трубы должна быть перпендикулярна оси вращения трубы).
1
Рис. 96. Схема теодолита 4Т15П:
1 - винты крепления линз горизонтального круга;
2 - винты крепления линз вертикального круга
121
Исследование рена горизонтального круга
Значение рена шкалового микроскопа вычисляют по формуле [47]:
г = -п1 ( а - Л 0 , |
(52) |
где а - отсчет по шкале микроскопа на заданной установке лимба при совмещении штриха круга со штрихом 0 шкалы, N - номинальное значение цены деления круга, равное 60', п - количество установок лимба.
Рен проверяется на участках круга через 30 -г- 60° [31], при этом систематическая погрешность несовпадения последнего штриха шкалы со штрихом круга не должна превышать 6" (0,1 наименьшего деления шкалы микроскопа). Измерения выполняются в прямом и обратном ходе (со сдвигом установки лимба на половину шага). Известны два метода исследований рена: непосредственное сравнение интервала деления лимба со шкалой микроскопа и использование "образцового" теодолита или коллиматора.
Первый метод. Здесь на каждой установке лимба выполняются следующие действия [49]: поворотом алидады или перестановкой лимба добиться соответствующей установки лимба, приблизительно совмещая нуль шкалы лимба (60° и т.д.) с нулем шкалы микроскопа, наводящим винтом алидады горизонтального круга точно совместить нуль шкалы микроскопа с соответствующим градусным штрихом установки лимба, отсчитать а по младшему градусному штриху по шкале микроскопа.
Пример записи и обработки результатов приведен в табл. 9.
Среднее значение рена г не должно превышать 0,1 деле-
ния шкалы микроскопа, иначе рен необходимо |
устранить |
[79]. |
|
Из табл. 9 видно, что средние значение рена в прямом и |
|
обратном ходе равны: |
|
г'ср = г"ср = - 0,2'; г = (г'ср + г"ср) /2. |
(53) |
122
|
|
|
|
|
Таблица 10 |
Установка |
Прямой ход |
|
|
Обратный ход |
|
Отсчет |
г' = а' - 60, |
Установка |
Отсчет |
г" = а" - 60, |
|
лимба, ° |
а' |
/ |
лимба, ° |
а" |
/ |
0 |
59,8 |
-0,2 |
30 |
59,9 |
-0,1 |
60 |
59,7 |
-0,3 |
90 |
59,7 |
-0,3 |
120 |
59,7 |
-0,3 |
150 |
59,7 |
-0,3 |
180 |
59,7 |
-0,3 |
210 |
59,8 |
-0,2 |
240 |
59,9 |
-0,1 |
270 |
59,8 |
-0,2 |
300 |
59,8 |
-0,2 |
330 |
59,8 |
-0,2 |
|
|
г' = -0,2' |
|
|
г"= -0,2' |
Второй метод. Пример установки теодолитов "образцового" типа Т2 и исследуемого типа 2Т5К показан на рис. 97.
и исследуемого теодолитов
Зрительные трубы обоих теодолитов, сфокусированные на бесконечность (видно четкое изображение удаленной точки), установлены на одной оси объективами навстречу друг другу. Перед измерениями в поле зрения зрительной трубы "образцового" теодолита должны быть видны две сетки нитей - теодолита ЗТ2КП и теодолита 2Т5К (рис. 98).
Поле зрения шкалового микроскопа с реном горизонтального круга г = - 1,5' показано на рис. 99.
На каждой установке лимба необходимо выполнить следующие действия:
винтом перестановки лимба установить соответствующий отсчет,
123
наводящим винтом алидады горизонтального круга теодолита 2Т5К совместить нуль шкалы микроскопа со штрихом установки лимба (Kj),
наводящим винтом алидады горизонтального круга теодолита ЗТ2КП ввести вертикальный штрих сетки нитей теодолита ЗТ2КП в середину биссектора сетки нитей теодолита 2Т5К,
по оптическому микрометру горизонтального круга теодолита ЗТ2КП отсчитать а ь
наводящим винтом алидады горизонтального круга теодолита 2Т5К совместить 60-е деление шкалы с младшим штрихом установки лимба Kj - 1,
выполнить пункт 3, по оптическому микрометру горизонтального круга тео-
долита ЗТ2КП отсчитать а2.
Пример исследований рена шкалового микроскопа теодолита 2Т5К № 73712 с помощью "образцового" теодолита приведен в табл. 10.
124
|
|
|
|
|
|
Т а б л и ца 15 |
|
Устан. |
Прямой ход |
|
|
Обратный ход |
|
||
Отсчет |
Отсчет |
г' = |
Устан. |
Отсчет |
Отсчет |
г" — |
|
лимба, ° |
/ a'i>// |
, а Ч |
a/ j - а/ 2, |
лимба, 0 |
fа"„// |
/а"2>// |
a j -// а 2, |
0 |
3 24,5 |
3 26,8 |
-2,3 |
30 |
3 32,4 |
3 36,3 |
|
60 |
2 13,4 |
2 15,8 |
-2,4 |
90 |
4 56,3 |
4 59,9 |
-3,6 |
120 |
0 36,3 |
0 39,1 |
-2,8 |
150 |
4 37,6 |
441,8 |
-4,2 |
180 |
1 45,1 |
147,6 |
-2,5 |
210 |
4 13,4 |
4 16,9 |
-3,5 |
240 |
1 31,6 |
2 34,7 |
-3,1 |
270 |
1 05,1 |
1 08,8 |
-3,7 |
300 |
2 07,9 |
2 10,3 |
-2,4 |
330 |
2 18,4 |
2 21,6 |
-3,2 |
|
|
|
• = -2,6" |
г = (г,ср + г"ср)/2 = -3,Г |
ср = -3,7" |
||
|
|
|
|
|
|||
Рис. 99. Поле зрения шкалового микроскопа
125
Рис. 100. Оптическая схема теодолита ЗТ5КП:
|
зрительная труба: 28 - объектив; 29 - фокусирующая линза; |
|
30 - |
оборачивающая |
система; 31 - сетка нитей; 32 - окуляр; отсчетная система |
шкалового микроскопа |
горизонтального круга: зеркало подсветки (не показано); |
|
2 - |
матовое стекло-иллюминатор; 3 - коллектив; 4, 23 - призмы АР-90°; 5 - линза; |
|
126
Вывод. Рен шкалового микроскопа горизонтального круга теодолита 2Т5К № 73712 исследован двумя методами, при этом получены следующие результаты: т{ = - 12" > гдоп = 6",
г2 = - 3,1"<г д о п =6" .
Второй метод более точный, так как здесь работает принцип совмещения изображений (в первом случае долю деления оценивают на глаз), поэтому можно считать, что рен отсутствует.
Оптическая схема теодолита ЗТ5КП
Рассмотрим принцип действия и отличительные особенности оптической схемы теодолита ЗТ5КП (см. рис. 100).
Вотсчетных системах вертикального и горизонтального кругов применяется односторонний отсчет, при этом система отсчитывания двухканальная.
Вотсчетной системе микроскопа вертикального круга световой поток от зеркала подсветки через иллюминатор 2, голубой светофильтр 20, призму 21 с коллективом 22 освещает штрихи вертикального круга 11; изображение штрихов вертикального круга через призму-компенсатор 19, подвешенный на маятнике, микрообъективом 16 передается в плоскость
шкалы 12, ППП 14 служит для исправления места нуля.
В отсчетной системе микроскопа горизонтального круга световой поток через призму 4 с желтым светофильтром освещает горизонтальный круг 6, изображение штрихов через оборачивающую систему призм 7, 10 микрообъективом 9 проецируется в плоскости шкалы 12.
Изображения обоих кругов вместе с изображениями шкал через призму 23 микрообъективом 24 проецируются в фокальной плоскости окуляра 26.
6 - горизонтальный круг; 7 - призма БР-1800; 8 - длиннофокусная линза; 9, 24 - микрообъективы; 10 - разделительная призма; 12,13 - шкала
с коллективом; 18,25 - диафрагмы; 26 - окуляр; 27 - выходной зрачок;
отсчетная система шкалового микроскопа вертикального круга: зеркало подсветки (не показано); 2 - матовое стекло-иллюминатор; 20 - фильтр; 21 - призма БР-1800; 22 - коллектив; 11 - вертикальный круг; 19 - призма АкР-90° (компенсатор); 15, 16 - микрообъективы; 14 - ППП;
17, 25 - диафрагмы; 12,13 - шкала с коллективом; 23 - призма АР-900; 26 - окуляр; 27 - выходной зрачок; 33 - плоскость изображений;
оптическая система центрира не показана
127
Контрольные вопросы
1.Зарисовать и изучить оптические схемы теодолитов 2Т5К, ЗТ5КП и 4Т15П.
2.Основные неисправности теодолитов типа Т5 со шкаловым микроскопом и методы их устранения.
3.Порядок разборки теодолитов типа Т5 (Т5К,ЗТ5КП).
4.Два метода исследований рена шкалового микроскопа.
11. ИССЛЕДОВАНИЕ РЕНА ОПТИЧЕСКОГО МИКРОМЕТРА ТЕОДОЛИТА ЗТ2КП (Т2, 2Т2)
Цель работы: изучить методику исследования рена оптического микрометра, исследовать рен оптического микрометра одного из теодолитов типа Т2.
Приборы и принадлежности: теодолит типа Т2 (2Т2, ЗТ2КП).
Содержание и порядок выполнения работы
Реном оптического микрометра называют разность между ценой полуделения лимба и его значением, измеренным оптическим микрометром,
где X - цена деления лимба, ц - цена деления шкалы оптического микрометра, п - количество делений шкалы микрометра, соответствующее у ; диапазон работы микрометра равен
10' ± 3 деления.
В приборах типа Т2 различают рен верхнего гв и нижнего гн изображений лимба горизонтального и вертикального кругов и средний рен. При исследованиях вычисляют гв, гн, средний рен гср = 0,5(гв + гн) и разность ренов Аг = гв - гн.
Так как рен зависит от эксцентриситета и погрешностей нанесения делений лимба, а также от качества юстировки оптического мостика и системы отсчетного микроскопа, то его исследование выполняют на разных участках круга в прямом (например, для горизонтального круга через 45°20') и обратном (со смещением круга на 22°20/) направлениях. Эксцентриситет теодолитов типа Т2 (с двухсторонней системой отсчитывания по кругам) на отсчет практически не влияет, однако,
129
при угловом элементе эксцентриситета, большем 40" (см. раздел 12), изменяется значение рена.
В исправном приборе согласно инструкции [30, 35] разность между средними значениями на всех установках круга Дг = гвср - гнср и гср = 0,5(гв + гн) не должны превышать 1,5".
Исследование рена
Рен исследуют при получении прибора со склада или после механических воздействий на прибор, а также в тех случаях, когда состояние прибора неизвестно.
Если значение рена более допустимого, рен можно не исправлять, а учитывать поправки по формуле [92]:
_ Г срД-
1 0 ' '
где Aj - количество минут по шкале микрометра, гср - значение среднего рена со своим знаком.
Пример значений поправки при г = 3" приведен в табл. 11.
|
|
|
Т а б л и ц а 11 |
Ai |
vr |
Ai |
vr |
0' |
0" |
6' |
1,8" |
Г |
0,3" |
Г |
2,1" |
2' |
0,6" |
8' |
2,4" |
3' |
0,9" |
9' |
2,7" |
4' |
1,2" |
10' |
3,0" |
5' |
1,5" |
|
|
Методика исследований рена оптического микрометра отсчетной системы горизонтального круга показана на примере теодолита ЗТ2КП № 26887 (рис. 101 и табл. 12):
1. Вращением барабанчика оптического микрометра установить отсчет по шкале микрометра, равный 0' 00" с отклонением не более 1 -ь 2";
130
А-к
а
А+180\I А+180'
А-2к А-к
А+180'
А-2к А-к
А+180в+к А+180"
А+к |
У |
• |
-15 |
|
00 |
||||
|
О |
- |
||
|
|
J- |
+2.3 |
(Г
А+180"-к J |
X |
-1.7 |
10 |
• |
00 |
J- |
+2.6 |
|
|
||
|
|
|
-2.0 |
|
О |
|
00 |
|
|
Л |
+3.2 |
|
|
|
-2.2 |
|
10 |
|
00 |
|
г |
+1.8 |
|
|
|
||
|
Л |
-и |
|
|
О |
|
00 |
|
|
|
+1.6 |
А |
|
л |
-1.5 |
|
|
||
|
ю |
/ |
. 00 |
|
|
+0.7 |
|
Рис. 101. Порядок совмещения штрихов лимба при исследовании рена оптического микрометра
131
|
|
|
|
|
|
|
|
|
|
Т а б л и ца 12 |
||
Дата: 13.11.2001 г. |
|
|
|
|
|
|
Теодолит ЗТ2КП № 26887 |
|||||
Наблюдатель: Тимошин И.И. |
|
|
|
|
|
|
|
|||||
|
|
Прямой ход |
|
|
|
Обратный ход |
|
|
||||
Уст. |
а |
в |
с |
|
а - в |
а - с |
Уст. |
а |
в |
с |
а - в |
а - с |
лим- |
/ / |
/ / |
" |
|
г'в |
г'„ |
лим- |
/ / |
/ / |
rt |
г "в |
Г "и |
|
|
|
|
|
|
|
||||||
ба |
|
|
|
|
|
|
ба |
|
|
|
|
|
1 |
2 |
3 |
4 |
|
5 |
6 |
7 |
8 |
9 |
10 |
И |
12 |
0°00 |
+0,2 |
+ 1,2 |
+ 1,9 |
|
-1,0 |
-1,7 |
22°20 |
-0,3 |
+ 1,1 |
+4,2 |
-1,4 |
-4,5 |
|
+0,3 |
|
+2,1 |
|
-0,8 |
-1,8 |
|
-0,2 |
+ 1,9 |
+3,2 |
-2,1 |
-3,4 |
45° |
|
+ 1,1 |
ср. |
|
-0,9 |
-1,8 |
|
|
|
ср. |
-1,8 |
-3,9 |
20' |
-0,9 |
|
0,0 |
|
-0,1 |
-0,9 |
67°40 |
+0,2 |
+2,9 |
+0,4 |
-2,7 |
-3,8 |
|
-1,0 |
|
0,0 |
|
-0,2 |
-1,0 |
|
0,0 |
+0,3 |
+4,1 |
-3,0 |
-4Л |
90° |
|
-0,8 |
ср. |
|
-0,2 |
-1,0 |
|
|
|
ср. |
-2,8 |
-3,9 |
40' |
-1,1 |
-0,8 |
+0,6 |
|
-2,1 |
-1,7 |
113° |
+ 1,3 |
-0,8 |
-1,9 |
+2,1 |
+3,2 |
|
-1,0 |
|
+0,6 |
|
-2,1 |
-1,6 |
00' |
+ 1,2 |
-0,8 |
-1,8 |
+2,0 |
+3,0 |
|
|
+ 1,0 |
ср. |
|
-2,1 |
-1,6 |
|
|
|
ср. |
+2,0 |
+3,1 |
|
|
+ 1,1 |
|
|
|
|
|
|
|
|
|
|
136° |
|
|
|
|
|
|
158° |
|
|
+3,0 |
|
-5,4 |
00' |
+2,0 |
+2,6 |
+4,0 |
|
-0,6 |
-2,0 |
20' |
-2,4 |
+ 1,3 |
-3,7 |
||
|
+2,1 |
+3,0 |
+4,1 |
|
-0,9 |
-2,0 |
|
-1,8 |
+2,0 |
+3,0 |
-3,8 |
-4,8 |
|
|
|
ср. |
-0,8 |
-2,0 |
203° |
|
|
ср. |
-3,8 |
-5,1 |
|
181° |
|
|
|
|
|
|
|
|
+0,7 |
+ 1,3 |
-0,7 |
|
20' |
-1,1 |
-1,1 |
+ 1,0 |
|
0,0 |
-2,1 |
40' |
0,0 |
-1,3 |
|||
|
-1,2 |
-1,8 |
+ 1,0 |
|
+0,6 |
-2,2 |
|
-0,9 |
-0,9 |
+ 1,1 |
0,0 |
-2,0 |
|
|
|
ср. |
|
+0,3 |
-2,2 |
|
|
|
ср. |
+0,6 |
-1,3 |
226° |
-0,9 |
+2,0 |
+0,9 |
|
-2,9 |
-1,8 |
249° |
-2,3 |
-1,2 |
-1,9 |
-1,1 |
-0,4 |
40' |
-0,2 |
+2,1 |
+ 1,9 |
|
-2,3 |
-1,7 |
00' |
-1,9 |
-1,4 |
-2,0 |
-0,5 |
+0,1 |
|
|
|
ср. |
|
-2,6 |
-1,8 |
|
|
|
ср. |
-0,8 |
-0,2 |
272° |
+ 1,1 |
+3,2 |
+4,1 |
|
-2,1 |
-3,0 |
249° |
+1,8 |
+2,0 |
+3,4 |
-0,2 |
-1,6 |
00' |
+2,1 |
+3,1 |
+4,0 |
|
-1,0 |
-1,9 |
20' |
+0,9 |
+2,9 |
+3,5 |
-2,0 |
-2,6 |
|
|
|
ср. |
-1,6 -2,4 |
|
|
|
ср. |
-1,1 |
-2,1 |
||
317° |
-1,0 |
+0,9 |
+ 1,0 |
|
-1,9 |
-2,0 |
339° |
+0,9 |
+4,2 |
+3,0 |
-3,3 |
-2,1 |
20' |
-0,9 |
+0,9 |
+ 1,2 |
|
-1,8 |
-2,1 |
40' |
+ 1,8 |
+3,8 |
+2,8 |
-2,0 |
-1,0 |
|
|
|
ср. -1,8 -2,0 |
|
|
|
ср. |
-2,6 |
-1,5 |
|||
Да - в) / п = -1,2"; Да - с) / п = -1,8" |
Да - в) / п = -1,3"; Да - с) / п = -1,8" |
|||||||||||
132
2.Рукояткой перестановки горизонтального круга совместить противоположные штрихи лимба (А) и (А + 180°) на установках согласно табл.11;
3.Наводящим винтом алидады точно совместить противоположные штрихи лимба;
4.Дважды совмещая барабанчиком штрихи (А) и (А + 180°), отсчитать по микрометру (отсчет (а)), соблюдая правило знаков, показанное на рис. 101, а, измерить цену полуделения верхнего и нижнего изображений, совмещая барабанчиком штрихи (А - X) и (А + 180°) (отсчет (в) на рис. 101, б) и штрихи (А) и
(А + 180° - X) (отсчет (с) на рис. 101, с); |
|
6. Вычислить разности отсчетов: Г'В = (щ - BJ) И R'H = |
- Q) |
в прямом (г') и обратном (г") ходе, которые характеризуют рен в прямом и обратном ходах соответственно;
7. Вычислить средние значения разностей по формулам, приведенным в п.6, из п = 8 установок круга:
F р
*вобрсрF
П
п
н н
'*нобрср
П
п>
8. Вычислить значения верхнего и нижнего ренов из двух ходов:
|
г , |
/г |
|
/ , |
п |
|
|
Y + Т |
|
Г + Y |
(55) |
||
|
|
|
гн = _ ! L yJ 3 "; |
|||
9. Вычислить средний рен г и разность ренов Дг: |
||||||
|
г = |
|
Лг = г в - г н . |
(56) |
||
В соответствии с формулами (55) |
(56) имеем: |
|||||
гв = (-1,2" - |
1,3")/2 = -1,2"; гн |
= (-1,8" - |
1,8")/2 = -1,8"; |
|||
г = (-1,2" - |
1,8")/2 = -1,5"; Аг |
= (-1,2" + |
1,8") = +0,6". |
|||
При необходимости уменьшения Аг и гср устранить разность ренов Дг, затем средний рен гср.
133
Исправление разности ренов Аг в теодолите ЗТ2КП
В теодолите ЗТ2КП рен между верхним и нижним изображениями штрихов лимбов необходимо исправлять одновременно с устранением параллакса. При этом в отсчетной системе горизонтального круга порядок юстировки следующий [92]:
1. Вывинтив два винта крепления, снять окулярное колено
оптического |
центрира, |
|
|
2. Ослабить |
винты |
крепления оправ микрообъективов |
|
(см. рис. 79, |
поз. |
8 и 10) оптического мостика, |
|
3.Для устранения параллакса установить окуляр микроскопа на резкое изображение верхних штрихов лимба, затем, вставив отвертку в шлиц открепленного винта линз микрообъектива оптического мостика, сместить оправу вдоль прорези до появления резкого изображения нижних штрихов и закрепить крепежные винты,
4.Контролировать разность ренов Аг, если она больше допустимого значения, исправление выполнить последовательным перемещением обеих оправ линз микрообъектива.
Юстировка среднего рена гср
1. Извлечь пружинное кольцо барабанчика отсчетного микроскопа,
2.Снять барабанчик и боковую крышку, вывинтив винты их крепления,
3.Ослабить винты крепления оправ линз 14 и 15 микрообъектива (см. рис. 79),
4.Установить по глазу резкое изображение грани, разделяющей верхнее и нижнее изображения штрихов лимба, перемещением оправ микрообъектива устранить параллакс верхних штрихов лимба,
5.По методике, описанной выше, проверить и устранить
средний рен гср. При этом необходимо оба микрообъектива приближать к плоскости лимба при положительном значении рена, увеличивая тем самым интервал между штрихами, и удалять от лимба при отрицательном значении рена гср,
6.Закрепить винты крепления микрообъективов и повторить исследование рена.
В отсчетной системе вертикального круга разность ренов Аг исправлять смещением микрообъективов 32 и 34 (см. рис. 79),
134
сняв предварительно боковую крышку с зеркалом подсветки, средний рен г исправлять смещением микрообъективов 38 и 40, предварительно вывинтив пробку, расположенную в нижней части колонки под переключателем кругов, и ослабив винт крепления оправы микрообъектива.
Вывод. Результаты исследований теодолита ЗТ2КП № 26887 показали, что разность ренов в отсчетной системе горизонтального круга Аг = +0,6" и средний рен г^ = - 1,5" не превышают допустимого значения, равного 1,5" [30]. Согласно инструкции по топографической съемке прибор не требует юстировки или введения поправок в результаты измерений.
Контрольные вопросы
1. Что называют реном оптического микрометра, причины возникновения разности ренов и среднего рена, их допустимые значения.
2.Методика исследований и вычисление рена горизонтального и вертикального кругов.
3.Правила введения поправки за рен.
4.Методика исправления рена оптического микрометра теодолитов типа Т2.
12. ИССЛЕДОВАНИЕ ЭКСЦЕНТРИСИТЕТОВ АЛИДАДЫ И ЛИМБА ГОРИЗОНТАЛЬНОГО КРУГА ТЕОДОЛИТОВ ТИПА Т2 (НА ПРИМЕРЕ ЗТ2КП)
Цель работы: исследование углового е и линейного е элементов эксцентриситетов алидады и лимба.
Приборы и инструменты: теодолит ЗТ2КП.
Содержание и порядок выполнения работы
Эксцентриситет алидады горизонтального круга - несовпадение центра делений лимба и вертикальной оси вращения теодолита, эксцентриситет лимба - несовпадение оси вращения лимба с центром делений лимба.
При измерениях горизонтальных углов при двух положениях круга (Л и П) эксцентриситеты в теодолитах с односторонней системой отсчитывания и при одном круге в теодолитах с двусторонней системой отсчитывания типа Т2 не влияют на точность отсчета по лимбу. Однако, так как вертикальная ось опирается на шарикоподшипник и, вследствие возможной неточности диаметров шариков и зазоров между осью и втулкой, описывает коническую поверхность, то (учитывая свойство подшипника перемещаться с угловой скоростью вдвое меньшей, чем ось) для полного исключения влияния эксцентриситета при измерении горизонтальных углов необходимо выполнять четное количество приемов с соответствующей перестановкой круга [30, 92].
При исследованиях элементов эксцентриситетов алидады и лимба необходимо определить значения отсчетов Р1 2 (рис. 102), при которых эксцентриситеты оказывают максимальное влияние на изменение разности ренов на разных участках круга, значения угловых еА, eL и линейных eA, eL
136
элементов эксцентриситетов алидады и лимба, осевой системы е0:
еAL = ±je2A+e2L-2eAeLcos(PA-PL). |
(57) |
Суммарное значение углового эксцентриситета прибора вычисляют как сумму векторов:
® imax = | £ L | + | Е О | • |
( 5 8 ) |
Из рис. 102, б и формулы (57) видно, что при разности РА - PL = 90° имеет место максимальное значение углового элемента эксцентриситета ет а х :
п*
о |
— Р • |
Q _ |
max р |
(59) |
^тах- — . |
|
|
||
угловой элемент эксцентриситета не влияет на отсчет по лимбу, так как:
М ^ М ^ + е и М2 = М 2 ' - е .
Их сумма Mj + М2 = Mi + М2' свободна от влияния углового эксцентриситета.
137
В исправном приборе допускают ет а х < 40" [24, 25, 79] (за- |
|||
вод гарантирует при выпуске прибора 30") [31]. |
|||
На примере теодолита ЗТ2КП покажем влияние линейно- |
|||
го элемента эксцентриситета алидады на разность ренов. |
|||
Дано: радиус лимба R = 45 мм, цена деления лимба X = 20', |
|||
c8 |
= 40" |
|
|
max |
™ • |
|
|
Тогда из формулы (59) имеем: |
|
||
|
е д = |
40" х 45000 мкм |
0 . |
|
206265 |
= 8,7 мкм. |
|
|
А |
|
|
При смещении лимба на значение еА имеем:
Rj = 45008,7 мкм, R2 = 44991,3 мкм. Тогда в угловой мере
одно деление с одной стороны лимба равно: |
|
|||
Л |
261,8 мкм х 206265" |
1 1 Л О О , |
„ |
- |
Я, = |
! |
= 1198,8 |
, а с другой стороны |
лимба |
^ |
45008,7 мкм |
|
|
|
= |
261,8 мкм х 206265" = ^ш |
^ |
|
|
|
44991,3 .mo* |
|
|
|
Разность Хх-Х2~ |
1,4" характеризует влияние эксцентри- |
|||
ситета на рен при угловом элементе его ет а х = 40". |
|
|||
Аналогичный расчет показывает, что уже при £ т а х |
= 60" |
|||
значение Х1-Х2 = 3,8", что больше допустимого значения разности ренов.
При исследованиях элементов эксцентриситетов алидады или лимба в теодолитах с двухсторонней системой отсчитывания достаточно на разных диаметрах круга измерить разности Vj = М', - Mj двух отсчетов (см. рис. 102, б), где М'{ - отсчет при совмещении штрихов лимба с неподвижным индексом, Mj - отсчет при совмещении штрихов противоположных участков лимба. Так как при исследованиях эксцентриситета в теодолитах типа Т2, во-первых, в качестве неподвижного индекса используют штрихи вертикального круга (что очень неудобно), организуя отсчет как бы по одному отсчетному устройству, во-вторых, при совмещениях штрихов они двигаются навстречу друг другу, то вычисленные разности V, необходимо умножить на четыре [30].
Алидаду или лимб при исследовании эксцентриситета теодолитов с двухсторонней системой отсчитывания переставляют через 30° в прямом и обратном направлениях.
138
Связь между v{ и элементами эксцентриситетов описывают выражением вида [49]:
Vf=-^psin(0z - Р ) + у/, |
(60) |
где - установка алидады (или лимба), |
- посто- |
янный угол, определяющий положение неподвижного индекса (постоянное положение зрительной трубы в вертикальной
плоскости).
При исследовании эксцентриситета алидады приборов с компенсаторами при вертикальном круге их тщательно горизонтируют.
Пример исследования эксцентриситета алидады теодолита ЗТ2КП № 27233 приведен в табл.13 и на рис. 103.
На каждой установке алидады необходимо выполнить следующие действия [49]:
1)барабанчиком оптического микрометра установить отсчет около 5'00",
2)вращением алидады установить отсчет ф1?
3)барабанчиком оптического микрометра дважды совме-
стить штрихи горизонтального круга ф1 и ф^ + 180°, при этом разность отсчетов при двух совмещениях не должна превышать 2",
4)в табл. 13 записать отсчеты Ы{ и М2,
5)переключатель кругов повернуть примерно на 45° до появления в поле зрения штрихов вертикального круга,
6)барабанчиком оптического микрометра дважды совместить штрихи горизонтального круга со штрихами вертикального круга, выбранными за неподвижный индекс (на всех установках алидады положение зрительной трубы в вертикальной плоскости должно оставаться неизменным),
7)в табл.13 записать отсчеты М'й и M'i2,
8)переключатель кругов возвратить в горизонтальное положение,
9) для каждой установки алидады вычислить разности = = 4(M'icp - Micp). При качественных наблюдениях колебания двух соседних значений не должны превышать 15% [45].
139
Обработка результатов исследований может быть выполнена как графически, так и аналитически (наиболее часто используют графический метод обработки) [24].
Графический метод обработки результатов исследований
При графическом методе строят график (см. рис. 103), при этом по оси абсцисс откладываются углы установки алидады (лимба) (фА = 0°, 30° 330°) в прямом и обратном ходе, по оси ординат - соответствующие разности v".
Для уменьшения значения постоянного угла \|/ и тем самым снижения трудоемкости при измерениях целесообразно при нулевой установке алидады или лимба наводящим винтом вертикального круга подвести неподвижный индекс ближе к штрихам горизонтального круга. Постоянный угол \|/ вычислить по формуле (см. рис. 103):
(6i)
где п = 12 - количество установок алидады (или лимба).
зр бр 9р 1f0 1f0 |
2]0 2j0 27{0 300 3^0 ф°, |
70
80
90
ЮС
110
12Q
13С
14С
15С
V
Рис. 103. Графическое представление элементов эксцентриситета алидады
140
|
|
|
|
|
|
|
|
|
|
|
Т а б л и ца 15 |
|
Дата: 20.11.2002 г. |
|
|
|
|
|
|
Теодолит ЗТ2КП №27233 |
|||||
Наблюдатель: Шаимкулов Д.А. |
|
|
|
|
|
|
|
|||||
Уста- |
|
Отсчет "М" при |
|
Отсчет "М'" при |
V i = |
|||||||
новка |
совмещении ф; и ф1 + 180° |
совмещении (ft |
||||||||||
алидады, |
|
штрихов лимба |
|
с индексом |
|
= 4(М'с р -Мс р ), |
||||||
Ф ° |
|
1 |
2 |
|
Мср |
|
1 |
2 |
|
М'ер |
/ |
и |
|
|
|
|
|
|
|||||||
0 |
6' 26,1" |
26,3" |
6' 26,2" 8' 40,2" |
40,1" |
8' 40,2" |
2 |
14,0 |
|||||
30 |
5 |
17,0 |
16,8 |
5 |
16,9 |
7 |
25,0 |
25,6 |
7 |
25,3 |
2 |
08,4 |
60 |
7 |
09,9 |
09,5 |
7 |
09,7 |
8 |
47,6 |
47,0 |
8 |
47,3 |
1 |
37,6 |
90 |
6 |
32,3 |
31,8 |
6 |
32,0 |
8 |
06,9 |
07,1 |
8 |
07,0 |
1 |
35,0 |
120 |
7 |
54,2 |
53,2 |
7 |
53,7 |
9 |
12,5 |
12,5 |
9 |
12,5 |
1 |
18,8 |
150 |
6 |
51,7 |
52,5 |
6 |
52,1 |
8 |
17,7 |
17,2 |
8 |
17,4 |
1 |
25,3 |
180 |
6 |
35,4 |
34,2 |
6 |
34,8 |
8 |
06,0 |
06,8 |
8 |
06,8 |
1 |
32,0 |
210 |
5 |
55,7 |
56,1 |
5 |
55,9 |
7 |
40,2 |
40,7 |
7 |
40,4 |
1 |
44,5 |
240 |
6 |
37,3 |
35,7 |
6 |
36,5 |
8 |
28,6 |
28,4 |
8 |
28,5 |
1 |
52,0 |
270 |
6 |
23,8 |
24,6 |
6 |
24,2 |
8 |
23,1 |
22,9 |
8 |
23,0 |
1 |
58,8 |
300 |
6 |
22,1 |
22,9 |
6 |
22,5 |
8 |
30,9 |
30,9 |
8 |
30,9 |
2 |
08,4 |
330 |
6 |
12,7 |
13,9 |
6 |
13,3 |
8 |
26,6 |
28,5 |
8 |
28,6 |
2 |
15,3 |
330 |
6 |
02,7 |
03,0 |
6 |
02,9 |
8 |
11,9 |
12,0 |
8 |
12,0 |
2 |
09,1 |
300 |
6 |
18,9 |
19,9 |
6 |
19,4 |
8 |
23,2 |
23,2 |
8 |
23,2 |
2 |
03,8 |
270 |
6 |
28,4 |
28,0 |
6 |
28,2 |
8 |
21,5 |
21,8 |
8 |
21,6 |
1 |
53,4 |
240 |
6 |
49,1 |
48,1 |
6 |
48,6 |
8 |
33,9 |
33,7 |
8 |
33,8 |
1 |
45,2 |
210 |
6 |
58,6 |
59,8 |
6 |
59,2 |
8 |
34,3 |
34,1 |
8 |
34,2 |
1 |
35,0 |
180 |
6 |
04,9 |
05,9 |
6 |
05,4 |
7 |
30,1 |
29,9 |
7 |
30,0 |
1 |
24,6 |
150 |
6 |
27,1 |
26,7 |
6 |
26,9 |
7 |
44,9 |
44,9 |
7 |
44,9 |
1 |
18,0 |
120 |
6 |
51,5 |
52,7 |
6 |
52,1 |
7 |
57,0 |
57,1 |
7 |
57,0 |
1 |
04,9 |
90 |
5 |
56,1 |
56,9 |
5 |
56,5 |
7 |
27,8 |
27,4 |
7 |
27,6 |
1 |
31,1 |
60 |
6 |
05,9 |
05,8 |
6 |
05,8 |
7 |
36,1 |
36,3 |
7 |
36,2 |
1 |
30,4 |
30 |
4 |
58,8 |
59,6 |
4 |
59,2 |
7 |
01,9 |
02,1 |
7 |
02,0 |
2 |
02,8 |
0 |
5 |
25,1 |
24,1 |
5 |
24,6 |
7 |
33,2 |
33,2 |
7 |
33,2 |
2 |
08,6 |
Из графиков прямого и обратного ходов вычисляют среднюю между ними плавную кривую, которую аппроксимируют функцией вида:
V = e n M X s i n ( ^ + v ) , |
(62) |
где ет а х - амплитуда синусоиды (наибольшее влияние эксцентриситета на односторонний отсчет по лимбу).
141
Из |
графика видно, что: ет а х = 14", Р, = 55°, Р2 = 235°, |
у = - |
1'38". |
Отсюда линейный элемент эксцентриситета алидады:
При исследованиях эксцентриситета лимба начальный диаметр его должен быть в том же положении, что и при начале исследований эксцентриситета алидады. Установки лимба выполнять сначала рукояткой перестановки лимба, а затем наводящим винтом алидады. По результатам исследований вычислить линейный элемент эксцентриситета е (см. рис. 102, а).
Аналитический метод обработки результатов исследований
Значения элементов эксцентриситетов необходимо вычислить по следующим формулам [24, 31, 49]:
(63)
Направление эксцентриситета относительно нуля круга
(64)
Угловой элемент эксцентриситета
1
(65)
Линейный эксцентриситет
(66)
Постоянный угол
(67)
2п
142
Аппроксимирующую синусоиду вычислить из уравнения:
Vj = X sin ф1 + Y cos ф1 + \|/ = |
|
= 18,6 sin ф; - 5,3 cos ф1 - 98" . |
(68) |
Оценку точности полученных результатов исследований выполнить по формулам [49, 87]:
(69)
здесь: А{ - отклонение i-ro среднего значения v от аппроксимирующей синусоиды, п = 12.
т е |
= Hb-R |
[I; |
|
(70) |
|
|
Р |
\п |
' |
|
|
т_ — |
mvxR |
п |
2 |
; |
(71) |
3600 хе |
RJ- |
|
|||
р |
и |
|
|
к } |
|
ти/ = m v J ~ • |
|
|
( 7 2 ) |
||
При более строгом анализе в обоих методах может быть использован гармонический анализ средней из двух ходов кривой, например, с помощью быстрого преобразования Фурье, где первая гармоника в спектре сигнала покажет значение соответствующего эксцентриситета [18].
Исследование элементов эксцентриситета у теодолитов с
односторонней системой отсчитывания
В теодолитах с односторонней системой отсчитывания погрешность от влияния эксцентриситета сказывается на точности отсчитывания [25]. Поэтому задача исследования эксцентриситета в них имеет практическое значение.
При исследовании эксцентриситета лимба горизонтального круга необходимо навести зрительную трубу на марку и при двух положениях зрительной трубы (JI и П) отсчитать по микроскопу aj и а2.
143
Угловой элемент эксцентриситета лимба вычислить по формуле:
j '
где с - коллимационная погрешность, вычисляется как половина среднего значения разностей отсчетов при двух положениях круга на разных его установках. Измерения необходимо повторить по маркам, установленным по кругу через 22°30/, до отсчета, равного 337°30'. Из-за сложности установки марок можно измерения выполнить по одной марке, при этом после измерений при нулевом положении лимба необходимо повернуть алидаду теодолита на 22°30', закрепить ее закрепительным винтом, ослабить зажимной винт оси вращения теодолита в подставке и снова визировать на ту же марку при двух положениях круга. Вычислить Операцию повторить до отсчета, равного 337°30'.
При исследовании эксцентриситета алидады измерения производят при любом положении лимба по двум визирным маркам, расположенным на диаметрально противоположных сторонах относительно прибора, образуя как бы двусторонний отсчет по лимбу.
По полученным значениям, как и для теодолитов с двусторонней системой отсчитывания, строят синусоидальную кривую.
Центрирование лимба горизонтального круга
Центрировка круга, т.е. совмещение центра делений лимба с осью вращения, выполняется с погрешностью до 10 мкм. Известны устройства для центрировки с двумя микроскопами, расположенными над противоположными сторонами лимба [22, 27] (рис. 104).
Для этого на лимбах перед нанесением угломерной шкалы гравируют технологическую центрировочную окружность, лимб центрируют непосредственно на оси вращения алидады. Поперечными перемещениями лимба добиваются, чтобы при вращении его вокруг оси линия центрировочной окружности не смещалась относительно биссекторов на сетках микроскопов.
144
Рис. 104. Схема центрирования лимба:
1 , 2 - микроскопы; 3 - глето-глицериновый цемент; 4 - лимб; 5 - закрепительные винты
Рис. 105. Прибор для центрировки лимба:
1 - лампочка подсветки; 2 - центрируемый лимб; 3, 6 - линзы проекционной системы; 4 - пентапризма;
5 - прямоугольная призма; 7 - ППП ( компенсатор ); 8 - микроскоп; 9 - основание; 10 - рукоятка компенсатора
145
Рассмотрим центрировочное устройство с одним микроскопом [30] (рис. 105).
Проекционная система дает изображение штрихов лимба на противоположной части круга. Изображения двух сторон лимба образуют между собой бифиляры. При наличии эксцентриситета ширина бифиляров изменяется при вращении горизонтального круга. Рукояткой 10 необходимо регулировать ширину бифиляра. Смещая горизонтальный круг, добиваются постоянства ширины бифиляров при вращении горизонтального круга.
Вывод. По результатам исследований эксцентриситета алидады теодолита ЗТ2КП № 26887 получены следующие его
элементы: |
|
£тах=14", еА = 3,1 мкм, |
= 55°, Р2 = 235°. |
Прибор не требует юстировки элементов эксцентриситета алидады.
Контрольные вопросы
1.Что называют эксцентриситетом лимба и алидады.
2.Точность центрирования кругов у современных теодолитов, допустимое значение углового элемента эксцентриситета.
3.Влияние эксцентриситета на рен оптического микрометра.
4.Методика исследований элементов эксцентриситета алидады и лимба.
5.Графический и аналитический методы вычисления элементов эксцентриситетов.
6.Методика исследований эксцентриситета в теодолитах
содносторонней системой отсчитывания.
13. ИССЛЕДОВАНИЕ РАБОТЫ КОМПЕНСАТОРА ПРИ ВЕРТИКАЛЬНОМ КРУГЕ ТЕОДОЛИТА ЗТ2КП
Цель работы: исследование характеристик компенсатора: времени затухания tK, диапазона работы vK, средней квадратической погрешности т к , систематической погрешности 8К.
Приборы и принадлежности: теодолит ЗТ2КП, визирная марка.
Содержание и порядок выполнения работы
Компенсатор при вертикальном круге заменяет цилиндрический уровень при алидаде вертикального круга, обеспечивая постоянство отсчета по вертикальному кругу при наклонах оси вращения прибора. Схема действия компенсатора теодолитов ЗТ2КП и ЗТ5КП приведена на рис. 106.
Для простоты рассуждений предположим, что при отвесном расположении оси вращения теодолита визирная марка А расположена в бесконечности на линии горизонта и место зенита MZ = 90°. В этом случае (см. рис. 106,а) при отвесном положении маятника 3 изображение верхней части круга (270о/) будет расположено на оптической оси выше ребра двугранного прямого угла призмы-крыши АкР-90° 2, являющейся компенсатором. Напротив его на расстоянии S2 = Sx от точки М (ребро прямоугольной призмы 5) (см. рис. 106,в) расположен штрих нижней части вертикального круга (90°). Sj - расстояние от промежуточного изображения верхних штрихов лимба до точки М, S2 - расстояние от нижних штрихов до точки М. Призма 5 объединяет спроецированные в поле зрения штрихи противоположных частей круга. Допустим, что прибор 4 вместе с оптической системой L{ наклонился относительно отвесной линии вправо на угол у (см. рис. 106,6) (это может быть вызвано, например, односторонним нагревом прибора или оседанием ножек штатива). В этом случае в центре сетки нитей будет спроецировано изображение точки А',
147
изображение нижней части лимба относительно ребра призмы 5 останется в прежнем положении (90о/), а изображение верхней противоположной части лимба будет смещено на угол у на грань призмы-компенсатора 2 (270о/). Призма-крыша 2 сместит изображение на угол 2у (270°"). Если теперь наводящим винтом установить зрительную трубу в горизонтальное положение (марка А), повернув ее на угол у, то штрихи про-
Рис. 106. Схема, поясняющая принцип действия компенсатора при вертикальном круге теодолитов ЗТ2КП и ЗТ5КП:
1 - |
вертикальный круг; 2 - призма-компенсатор АкР-90°; 3 - рама-маятник; |
4 - |
плата (корпус); 5 - призма АР-90°; АА - визирная ось зрительной трубы; |
|
К - точка, вокруг которой наклонился прибор; |
|
у - угол наклона прибора; А - марка |
148
тивоположных участков лимба, смещаясь навстречу друг другу на угол у, вернутся в исходное положение (точка N на рис. 106, б), т.е. отсчет по вертикальному кругу, несмотря на наклон оси вращения, не изменится. Все сказанное справедливо для любого положения зрительной трубы относительно места зенита.
Условие компенсации для теодолита с односторонней системой отсчитывания ЗТ5КП имеет вид [30]:
где L - длина маятника, К - при малых углах величина постоянная, зависит прямо пропорционально от угла отклонения подвески компенсатора от отвесной линии и обратно пропорционально от угла наклона теодолита.
Для теодолита ЗТ2КП условие компенсации имеет вид:
Т - R
Функциональная схема компенсатора теодолита ЗТ2КП показана на рис. 107.
Призма-компенсатор 4 жестко установлена в раме-маят- нике 3, который через плоскую пружину 2 связан с платой 1, закрепленной четырьмя винтами 8 в корпусе теодолита. Вин- ты-упоры 6, закрепленные стопорными винтами, служат для регулировки диапазона работы компенсатора. Верхними балансировочными грузиками 5 балансируют маятник компенсатора относительно отвесной линии (одновременно изменяя место зенита): при юстировке, одной шпилькой удерживая внутренний грузик, другой шпилькой ослабляют внешний грузик. По окончании юстировки грузики должны быть законтрены (затянуты) между собой. Нижними грузиками 7 аналогично изменяют момент инерции маятника, исправляя тем самым погрешность работы компенсатора.
При исследовании времени затухания компенсатор выводят из состояния покоя и по секундомеру определяют tk (время колебаний нижних изображений вертикального круга от-
149
Рис. 107. Функциональная схема компенсатора теодолита ЗТ2КП:
1 - плата; 2 - плоская пружина; 3 - рама-маятник; 4 - призма-компенсатор АкР-90°; 5 - верхние балансировочные грузики;
6 - винты-упоры; 7 - нижние балансировочные грузики; 8 - винты крепления рамы; 9 - вертикальный круг
носительно верхних), которое у исправного прибора должно быть не более 1 + 2 угловых секунд.
Диапазон работы компенсатора исследуется двумя методами [49,92]:
1. При отгоризонтированном теодолите отсчитать по вертикальному кругу, затем, медленно вращая подъемный винт, расположенный в коллимационной плоскости, наблюдать смещение нижних штрихов вертикального круга относительно верхних до момента их остановки и снова отсчитать по вертикальному кругу. Разность отсчетов характеризует половину диапазона работы компенсатора. Далее исследовать вторую половину диапазона, вращая подъемный винт в другую сторону от нулевого положения.
2. При отгоризонтированном теодолите зрительную трубу навести на визирную цель и отсчитать по вертикальному кру-
150
гу. Барабанчиком оптического микрометра установить отсчет на 20" больше, после этого подъемным винтом, лежащим в коллимационной плоскости, совместить изображения верхних и нижних штрихов. Затем зрительную трубу снова навести на цель и отсчитать по вертикальному кругу. Постоянство отсчетов при дальнейших наклонах прибора характеризует работу компенсатора. Пример исследований теодолита № 27095 показан в табл. 14.
Случайную mk и систематическую 0К погрешности работы компенсатора вычисляют как:
m _ I m . п _[д*1. Л _[ЛГ]
где 9/ - погрешность компенсации при i-м положительном наклоне прибора, 9 " - погрешность компенсации при i-м отрицательном наклоне прибора, п' и п" - количество отсчетов в положительном и отрицательном направлениях.
|
|
|
|
|
|
|
|
|
|
Т а б л и ц а 14 |
|
|
|
Отсчеты |
|
|
|
|
|
||
|
|
по вертикаль- |
|
|
|
|
|
|||
Наклон |
|
ному кругу |
а с р - |
|
|
|
||||
прибора v, |
Пря- |
Обрат- |
а\ |
+ д2 |
d = aj - а2, = |
а 1 ф _ а 0 с р » |
||||
|
|
мой |
ный |
/ |
2 |
' |
|
vi |
||
/ |
/ / |
хода! |
ход а2 |
гг |
rr |
|
" Г |
|||
|
|
|
|
|
|
|||||
|
1 |
|
2 |
|
3 |
|
4 |
5 |
6 |
1 |
+ 3 |
4 0 |
12 |
2 3 , 4 |
|
|
|
|
|
|
|
+ 3 |
2 0 |
12 |
17,2 |
12 |
17,6 |
12 |
17,4 |
- 0 , 4 |
+ 1 , 0 |
+ 0 , 3 0 |
+ 3 |
0 0 |
12 |
17,1 |
12 |
17,4 |
12 |
17,2 |
- 0 , 3 |
+ 0 , 8 |
+ 0 , 2 7 |
+ 2 |
4 0 |
12 |
17,0 |
12 |
17,2 |
12 |
17,1 |
- 0 , 2 |
+ 0 , 7 |
+ 0 , 2 6 |
+ 2 |
2 0 |
12 |
17,0 |
12 |
17,3 |
12 |
17,2 |
- 0 , 3 |
+ 0 , 8 |
+ 0 , 3 4 |
+ 2 |
0 0 |
12 |
16,8 |
12 |
17,2 |
12 |
17,0 |
- 0 , 4 |
+ 0 , 6 |
+ 0 , 3 0 |
+ 1 |
4 0 |
12 |
16,7 |
12 |
16,9 |
12 |
16,8 |
- 0 , 2 |
+ 0 , 4 |
+ 0 , 2 4 |
+ 1 |
2 0 |
12 |
16,7 |
12 |
16,9 |
12 |
16,8 |
- 0 , 2 |
+ 0 , 4 |
+ 0 , 3 0 |
+ 1 |
0 0 |
12 |
16,4 |
12 |
16,9 |
12 |
16,6 |
- 0 , 5 |
+ 0 , 2 |
+ 0 , 2 0 |
+ 0 |
4 0 |
12 |
16,5 |
12 |
16,7 |
12 |
16,6 |
- 0 , 2 |
+ 0 , 2 |
+ 0 , 3 0 |
+ 0 |
2 0 |
12 |
16,4 |
12 |
16,6 |
12 |
16,5 |
- 0 , 2 |
+ 0 , 1 |
+ 0 , 3 0 |
0 |
0 0 |
12 |
16,4 |
12 |
16,4 |
12 |
16,4 |
|
|
[Л/]=2,81 |
151
Окончание табл. 14
Отсчеты по вертикаль-
Наклон |
|
ному кругу |
а |
|
|
|
|
|||
|
ср - |
|
Aj = |
|
||||||
прибора v, |
|
|
|
|
а\ + |
|
|
|||
Пря- |
Обрат- |
d = а, - а2, = a\cp~a0cp> |
|
|||||||
|
|
|
2 |
|
||||||
Г |
ft |
мой |
ный |
|
' |
|
|
|||
/ |
// |
|
|
|
||||||
хода, |
ход а2 |
|
|
|
||||||
|
|
|
|
|
|
|
||||
|
1 |
|
2 |
|
3 |
|
4 |
5 |
6 |
7 |
- 0 |
20 |
12 |
16,4 |
12 |
16,3 |
12 |
16,4 |
+0,1 |
0,0 |
0,00 |
- 0 |
40 |
12 |
16,6 |
12 |
16,5 |
12 |
16,6 |
+0,1 |
+0,2 |
+0,28 |
-1 |
00 |
12 |
16,8 |
12 |
16,7 |
12 |
16,8 |
+0,1 |
+0,4 |
+0,40 |
-1 |
20 |
12 |
16,8 |
12 |
16,9 |
12 |
16,8 |
-0,1 |
+0,4 |
+0,30 |
-1 |
40 |
12 |
16,8 |
12 |
16,8 |
12 |
16,8 |
0,0 |
+0,4 |
+0,24 |
- 2 |
00 |
12 |
16,9 |
12 |
17,0 |
12 |
17,0 |
-0,1 |
+0,6 |
+0,30 |
- 2 |
20 |
12 |
17,2 |
12 |
17,1 |
12 |
17,2 |
+0,1 |
+0,8 |
+0,34 |
- 2 |
40 |
12 |
17,1 |
12 |
17,3 |
12 |
17,2 |
-0,2 |
+0,8 |
+0,30 |
- 3 |
00 |
12 |
17,4 |
12 |
17,4 |
12 |
17,4 |
0,0 |
+ 1,0 |
+0,33 |
- 3 |
20 |
12 |
17,5 |
12 |
17,7 |
12 |
17,6 |
-0,2 |
+ 1,2 |
+0,36 |
- 3 |
40 |
12 |
24,8 |
12 |
28,2 |
|
|
|
|
[А/1=2,85 |
|
|
|
|
|
||||||
Согласно паспортам на приборы ЗТ2КП и ЗТ5КП [91, 92] диапазон работы компенсатора должен быть более ± 3'.
Если диапазон работы компенсатора меньше ± 2' [92] или погрешность больше 0,87Г, то прибор необходимо отправить в мастерскую для ремонта.
|
Из табл. 14 видно, что |
mk |
=0,16*; |
|||
0^=^ |
20 |
= 0,14"/1'; 0k-=^ |
20 |
= O,14Vl/. |
||
k |
|
|
k |
|
||
|
Юстировка |
компенсатора |
|
|||
|
Юстировку |
компенсатора вне мастерской выполняют в |
||||
крайних случаях. Для исправления диапазона работы компенсатора необходимо снять боковую крышку с зеркалом подсветки, вывинтить стопорные винты на 1,5 оборота, затем винтами-упорами выставить зазор, обеспечивающий требуемый диапазон работы, и закрепить стопорные винты. Устранение погрешности работы компенсатора описано выше.
152
Вывод: в исследуемом теодолите ЗТ2КП №27095 диапазон работы компенсатора равен ± 3'20", при этом случайная и систематическая погрешности не превышают 0,15", что соответствует принятым допускам.
Контрольные вопросы
1. Оптическая схема отсчетного микроскопа вертикального круга теодолита ЗТ2КП.
2.Принцип действия компенсатора при вертикальном круге теодолитов ЗТ5КП и ЗТ2КП.
3.Методика исследования диапазона и погрешностей компенсатора.
4.Методика юстировки погрешностей и диапазона работы компенсатора.
14. ИССЛЕДОВАНИЕ СРЕДНЕЙ КВАДРАТИЧЕСКОЙ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ ГОРИЗОНТАЛЬНОГО УГЛА
Цель работы: приобретение навыков по измерению углов и исследование погрешности измерения горизонтальных углов теодолитом ЗТ2КП.
Приборы и принадлежности: теодолит ЗТ2КП, визирные марки.
Содержание и порядок выполнения работы
Точность измерения горизонтальных углов теодолитом количественно характеризуется средней квадратической погрешностью nip, значение которой для теодолита ЗТ2КП должно составлять < 2". Реальное значение Шр оценивается следующими методами [49]:
1)многократных измерений горизонтального угла (3,
2)многократных измерений эталонного горизонтального
угла,
3)многократных измерений нескольких горизонтальных углов на станции,
4)предварительной обработки угловых измерений в триангуляции.
В лаборатории как правило Шр исследуют первым из перечисленных методов. Для этого необходимо выбрать горизонтальные углы в пределах 90° ± 30°, при этом, с целью исключения погрешностей за перефокусировку, марки должны находиться на одинаковом расстоянии, а угол наклона при визировании на них должен отличаться не более, чем на 20° [49].
Выполнить повторные измерения угла сериями по 12 приемов с перестановкой круга через 15°. Количество серий должно быть не менее четырех.
Результаты измерений занести в табл. 15.
154
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т а б л и ца |
15 |
|
№ |
|
|
|
|
|
Отсчеты |
|
|
|
|
Л + П |
|
|
||||
прие- |
|
|
Л |
|
|
|
|
П |
|
|
Л-П, |
Pi, |
|
||||
ма/ |
|
о |
1 |
tt |
2 |
Ср. |
|
1 |
|
2 |
Ср. |
tt |
2 |
о t |
tt |
||
напр. |
t |
|
|
О t tt |
|
tt |
tt |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
1 |
|
0 05 06,5 |
07,5 |
07,0 |
180 05 08,0 06,9 |
07,4 |
-0,4 |
07.2 |
|
|
||||||
|
2 |
|
78 00 |
06,8 |
07,2 |
07,0 |
258 00 08,0 |
10,1 |
09,6 |
-2,6 |
08.3 |
11 55 01,1 |
|||||
2 |
1 |
|
30 10 47,1 47,6 |
47,4 |
210 10 50,0 |
50,1 |
50,0 |
-2,6 |
48,7 |
|
|
||||||
|
2 |
|
108 05 |
50,5 |
51,8 |
51,2 |
288 05 52,3 |
51,0 |
51,6 |
-0,4 |
51,4 |
77 55 02,5 |
|||||
3 |
1 |
|
60 15 14,1 |
15,7 |
14,9 |
240 15 16,1 |
14,3 |
15,2 |
-0,3 |
15.0 |
|
|
|||||
|
2 |
|
138 10 16,1 |
15,4 |
15,8 |
318 10 18,9 |
18,0 |
18,4 |
-2,6 |
18.1 |
77 55 03,1 |
||||||
4 |
1 |
|
90 20 |
19,1 |
20,0 |
19,4 |
270 20 25,2 |
25,0 |
25,1 |
-5,7 |
22,2 |
|
|
||||
|
2 |
|
168 15 25,9 24,6 |
25,2 |
348 15 30,9 29,9 |
30,4 |
-5,2 |
27,8 |
77 55 05,6 |
||||||||
5 |
1 |
|
120 25 |
40,8 |
40.4 |
40,6 |
300 25 41,4 |
41,9 |
41.6 |
-1,0 |
41,1 |
|
|
||||
|
2 |
|
198 20 |
40,1 |
38.5 |
39,3 |
18 20 43,1 44,3 |
43.7 |
-4,4 |
41,5 |
77 55 00,4 |
||||||
6 |
1 |
|
150 30 |
39,9 |
39.0 |
39,4 |
330 30 40,4 |
41,0 |
40,7 |
-1,3 |
40,0 |
|
|
||||
|
2 |
|
228 25 |
45,0 |
46.1 |
45,6 |
48 25 48,0 |
48,6 |
48,4 |
-2,8 |
47,0 |
77 55 07,0 |
|||||
|
Контроль: наибольший размах значений измеряемого |
||||||||||||||||
угла |
|
Др < |
8". Для каждой |
серии |
измерений |
вычислить: |
|||||||||||
ш. |
|
= livy,] |
- |
среднюю |
квадратическую |
|
погрешность |
||||||||||
|
р |
|
V |
п-1 |
|
|
|
|
|
|
|
|
|
т'р |
|
|
|
измерения |
угла |
одним |
приемом и |
Mim,p = |
t |
=, |
где |
||||||||||
|
= |
|
Pi - |
Pep ~ отклонения значений углов р в i-м приеме от |
|||||||||||||
среднего в данной серии измерений. |
|
|
|
|
|
||||||||||||
|
Окончательное значение Шр: |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
т р |
т' |
+т'^ |
+ ... + га' |
|
|
|
(77) |
||||
где N - количество серий измерений. |
|
|
|
|
|
|
|||||||||||
Рср = ^ |
|
= 77°55'03,3*, |
|
|
|
|
Mm,p = - ^ = = 0,8', |
||||||||||
размах значений измеряемого угла Ар = 6,6". |
|
|
|
|
|||||||||||||
155
Вывод: среднее значение угла равно Рср = 77°55'03,3", средняя квадратическая погрешность измерения угла одним приемом составила Шр = 2,6", погрешность Мт р= 0,8", размах значений угла в данной серии Др = 6,6" > Ар доп = 6" (при полевых измерениях Лрдоп = 8").
Контрольные вопросы
1.Методы измерения горизонтальных углов в геодезии.
2.Приборные погрешности при измерении горизонтальных углов и меры по их устранению или снижению.
3.Методические погрешности при измерении горизонтальных углов и меры по их устранению или снижению.
4.Погрешности, возникающие за счет влияния внешних условий.
15. ИССЛЕДОВАНИЯ СВЕТОДАЛЬНОМЕРОВ
Цель работы: исследование значений постоянной поправки и контрольного отсчета.
Приборы и принадлежности: светодальномеры СТ5, 2СТ10 или 4СТЗ в комплекте, рулетка типа ОПК2-50АНТ/1.
Содержание и порядок выполнения работы
Благодаря высокой точности и стабильности результатов измерений, а также возможности их непосредственной связи с ЭВМ, светодальномеры практически вытеснили аналогичные по точности оптические приборы для измерения расстояний.
Вообще говоря, принцип действия всех светодальномеров основан на измерении времени прохождения светового сигнала от источника излучения до отражателя и обратно.
Очевидно, что расстояние D и время прохождения t светового сигнала связаны между собой выражением:
Vt |
(78) |
D = y , |
где V = С/п - скорость распространения света в реальной атмосфере, п - показатель преломления среды прохождения сигнала.
В зависимости от метода измерения времени светодальномеры могут быть разделены на импульсные, фазовые, частотные и комбинированные (например, импульсно-фазовые). Изза недостаточно короткого фронта импульса и сложности непосредственного определения поправки в полевых условиях импульсные светодальномеры до недавнего времени не обеспечивали требуемой для геодезии точности. В настоящее время известны зарубежные импульсные безотражательные светодальномеры DR200+, используемые в электронных тахеометрах Trimble 5600. В них при каждом измерении в результате усредняется порядка 20 ООО импульсов [102].
157
В отечественной практике наибольшее применение нашли фазовые и фазовые с преобразованием временного интервала светодальномеры.
Принцип действия фазовых светодальномеров
Вфазовых светодальномерах используют индикатор разности фаз. Известны два типа фазовых светодальномеров: с плавно изменяющейся частотой и с фиксированной частотой.
Вфазовых светодальномерах с плавно изменяющейся частотой изменяют частоту модуляции светового сигнала f до тех пор, пока на расстоянии от приемопередатчика до отражателя и обратно не уложится целое количество N волн X или полуволн:
D = U n . |
(79) |
Для разрешения неоднозначности при подсчете количества волн измерения выполняются на нескольких частотах (двух
или трех). |
|
|
Фазовый метод с фиксированной частотой |
использован, |
|
например, в отечественном светодальномере 2СМ2 [14]. |
||
В фазовом методе расстояние вычисляют как: |
||
D = — N + |
А(р |
(80) |
2 |
2к |
|
где X - среднее значение длины волны модулирующей частоты f для реальных атмосферных условий; N - количество пол-
Д<р ных фазовых циклов в общем сдвиге фаз; т— = ДА - дробная
2к
часть фазового цикла (фазовый домер).
Для вычисления N с целью разрешения неоднозначности измерения выполняют на трех масштабных частотах модуляции: fj = 149,85 кГц, f2 = 1498,5 кГц, f3 = 14985 кГц. При этом частоту f3 вырабатывает кварцевый термостатированный генератор (ГМЧ), частоты fx и f2 получают путем деления частоты f3 в делителях частот.
158
Рис. 108. Структурная схема светодальномера 2СМ2
В оптической схеме светодальномера 2СМ2 (рис. 109) лучи от полупроводникового арсенид-галлиевого светодиода (GaAs) 13, через конденсор 12 отражаются от полупрозрачной пластины 9 (отражает инфракрасные и пропускает видимые лучи) и направляются объективом 2 параллельным пучком на отражатель 1. Отраженный пучок света формируется объективом 2 в плоскости полевой диафрагмы 7 и далее, пройдя интерференционный светофильтр 5, попадает на фотокатод приемника излучения 4 (в 2СМ2 использован фотоэлект-
159
i k
Ф-»
Рис. 109. Оптическая схема светодальномера 2СМ2:
1 - отражатель; 2 - объектив; 3 - трипель-призма и линза блока оптического короткого замыкания (ОКЗ); 4 - фотоэлектронный умножитель (ФЭУ); 5 - интерференционный светофильтр; 6 - микрообъектив; 7 - диафрагма; 8 - зеркало; 9 - полупрозрачная пластинка; 10 - сетка нитей; 11 - окуляр;
12 - конденсор; 13 - лазерный источник излучения
ронный умножитель). Зеркало 8 выполнено в виде кольца, что позволило совместить в приемопередатчике передающую, приемную и визирную оптические системы.
Зрительная труба состоит из объектива 2, сетки нитей 10 и окуляра 11. Блок оптического короткого замыкания (ОКЗ) содержит трипель-призму с положительной линзой 3, которые фокусируют пучок лучей в плоскости диафрагмы 7.
Длину измеренного расстояния вычисляют по формуле [30]:
(81)
где D и D0K3 - средние арифметические значения из отсчетов при измерении дистанции и ОКЗ соответственно, К - количество приемов. В окончательный результат измерения вводят поправки за температуру, давление и приборную поправку.
Из-за непрерывного излучения светодиода фазовые светодальномеры имеют ограниченные диапазоны измеряемого расстояния (в светодальномере 2СМ2 до 2000 метров).
160
Средняя квадратическая погрешность измерения расстояния светодальномером 2СМ2 равна 20 мм.
Принцип действия фазовых светодальномеров
спреобразованием временного интервала
Вфазовых светодальномерах с преобразованием временного интервала измеренное расстояние вычисляется по временному сдвигу между опорным импульсом и импульсом, возвращенным от отражателя как [32, 40, 52]:
2D
(82)
При этом анализируется установившийся процесс следования опорных импульсов и импульсов с дистанции с масш-
1 |
V |
табной частотой, равной F = — = —, где X - длина волны, Т - |
|
Т |
Я |
период следования импульсов.
Диаграмма последовательности импульсов приведена на рис. 110.
Временной сдвиг между опорным сигналом и сигналом с дистанции тс при любой дальности не может быть больше периода Т. Для однозначности измерения дальности длина вол-
U(t) |
|
Тп |
|
|
Т — • |
|
|
|
1 |
I |
1 |
to |
T + t0 |
|
Тп + tо |
4 |
т3 •I |
|
I |
|
T + U |
|
Tn + tb |
Рис. 110. Диаграмма временной последовательности импульсов опорного (ОКЗ) канала (а) и сигнальных импульсов (б)
161
ны периодического сигнала должна быть больше, чем 2Dmax, п - количество периодов.
Использование опорного канала ОКЗ позволяет устранить влияние изменений внутри прибора - электронные задержки (например, из-за изменения температуры и старения элементов схемы).
На практике измеряют не временной сдвиг, равный тс = = (Т + tK) - (Т + t0), а время задержки сигнального импульса, равное т3 = {(Тп + tk) - t0}.
Фазовый метод с преобразованием временного интервала использован в отечественных светодальномерах СТ5, 2СТ10 и 4СТЗ.
Структурные схемы их между собой отличаются незначительно, подробно описаны в [30, 34, 40].
Оптические схемы светодальномеров приведены на рис. 111, 112, 115.
/
Рис. 111. Оптическая схема светодальномера СТ5:
1 - объектив; 2 - микрообъектив; 3 - коллектив; 4 - |
световод; |
|
5 - микрообъектив; 6 - фильтр; 7 - |
ФЭУ; 8 - призма; 9, И, |
13 - диафрагмы; |
10 - шторка; 12 |
- приемник излучения |
|
162
Рис. 112. Оптическая схема светодальномера 2СТ10:
1 - объектив; 2 - источник излучения; 3 - конденсор; 4 - диафрагма-переключатель "ОКЗ - Дистанция"; 5 - зеркало;
6 - трипель-призма; 7 - микрообъектив; 8 - призма; 9 - аттенюатор; 10 - коллектив с полевой диафрагмой; И - световод; 12 - ФЭУ; 13,19 - оборачивающая система; 14 - сетка нитей; 15 - окуляр; 16 - интерференционный фильтр; 17 - призма АР-90°; 18 - линза; 20 - светодиод; 21 - зеркало; 22 - призма; 23 - защитное стекло; 24 - отражательная призма; 25 - объектив оптического центрира;
26 - сетка; 27 - окуляр оптического центрира; 28, 29, 30, 31 - диафрагмы
Для разрешения неоднозначности в светодальномере СТ5 измерения выполняются на двух частотах: fMl = 14985,5 кГц и fM2 = 149,855 кГц, в светодальномере 2СТ10 используются три частоты: fMl = 14985,5 кГц, fM2 = 149,855 кГц, fM3 = 1,49855 кГц. Точная масштабная частота fMl обеспечивает масштаб измерения 10 метров; разность результатов измерения на частотах fMl и fM2 эквивалентна результату измерения на разностной частоте (fMl - fM2) - при этом масштаб измерения 200 метров; разность результатов измерения на частотах fMl и fM3 эквивалентна результату измерения на разностной частоте (fMl - fM3) - при этом масштаб измерения 6000 метров.
В светодальномере СТ5 (см. рис. 111) световой поток от полупроводникового светодиода 12, пройдя диафрагмы 11
163
и 9 шторки 10 и отразившись от призмы 8, в режиме "Дистанция" объективом 1 направляется на отражатель.
Отраженный световой поток фокусируется в плоскости коллектива 3 с полевой диафрагмой и через световод 4, микрообъектив 5, интерференционный светофильтр 6, уменьшающий фоновую засветку, попадает на фотокатод ФЭУ 7. В режиме "ОКЗ" шторка поворачивается, направляя через диафрагмы 13 и 9 световой поток через микрообъектив 2 непосредственно в плоскость полевой диафрагмы коллектива 3, далее - как в режиме "Дистанция". Интервал времени между каждым опорным импульсом и следующим за ним сигнальным импульсом пропорционален измеряемому расстоянию.
Средняя квадратическая погрешность измерения расстояния светодальномером СТ5 равна (10+510~6D) мм, где D - измеряемое расстояние в километрах. Общий вид светодальномера СТ5 приведен на рис. 113.
В отличие от светодальномера СТ5 в светодальномере 2СТ10 (см. рис. 112) визирная ось и ось дальномерного бло-
Рис. 113. Светодальномер СТ5:
1 - наводящий винт алидады; 2 - разъем для кабеля питания; 3 - объектив приемопередатчика; 4 - объектив визира предварительного наведения
на отражатель; 5 - стрелочный индикатор уровня сигнала от отражателя; 6 - ручка установки контрольного отсчета (КО); 7 - ручка регулировки уровня
сигнала; 8 - разъем микротелефона; 9 - цифровое табло; 10 - переключатель режимов "контроль", "грубо", "точно"; 11 - переключатель "выкл", "наведение", "счет"; 12 - вертикальный наводящий винт;
13 - окуляр оптического центрира
164
ка совмещены. Зрительная труба визирного канала состоит из объектива 1, зеркала 5, призмы 22, оборачивающей системы 13 и 19, светодиода 20 (в темное время освещает сетку нитей), зеркала 21, диафрагм 28, 29, 30, сетки нитей 14 и окуляра 15.
В режиме "Дистанция" световой поток от излучателя 2 через конденсор 3 и диафрагму "Дистанция-ОКЗ" 4 с помощью призмы 8 и половины объектива 1 направляется на отражатель. Отраженый световой поток через другую половину объектива 1, призму 8, аттенюатор 9 (ослабляет световой поток при измерениях малых расстояний), коллектив 10 с полевой диафрагмой, световод 11, объектив 18, призму 17 и интерференционный фильтр 16 попадает на фотокатод ФЭУ 12.
В режиме "ОКЗ" световой поток от излучателя 2 через конденсор 3, диафрагму "Дистанция-ОКЗ" 4, призму 8, объектив 7, трипель-призму 6 и аттенюатор 9 попадает на коллектив 10 с полевой диафрагмой, далее - как в режиме "Дистанция". Положение диафрагмы 4 зависит от режима измерения ("Дистанция" или "ОКЗ").
Оптический центрир состоит из объектива 25, сетки 26 и окуляра 27. Изображение центра пункта рассматривают через призму 24, диафрагму 31 и защитное стекло 23.
Средняя квадратическая погрешность измерения расстояний светодальномером 2СТ10 равна (5+3-10 D) мм. Самые
лучшие результаты измерений получают в ветреную прозрачную погоду без солнца.
Общий вид светодальномера 2СТ10 приведен на рис. 114. Методика работы со светодальномерами СТ5 и 2СТ10 практически одинакова, поэтому рассмотрим ее на примере
светодальномера 2СТ10 (см. рис. 114):
1)центрировать и горизонтировать светодальномер и отражатель над пунктами хода,
2)установить переключатель режимов работы 17 в положение "выкл",
3)подключить источник питания с напряжением (12 -s-16) В,
4)вращением окуляра 15 установить четкое изображение сетки нитей,
5)перевести переключатель режимов работы 17 в положение "контр", при включении на табло индицируются знаки "8", иначе нужно заменить источник питания,
165
i |
2 |
4 |
Рис. 114. Светодальномер 2СТ10:
1 - цифровое табло; 2 - лицевая панель; 3 - ручка регулировки контрольного отсчета; 4 - ручка подсветки; 5 - ручка "сигнал"
(регулировка уровня сигнала); 7 - переключатель "наведение-счет"; 8 - вертикальный наводящий винт; 9 - закрепительный винт;
10 - юстировочный винт; И - стойка; 12 - фиксатор; 13 - горизонтальный наводящий винт; 14 - закрепительный винт;
15 - окуляр визирного канала; 16 - кнопки установки поправок за температуру и давление (pt); 17 - переключатель режимов работы
6)установить режим ввода значения атмосферного давления, расположив переключатель 17 в положение "р",
7)установить режим ввода значения температуры, расположив переключатель 17 в положение "t"; значения "р" и "t" изменить кнопками 16, при этом кратковременное нажатие кнопок изменяет значение параметра на единицу, при длительном нажатии значения изменяются непрерывно,
8)при измерении расстояний до 500 метров рекомендуется применять однопризменный отражатель,
9)установить переключатель режимов работы 17 в положение "3",
166
1 0) установить наводящие винты в среднее положение и ослабить закрепительные винты,
1 1) наблюдая в окуляр зрительной трубы, навести светодаль номер на центр отражателя и зафиксировать его закрепительными винтами,
12) установить переключатель 7 в режим " наведение" и наво дящими винтами совместить центр призмы отражателя с цент ром сетки нитей (у СТ5 на близком расстоянии необходимо учитывать расстояние между визирной и дальномерной осями), наличие сигнала сопровождается звуком и высвечиванием сегментов индикатора уровня сигнала (у СТ5 начинает мигать разрядная точка), устанавливая такой режим работы ("1", "2", "3"), чтобы максимум не выходил за пределы шкалы индикатора,
13) перевести рукоятку 7 в положение "счет" и трижды отсчитать результаты измерений на табло индикатора, как
правило, пропустив первый |
отсчет. |
|
Результат измерений наклонного расстояния в мм вычис- |
||
лить по формуле [77]: |
|
|
DH = Dcp + ADU |
+ ADn + ADf + AD6ko, |
(83) |
где Dc p - среднее арифметическое значение отсчетов на табло, мм; ADn - поправка за циклическую погрешность, мм (определить по графику последней аттестации светодальномера); ADN - поправка за метеоданные, мм; ADF - поправка за температурное изменение частоты задающего генератора, мм; AD6ko - поправка, учитывающая дрейф показаний прибора при работе по блоку контрольного отсчета, мм, вычисляется по формуле:
AD6ko = D 6 k o - D 6 k o h 3 M , |
(84) |
где D6 ko - значение контрольного отсчета по паспорту; D6 K O ИЗМ - результат измерений по блоку контрольного отсчета.
В настоящее время серийно выпускается светодальномер 4СТЗ повышенной точности (средняя квадратическая погрешность измерения наклонного расстояния (3+310~6D) мм)), диапазон измерения с однопризменным отражателем до 1000 м, дискретность отсчитывания 1 мм, прибор имеет встроенный
167
микропроцессор с внутренней памятью 512 Кбайт, а также разъем для подключения кабеля к компьютеру.
В светодальномере 4СТЗ (см. рис. 115) световой поток от лазерного источника излучения 1, сформированный конденсором 2, в режиме "ОКЗ" проходит через световод (стекловолокно) 3, диафрагму 4, полулинзы 5 и 6, аттенюатор 7 и после фильтра 8 через световод 9 попадает на чувствительную площадку фотодиодного приемника излучения 10, в режиме "Дистанция" световой поток через другое отверстие диафрагмы 4 попадает на призму И и через объектив 12 уходит на отражатель, отраженный световой поток поступает на приемник излучения 10.
Принцип действия дальномерной части прибора практически не отличается от рассмотренных выше светодальномеров
Ю
Рис. 115. Оптическая схема светодальномера 4СТЗ:
1 - лазерный источник излучения; 2 - микрообъектив-конденсор; 3 - световод; 4 - диафрагма; 5,6 - полулинзы; 7 - аттенюатор; 8 - фильтр;
9 - стекловолокно; 10 - приемник излучения (ЛФД); 11 - призма; 12 - объектив; 13 - диафрагмы
168
СТ5 и 2СТ10. Однако, для увеличения точности измерений, в передающей части 4СТЗ использованы три масштабных частоты: fj= 14998,5 мГц (используется для измерения в пределах 10 м), f2 = fj - 500 кГц (используется для измерения в пределах 300 м), f3 = fj - 25 кГц (используется для измерения в пределах 6000 м).
Функциональная схема приемо-передающей части светодальномера показана на рис. 116.
Рис. 116. Функциональная схема приемо-передающей части светодальномера 4СТЗ
Как видно из рис. 116 используемый в схеме гетеродин вырабатывает также три частоты fri, каждая из которых соответственно меньше на 1,5 кГц. После смесителей масштабных и гетеродинных частот получается низкочастотный сигнал синусоидальной формы, который затем заполняется для считывания разности фаз между сигнальными и опорными импульсами импульсами частотой порядка 7,5 мГц.
169
В качестве источника излучения используется полупроводниковый лазер типа ИЛПН-820 (или ИЛПН-203), приемником излучения служит лавинный фотодиод (ЛФД) типа С3092Е. Использование ЛФД позволило повысить дальность действия до 6000 м. В светодальномере 4СТЗ применено два аттенюатора (ручной и автоматический (от датчика сигнала), индикация уровня сигнала обеспечивается яркостью светодиода (при большом сигнале яркость выше) и метками на табло (как в 2СТ10).
Функциональные возможности светодальномера 4СТЗ [76]
На передней панели прибора расположены клавиши управления:
(^on/off) |
- |
включение и выключение прибора, |
menu |
- |
выбор режима работы, выход из режима после |
|
|
проведения измерений с переходом на предыду- |
|
|
щий уровень, |
ENT |
- |
подтверждение выбора подпрограмм, |
A meas |
- |
начало измерений или перемещение по табло |
|
|
вверх, |
REG V |
- |
запись результатов измерений или перемещение |
|
|
по табло вниз. |
Нажатие клавиш сопровождается звуковым сигналом. Кроме того, на передней панели расположен приемник ИК -
излучения для дистанционного управления прибором с пульта управления.
Заложенное программное обеспечение позволяет:
1)ввести поправки метеоданных и постоянную отражателя,
2)выдать характеристику точки стояния (номер и код станции, высоту прибора, номер начального направления и координаты X, Y, Н),
3)ввести номер точки визирования и высоту отражателя,
4)ввести дату и время работы,
5)выбрать единицы измерения (углы - градусная мера или гоны, линии - метры или миллиметры),
6)выбрать один из режимов измерений (основной режим, режим непрерывного измерения или режим быстрого измерения),
170
7)при установке светодальномера на теодолит вручную ввести значения вертикальных углов и вычислять горизонтальные проложения,
8)создать отдельные файлы для хранения результатов измерений,
9)осуществить просмотр и удаление результатов измерений. Подробная инструкция по работе со светодальномером
4СТЗ описана в Руководстве по эксплуатации [76]. Метрологическую аттестацию светодальномеров типа СТ
следует выполнять на эталонных базисах один раз в два года [85], испытания и поверки - один-два раза в год [49, 77].
Поверки светодальномеров
Поверки разных типов светодальномеров могут отличаться друг от друга, но в общем случае необходимо выполнить следующие поверки [20, 30, 45, 54, 86]:
1. Внешний осмотр прибора. Проверить плавность вращения наводящих и подъемных винтов, сохранность оптических деталей и др.
2.Поверка установочных уровней и оптического центрира.
3.Поверка на функционирование.
4.Поверка правильности показаний контрольных приборов.
5.Поверка частоты кварцевого генератора.
6.Исследование постоянной поправки светодальномера.
7.Исследование погрешности измерения расстояний.
8.Исследование циклической погрешности.
Юстировка и ремонт
1. Условие: визирная ось визирного канала должна быть
параллельна оси приемо-передающей системы.
Поверка: установить однопризменный отражатель на расстоянии примерно 150 метров, навести светодальномер по максимуму сигнала. Если при этом центр окружности сетки зрительной трубы смещен относительно центра отражателя более, чем на половину малой окружности (в светодальномере СТ5), или перекрестие сетки визирного канала не совпадает с изображением призмы отражателя более, чем на половину ширины биссектора (в светодальномере 2СТ10), необходимо приборы отъюстировать. Юстировку осуществить смещением сетки нитей до совмещения ее центра с изобра-
171
жением центра призмы отражателя в светодальномере 2СТ10 (в светодальномере СТ5 - разворотом оптического визира).
2.Неисправности, связанные с отсутствием напряжения питания на входе светодальномера. Причины: перегорел предохранитель источника питания, обрыв соединительного кабеля, нарушение контакта в разъемах.
3.В зрительной трубе не видно изображения или оно плохого качества. Одна из возможных причин - запотевание оптики. Необходимо протереть наружные поверхности объектива и окуляра мягкой салфеткой, если это не помогает - просушить прибор в теплом помещении.
4.Разборка вертикальной оси вращения прибора. Разборку осуществляют, например, для чистки и смазки.
Для этого необходимо положить светодальномер на бок, вывинтить с оси гайку с защитным стеклом, ограничительную гайку и четыре винта, скрепляющих нижнюю крышку с основанием. Затем, придерживая крышку, следует установить светодальномер в подставку, закрепить его и осторожно извлечь вертикальную ось из втулки.
Сборка после чистки и смазки осуществляется в обратном порядке.
Исследование циклической погрешности светодальномера
Циклическая погрешность в светодальномерах проявляется на основной частоте при старении элементов электроники, проникновении электромагнитных или оптических помех в приемный канал, снижающих коэффициент сигнал/шум, и, как следствие, взаимном влиянии масштабируемых частот друг на друга. При соотношении сигнал/шум равном 100 циклическая погрешность достигает 16 мм [32], при уменьшении соотношения сигнал/шум циклическая погрешность прямо пропорционально увеличивается. Поэтому ее исследование является одной из основных задач при испытании светодальномера.
При исследованиях циклической погрешности светодальномеров СТ5 и 2СТ10 на местности или в помещении в пределах от 2 до 26 метров от приемо-передатчика размещают одиннадцать точек, расстояния между которыми 1 м трижды измеряют рулеткой с погрешностью не более, чем 1,5 мм [30].
172
При выполнении работы можно воспользоваться штриховой рейкой, установленной вдоль визирной оси на высоте прибора, при этом отражатель переставлять по штрихам рейки, а расстояние до первой точки измерить рулеткой.
Все расстояния измеряют светодальномером сначала одним приемом, затем выполняют второй прием.
Результаты исследований светодальномера 2СТ10 № 17718
при контрольном отсчете, равном |
116, приведены в табл. |
16. |
|||
|
|
|
Т а б л и ц а |
16 |
|
Дата: 13.11.2002 г. |
|
|
Прибор 2СТ10 № 17718 |
||
Исследователь: Забелин Д.А. |
|
|
|
||
D0, мм |
|
DH3M, мм |
DH3MCP> м м |
Р, мм |
|
1 |
2 |
|
|||
|
|
|
|
||
4989 |
4981 |
4985 |
4983 |
-4 |
|
5990 |
5976 |
5980 |
5978 |
+2 |
|
6989 |
6973 |
6975 |
6974 |
+5 |
|
7988 |
7966 |
7972 |
7969 |
+9 |
|
8987 |
8959 |
8963 |
8961 |
+ 16 |
|
9989 |
9966 |
9968 |
9967 |
+ 12 |
|
10989 |
10971 |
10971 |
10971 |
+8 |
|
11988 |
11975 |
11971 |
11973 |
+5 |
|
12989 |
12973 |
12974 |
12974 |
+5 |
|
13985 |
13976 |
13970 |
13973 |
+2 |
|
14990 |
14980 |
14984 |
14982 |
-2 |
|
Значения циклической погрешности для каждого интерва- |
|||||
ла вычисляют |
как: |
|
|
|
|
|
|
A D ^ D ^ D o - t i , |
(85) |
||
где D0 - результат |
измерения интервала рулеткой, |
|и - |
по- |
||
правка на отражатель (для отражателей ПО УОМЗ она равна - 10 мм).
По результатам исследования строят график поправок за циклическую погрешность Р = - ADU (рис. 117).
173
Исследование контрольного отсчета
Приборную поправку Р необходимо исследовать на расстоянии, где циклическая кривая пересекает среднее значение (7 метров, что видно из графика (см. рис. 118)).
Для выявления Р = 0 необходимо изменить значение контрольного отсчета относительно паспортного на ±10 единиц и измерить расстояние Di5 вычислить приборные поправки, нанести их на график, интерполированием между точками, где прямая пересекает ось координат контрольных отсчетов.
Рис. 118. График исследований контрольного отсчета:
а - для СТ5, б - для 2СТ10
174
Результаты измерений указанными выше светодальномерами приведены в табл.17 и на рис. 118.
|
|
|
|
|
Т а б л и ц а 17 |
||
D0 |
К |
СТ5 |
|
К |
2СТ10 |
|
|
Е>и |
Рп |
Е>и |
Р21 |
||||
|
|||||||
7,149 |
92 |
7,145 |
+4 |
107 |
7,131 |
+ 16 |
|
|
97 |
7,152 |
-3 |
119 |
7,146 |
+3 |
|
|
105 |
7,161 |
-12 |
128 |
7,158 |
-9 |
|
|
112 |
7,165 |
-16 |
140 |
7,161 |
-12 |
|
Оперативное исследование постоянной поправки без учета циклической погрешности заключается в измерении произвольного расстояния в целом и по частям [49].
Вывод: у исследуемого светодальномера 2СТ10 № 17718 циклическая погрешность AD4 = ±10 мм, значение контрольного отсчета, при котором постоянная поправка Р2 = 0, равно 122 для используемого уголкового отражателя.
Контрольные вопросы
1.Принцип действия фазовых и импульсных светодальномеров.
2.Методика измерения расстояний светодальномерами СТ5 и 2СТ10.
3.Поверки и исследования светодальномеров.
16.ЭЛЕКТРОННЫЕ ТАХЕОМЕТРЫ
ИЛАЗЕРНЫЕ РУЛЕТКИ: УСТРОЙСТВО, ПОВЕРКИ, НЕИСПРАВНОСТИ,
МЕТОДИКИ РАБОТЫ
Цель работы: изучение устройства и методики работы с электронными тахеометрами и лазерными рулетками.
Приборы и принадлежности: электронный тахеометр в комплекте, лазерная рулетка.
Устройство электронных тахеометров
Современное состояние оптики, механики и электроники позволило создать геодезические приборы - электронные тахеометры и лазерные рулетки, с помощью которых в полевых условиях можно получить информацию об измеряемых горизонтальных и вертикальных углах и расстояниях, автоматически выполнить необходимые вычисления по плановому и высотному положению ситуации [21]. При наличии компьютеров процесс может быть автоматизирован, включая получение готовой карты местности. Возможность занесения в запоминающие устройства (ЗУ) допустимых погрешностей измерений (например, циклической погрешности дальномера, коллимационной погрешности, отклонений места нуля, отклонений оси вращения от отвесной линии за счет введения двухкоординатных электронных уровней и др.) позволяет повысить точность и производительность измерений.
Встроенное программное обеспечение позволяет выполнить следующие геодезические задачи: обратную засечку, уравнивание теодолитного хода, измерение высот недоступных объектов, вынос в натуру координат точек и линий, вычисление площадей, разбивку кривых и т.д.
На российском рынке тахеометры представляют сегодня такие известные фирмы, как: Leica (Швейцария), Sokkia, Topcon, Nikon и Pentax (Япония), Trimble Navigation (США), Opton (Германия), АГА (Швеция), а также ФГУП "УОМЗ" (Россия, г. Екатеринбург) и др.
176
УОМЗ выпустил тахеометры 2Та5 со встроенной памятью на 5000 точек и ЗТа5Р, который может работать совместно с программным комплексом "CREDO", обеспечивая безбумажную технологию; тахеометр ЗТа5Р, в отличие от своих предшественников, имеет компенсатор при вертикальном круге и электронный уровень. Тахеометр ЗТа5РМ имеет два дисплея и лазерный центрир.
Принципы измерения расстояний практически не отличаются от работы светодальномеров; при измерении углов используют кодовые и инкрементальные (накопительные) преобразователи, принцип действия которых описан в многочисленной литературе [1, 18, 51, 72, 81, 69, 96, 102].
В отечественных тахеометрах типа Та5 и ТаЗМ используются преобразователи накопительного типа. Здесь рабочей мерой служит нанесенный на стеклянную подложку растровый диск с радиальными штрихами (рис. 119). На стеклянной подложке нанесены две штриховые дорожки с равными угловыми интервалами прозрачной и непрозрачной частей, штрихи одной дорожки сдвинуты относительно другой на четверть периода Т, благодаря чему определяется направление перемещения алидады (реверс). Средний диаметр диска равен 85 мм, количество штрихов растра N = 10 000. Прибор не имеет "абсо-
Рис. 119. Растровый диск
177
лютного нуля , нулевое направление задается в момент включения прибора, после выключения прибора его ориентация в горизонтальной плоскости в памяти не сохраняется.
Угловое перемещение прибора преобразуется в амплитуду, фазу, время или частоту электрического сигнала, затем электрическими схемами - в цифровой код. В преобразователях накопительного типа вычисляется целое число периодов растра и оценивается его дробная часть, заключенная между двумя направлениями угла. При этом целое число периодов вычисляется в канале грубого отсчета, дробная часть - в канале точного отсчета.
Рассмотрим оптическую схему преобразователя ТаЗМ (рис. 120). Свет от светодиода 1 через конденсор 2 и призму 3 освещает штрихи растрового диска 4; изображение штрихов с помощью оптического мостика (призма 5, микрообъективы 6 и пентапризма 7) передается на противоположную сторону растрового диска и через диафрагму 8 считывается приемниками излучения (ПИ) 9. Увеличение оптического мостика (5 = 1,0101, поэтому изображение, полученное на противоположной стороне растрового диска, шире штрихов примерно на 1/100. Такое сопряжение называют нониусным.
Рис. 120. Принципиальная схема считывания информации с растрового преобразователя тахеометра ТаЗМ:
1 - светодиод; 2 - конденсор; 3 - призма БР-1800; 4 - растровый диск; 5 - призма АР-90°; 6 - микрообъективы; 7 - пентапризма; 8 - диафрагма; 9 - приемник излучения
178
Период растра для тахеометра ТаЗМ |
|
Т{ = 3607 10000 = 2'09,6", |
(86) |
соответственно угловой период изображения Т2 = 240,9". При вращении алидады растр и его изображение, образу-
ющие муаровую картину, перемещаются навстречу друг другу, что приводит к увеличению разрешающей способности канала грубого отсчета в два раза, тогда:
Т = T J / 2 = Г 04,8".
Угловой размер между комбинационными (муаровыми)
WW
полосами -—-— = 1°48'0,64*, благодаря чему можно ис- 2 (W2-W{)
пользовать приемник излучения с размером чувствительной площадки порядка одного миллиметра. Wx и W2 - угловые периоды растра, нанесенного на диске, и его изображения на противоположной стороне соответственно.
В тахеометре ТаЗМ используется четырехплощадочный фотодиод ФД20КП (см. рис. 120, поз. 9), размер окна щелевой диафрагмы 8 при этом равен 0,9 мм.
Оптическая схема при вертикальном круге аналогична показанной на рис. 120, однако оптический мостик (элементы 5, 6, 7) расположен на маятниковом подвесе и является одновременно компенсатором наклонов прибора. Вибрации компенсатора гасятся с помощью магнитоиндукционного демпфера.
На рис. 121 приведена структурная схема узла считывания информации.
Пространственный сдвиг окон диафрагмы 8 (см. рис. 120) позволяет на выходе чувствительных площадок приемника
излучения иметь токи |
вида: |
|
l{ = I0sin ф, I2 = IQCOS ф, |
|
|
I3 = -I |
0sin ф, I4 = -I0cos ф, |
(87) |
где 10 - амплитуда сигнала.
Противофазные сигналы поступают на входы операционных усилителей А1 и А2, в результате их попарного сложения
179
Рис. 121. Принципиальная схема первичного преобразователя кодового датчика угла
на выходе усилителей амплитуда сигналов удваивается, в точках А и В имеют напряжения соответственно (рис. 122):
ивых1= 2Usin <р, \
ив ых2= 2UCOS ф. J
^вых |
i i |
|
|
|
|
|
|
ивых 1 |
Х |
/ |
|
|
|
|
|
|
- ^ Г |
|
ивых2 |
|
|
||
|
|
|
|
|
|
|
|
|
I |
у |
\ |
I |
|
|
|
0 ° |
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
|
9 0 ° |
|
|
1 8 ( Г Ч |
2 7 0 4 / |
3 6 0 ° |
|
|
|
|
|
V |
I |
> |
|
Рис. 122. Квадратурные измерительные сигналы
Кроме того, попарное сложение (балансная схема) сигналов позволяет устранить паразитное влияние фоновой засветки, старения элементов электрической схемы и нестабильность излучения источника.
180
Юстировка преобразователя угловых перемещений заключается в настройке квадратурных сигналов sin и cos после их предварительного усиления в точках А и В (см. рис. 121). Для этого один из сигналов подают на вход X, а другой на вход Y двухлучевого осциллографа. При перемещении алидады тахеометра на экране осциллографа будет смещаться точка. При правильных сдвигах фаз между сигналами (90°) и равных их амплитудах траектория смещения (фигура Лиссажу) будет иметь вид окружности диаметром порядка U = 2,5 вольт (рис. 123,а).
При разных амплитудах сигналов и сдвиге фаз между ними 90° (см. рис. 122) окружность вырождается в эллипс, оси которого совпадают с осями координат осциллографа. При сдвиге фаз, отличном от 90°, фигура Лиссажу наклоняется на соответствующий сдвигу фаз угол (см. рис. 123,6). Дальнейшая настройка преобразователя заключается в юстировке положения призм и микрообъективов оптического мостика (поз. 5, 6, 7 на рис. 120). Окончательная настройка амплитуд квадратурных сигналов может быть осуществлена переменными резисторами промежуточных усилительных каскадов. При электронном методе считывания как таковое понятие рена отсутствует, при этом на погрешность измерения оказывают влияние эксцентриситеты лимба и алидады. Их выявляют по изменению коллимационной погрешности на разных участках горизонтального круга.
Для этого зрительная труба электронного тахеометра фокусируется на бесконечность, тахеометр устанавливается на
n U ^ t и
Рис. 123. Фигуры Лиссажу
181
прецизионный поворотный столик, напротив располагается (труба в трубу) коллиматор. Совмещая сетки нитей коллиматора и тахеометра, при двух положениях зрительной трубы тахеометра (J1 и П) вычисляют коллимационную погрешность. Повернув столик с тахеометром на 15°, снова совмещают его сетку нитей с сеткой нитей коллиматора и вычисляют коллимационную погрешность. Измерения выполняют в пределах полного оборота электронного тахеометра через 15°. Кроме того, наличие эксцентриситетов может быть выявлено по изменениям углового положения фигуры Лиссажу на экране осциллографа.
При перемещении алидады происходит подсчет целых периодов в канале грубого отсчета (ГО), точный отсчет выполняется при неподвижной алидаде.
В канале точного отсчета сигналы интерполируются, получая 128 счетных импульсов на период Т, следовательно один отсчетный индекс канала точного отсчета соответствует 0,5 угловым секундам.
Используемая в тахеометре ТаЗМ оптическая схема имеет ряд существенных недостатков:
1)отсутствует нуль-метка инициализации кругов, обнуление счетчика происходит при включении прибора,
2)превышение скорости вращения алидады приводит к сбоям в работе, которые можно выявить только при повторной ориентации прибора на опорное направление,
3)жесткие требования к юстировке оптического мостика, разъюстировка оптического мостика приводит к изменению ширины муаровой полосы и, как следствие, изменению амп-
литуд и сдвигу фаз, отличному от 90°, измерительных сигна-
л о в и в ы х1 и ивых2>
4)разъюстировка преобразователя перемещений приводит
кнакапливающейся погрешности измерений, которую выявляют по многократному замыканию горизонта при визировании на одну и ту же марку.
Указанные выше недостатки частично устранены в тахеометрах 2Та5, ЗТа5 и 4Та5. В части измерения расстояний в указанных выше тахеометрах использован фазовый метод с измерением временного интервала аналогичный светодальномеру СТ5.
182
В угловых же преобразователях используют схему с двумя сопряженными растрами (в 2Та5 - с односторонним считыванием, в ЗТа5 - с двусторонним считыванием). Схема преобразователя угла приведена на рис. 124.
| * |
* |
J X T T X T ] |
|
|
[ZHHk^ |
иг
Рис. 124. Принципиальная схема первичного преобразователя с двумя сопряженными растрами:
1 - источники излучения; 2 - конденсоры (не во всех схемах); 3 - измерительный подвижный растр (лимб); 4 - индикаторные растровые
решетки; 5 - приемники излучения (фотодиоды)
Индикаторные растры имеют структуру, аналогичную измерительному растру, но окна для получения квадратурных сигналов sin и cos пространственно сдвинуты на к/2. Зазоры между измерительным и индикаторными растрами должны быть соизмеримы с периодом растра. На лимбе нанесена специальная нуль-метка, которая инициализируется при включении прибора и может служить началом отсчета.
В настоящее время наибольшей популярностью у геодезистов пользуются электронные тахеометры, в которых при измерении углов в качестве рабочей меры используют кодовые шкалы, а считывание информации с них осуществляется с помощью ccd-ceHcopoB.
Одним из первых таких тахеометров был электронный тахеометр НР-3820А фирмы "Хьюлетт Паккард" (США). На рис. 125 приведена принципиальная схема его углового преобразователя [1, 81].
183
о о |
^ |
ЬШЬ* <,, + А |
|
Ы Л J Л J rtV/A^ \I |
|
||
Т |
J в |
|
|
|
* |
||
Рис. 125. Принципиальная схема углового преобразователя тахеометра НР-3820 (США):
1 , 4 - диаметрально расположенные считывающие системы точного отсчета (для устранения влияния эксцентриситета);
2 - считывающая система промежуточного (средней точности) отсчета;
3 - считывающая система грубого отсчета
На рис. 126 показан измерительный кодовый диск.
Рис. 126. Измерительный кодовый диск (лимб) на стеклянной подложке
Кодовый диск содержит для грубого отсчета (с дискретностью отсчитывания 1°24'45") систему дорожек восьмиразрядного кода Грея (напротив приемника 3 на рис. 125), для отсчета средней точности (с дискретностью отсчитывания 2Г36") - дорожку с синусоидальным профилем (рис. 127) (напротив ПИ 2, см. рис. 125), для точного отсчета (с дискретностью отсчитывания 0,32") - штриховую дорожку (напротив ПИ 1, см. рис. 125).
Синусоидальная дорожка имеет 128 периодов длиной по 1080 мкм, в пределах периода установлены четыре ПИ с
184
Рис. 127. Принципиальная схема расположения приемников излучения:
а - форма синусоидальной дорожки; б - форма сигнала на выходе ПИ
1 интервалом, равным — периода синусоидальной маски. На
выходе ПИ возникают фототоки в соответствии с выражениями:
ij = i0 |
+ i sin ф; |
|
|||
12 |
= i0 |
+ i cos ф; |
(89) |
||
13 = i0 - |
i sin ф; |
||||
|
|||||
14 |
= i0 |
- |
i cos ф. |
|
|
При попарном включении ПИ (1 + 3 и 2 + 4) на выходе операционных усилителей получаются два сигнала с удвоенной амплитудой, сдвинутые относительно друг друга на 90°:
ij - |
i3 |
= 2i sin ф; |
(90) |
|
i2 - |
i4 = 2i cos ф, |
|||
|
||||
позволяющие обеспечить реверс и интерполяцию сигналов с
1 дискретностью 1000 периода синусоид маски (2 Г 36").
185
На рис. 128 в качестве примера приведена структура кодовой дорожки двоичного преобразователя угловых или линейных перемещений.
ЛСК Младший разряд
431-5 Старший разряд |
43(A) 43(B) |
Рис. 128. Структура кодовой дорожки двоичного преобразователя
На рис. 128,а показаны линейная развертка кодовой шкалы и расположение над ней чувствительных элементов (приемников излучения), схема имеет существенный недостаток: на границах светлых и темных участков шкалы возникает погрешность из-за неоднозначности считывания, достигающая единицы старшего двоичного разряда. Для устранения неоднозначности используется метод с двумя чувствительными элементами на разряд (кроме младшего), схема приведена на рис. 128,6. Здесь: если с чувствительного элемента младшего разряда считывается код "О", то сигналы для других разрядов считываются с левой колонки, если с младшего разряда считывается "1", то сигналы для других разрядов считываются с правой колонки чувствительных элементов. Метод известен как "метод двойной щетки". Кроме него существуют методы с V-образным расположением чувствительных элементов, а также двоично-сдвинутые кодовые шкалы [66, 68]. Кодовый растровый диск использован, например, в отечественном электронном тахеометре ТС600Е.
В современных электронных тахеометрах при вертикальном круге используются компенсаторы, работающие по принципу электронного уровня: ампула частично заполнена электролизной жидкостью, с противоположных сторон расположены контакты. При отвесном положении оси прибора сопротивления между контактами, расположенными на противоположных сторонах ампулы равны, при наклоне прибора электролизная жидкость с разных сторон перекрывает разные участки между контактами, соответственно изменяя со-
186
противление между ними. Информация о разных сопротивлениях учитывается микропроцессором в виде поправки за угол наклона прибора. Диапазон работы таких компенсаторов не превышает 3 минут.
Рассмотрим устройство и принцип действия дальномерного блока электронного тахеометра НР-3820А фирмы "Хьюлетт Паккард" (США).
Оптическая схема приема и передачи сигналов измерения расстояний совмещена со зрительной трубой (рис. 129). Угол поля зрения зеркально-линзового объектива равен 1,5°. Призма Пехана позволяет значительно укоротить зрительную трубу и, кроме того, служит в качестве оборачивающей системы.
В дальномерной части схемы в режиме "Дистанция" световой поток D от ИК-лазера 17 через конденсор 12 проходит прерыватель "ОКЗ-Дистанция" 16, отражается от зеркальной грани призмы 14, проходит коллимирующий компонент 15 и,
Рис. 129. Принципиальная оптическая схема зрительной трубы и канала измерения расстояний электронного тахеометра НР-3820А:
1+4 - |
зеркально-линзовый объектив (1 - объектив, 2 - зеркальный мениск, |
||
3 - куб-призма, 4 - |
|
корректирующая линза); 5 - фокусирующий компонент; |
|
6 - призма Пехана; 7 |
- |
сетка нитей; 8 - окуляр; 9 - отражатель; 10 - аттенюатор; |
|
11 |
- фильтр; 12 |
- конденсоры; 13 - ПИ; 14 - разделительная призма с |
|
|
двухсторонним отражением; 15 - коллимирующий компонент; |
||
16 - |
прерыватель; |
17 - источник излучения (полупроводниковый лазер) |
|
187
отразившись от полупрозрачного покрытия куб-призмы 3, через объектив уходит на "Дистанцию" (на отражатель). Возвращенный световой поток R через вторую половину коллимирующего компонента 15 поступает через специальный фильтр 11 и конденсор 12 на ПИ 13.
Врежиме "ОКЗ" калибровочный луч К, ослабленный аттенюатором 10, отражается от отражателя 9 и поступает на ПИ 13.
Таким образом, на ПИ 13 попеременно поступают сигналы с каналов "ОКЗ" и "Дистанция", фазы которых сравниваются в дальномерном блоке обработки сигналов.
Устройство измерения наклона прибора (компенсатор) показано на рис. 130.
Внем изменение наклона прибора выявляется изменением положения прибора относительно ртутного горизонта. Схема расположения ПИ показана на рис. 131. Для считывания случайного угла наклона прибора используются синусоидальные отверстия 1 и 7, по форме аналогичные показанным на рис.
127.ПИ 2 и 4 расположены симметрично отверстиям 1 и 7 относительно отвесной линии, параллельной оси вращения
Рис. 130. Устройство |
|
компенсатора при |
|
вертикальном круге: |
Рис. 131. Схема расположения ПИ: |
1 - ИИ; 2 - конденсор; 3 - маска; |
маска 6: 1 , 7 - освещенные синусоидальные |
4 - ПИ; 5,6 - объектив; |
отверстия; 8 - ограничительный просвет; |
7 - защитное стекло; 8 - масло; |
приемная часть 5: 2, 4 - две группы по |
9 - ртуть |
четыре ПИ; 3 - фототранзистор |
188
Рис. 132. Схема диафрагмы переключения "ОКЗ - Дистанция" электронного тахеометра 2Та5:
1 - прозрачные окна режима "Дистанция"; 2 - прозрачные окна режима "ОКЗ"
прибора. Ограничительное отверстие 8 и фототранзистор 3 служат для выдачи сигнала о наклоне прибора, превышающем диапазон действия компенсатора.
На рис. 133 приведена оптическая схема дальномерной части тахеометра 2Та5. Здесь световой поток в режиме "короткого замыкания" от светодиода 1 конденсором 2 проецируется на торце световода 3, передается в плоскость диафрагмы 4 и проходит через прорези 1 диафрагмы (см. рис. 132), отразившись от призмы 6 через аттенюатор 7, световой поток направляется на трипель-призму короткого замыкания 8, 9 и возвращается через аттенюатор 10 и фильтр 11 на световод 12, а через него в плоскость приемника излучения (фотодиод) 13. В режиме "Дистанция" световой поток через прорези 2 диафрагмы (см. рис. 132), отразившись от полупрозрачной грани куб-призмы 15 (см. рис. 133) объективом 16 направляется на отражатель (трипель-призму), возвращенный световой поток также попадает на приемник излучения 13. Зрительная труба тахеометра состоит из объектива 16, фокусирующей линзы 17, оборачивающей системы 18, сетки нитей 19 и окуляра 20.
189
Рис. 133. Оптическая схема дальномера тахеометра 2Та5:
1 - светодиод; 2 - конденсор; 3 - световод; 4,5 - диафрагма; 6 - призма АР-900; 7,10 - аттенюатор; 8,9 - трипель-призма с линзой;
[ - фильтр; 12 - световод; 13 - приемник излучения (фотодиод); 14 - линза; 15 куб-призма; 16 - объектив; 17 - фокусирующая линза; 18 - оборачивающая система; 19 - сетка нитей; 20 - окуляр; 21 - выходной зрачок
На рис. 134 в общем виде показана принципиальная схема углового преобразователя накопительного типа, на рис. 135 - принципиальная схема углового кодового преобразователя.
Рассмотрим принципиальную оптическую схему дальномерного блока электронного тахеометра 4Та5 (рис. 136). В режиме "Дистанция" световой поток от полупроводникового лазера 1 при открытой шторке 2 через призму 6, микрообъективы 7 и 8, зеркало 9, коллектив 10, отражаясь от зеркала И, уходит на призменный отражатель (на схеме не показан). Отраженный от отражателя световой поток через призмукуб 13, призму АР-90° 18, пройдя полупрозрачное покрытие призмы 19, попадает на световод (стекловолокно) 4 и после него на приемник излучения (ЛФД) 5. В режиме "ОКЗ" световой поток от источника излучения 1, отражаясь от зеркального покрытия шторки 2, через аттенюатор 20 и ромбпризму 3 сразу попадает на свеволокно 4 и на ПИ 5.
190
Рис. 134. Принципиальная схема углового преобразователя накопительного типа:
1 - источник излучения (ИИ); 2, 3 - линзы конденсора; 4 - окна индикаторной решетки, формирующие сигнал, пропорциональный синусу угла; 5 - окна индикаторной решетки, формирующие сигнал, пропорциональный косинусу угла; 6 - окно нуль-метки; 7 - окно нуль-метки на измерительном круге;
8 - измерительный круг (лимб); 9 - ПИ, сопряженные с окнами 5; 10 - ПИ, сопряженные с окнами 4; 11 - ПИ сигнала нуль-метки
кодового типа:
1 - ИИ; 2 - конденсор; 3 - окна преобразователя накопительного типа; 4 - кодовая маска; 5 - накопительный растр; 6 - ПИ накопительного преобразователя; 7 - кодовые дорожки старших разрядов считывания информации; 8 - сигнал на выходе соответствующих в данный момент ПИ равный нулю; 9 - сигнал равный единице
191
Рис. 136. Принципиальная оптическая схема дальномерного блока электронного тахеометра 4Та5:
1 - лазерный диод; 2 - |
шторка; 3 - ромб-призма; 4 - световод; 5 - ПИ; |
|
6, 18 - призмы АР-90°; 7,8 |
- микрообъективы; 9,11 - зеркала; 10 - коллектив; |
|
12 - |
объектив; 13 - куб-призма; 14 - фокусирующий компонент; |
|
15 |
- оборачивающая система; 16 - сетка нитей; 17 - окуляр; |
|
|
19 |
- призма; 20 - аттенюатор |
Объектив 12, фокусирующая линза 14, оборачивающая система 15, сетка нитей 16 и окуляр 17 составляют зрительную трубу электронного тахеометра.
В электронном тахеометре 4Та5РМ используется датчик угла наклона прибора ПН-4 маятникового типа, внутри датчика находится электролизная жидкость, давление которой регулируется мембраной.
Структура погрешности преобразования тахеометров
В настоящее время известны два направления создания электронных тахеометров [69]: оснащение серийно выпускаемых кодовых теодолитов светодальномерным блоком (тахеометр на базе цифрового теодолита "Вектрон" и светодальномера "Авторейнжер" (США)), разработка приборов, в которых угломерная и дальномерная системы конструктивно совмещены, а вычислительное устройство расположено внутри прибора (тахеометры фирм "Leica", "Trimble", "АГА" и др.).
192
Погрешность измерения расстояний тахеометрами составляет 5 мм и более, погрешность измерения углов превышает 5
Исследованию точности преобразования посвящена многочисленная литература [18, 57, 25, 68, 72, 59, 6, 56, 80]. Однако структура погрешности преобразования современных электронных тахеометров до конца не изучена.
На рис. 137 и 138 приведена примерная схема факторов, влияющих на погрешность преобразования [18].
|
Структура погрешности преобразования |
|||
Методические погрешности У-м |
Погрешности прибора |
|||
Интерполяции |
Основные |
L |
Дополнительные |
|
|
||||
Линеаризации |
|
|
L |
|
характеристик |
Внешние факторы |
Внутренние факторы |
||
нелинейных |
||||
|
|
|
||
датчиков |
|
|
|
|
Квантование |
Температура |
^ |
Флуктуации оси излу- |
|
|
|
чения лазера по углу |
||
сигнала |
|
|
||
|
|
|
||
Аппроксима- |
Давление |
|
Разъюстировка лазе- |
|
|
|
ра (изменение длины |
||
ция функцио- |
|
|
||
|
|
волны излучения) |
||
нальных зави- |
Влажность |
|
||
|
|
|||
симостей |
|
|
||
|
|
|
||
Отличие функ- |
Фоновая |
|
Старение элементов |
|
|
|
|||
ции пропуска- |
засветка |
|
|
|
ния от синусо- |
|
|
Непостоянство нагруз- |
|
идальной (за- |
|
|
ки (нагрев, дрейф ну- |
|
висит от вида |
Вибрации |
|
ля усилителей посто- |
|
сопряжения |
|
янного тока) |
||
|
|
|||
между решет- |
|
|
|
|
ками) |
|
|
|
|
|
Электрические |
|
Несимметричность пи- |
|
Нарушение |
и магнитные |
|
||
поля |
|
тающих сигналов |
||
принципа Аббе |
|
|
|
|
Колебание частоты напряжения питания
Рис. 137. Структура погрешности преобразования современных электронных тахеометров
193
Рис. 138. Схема основных погрешностей преобразования современных электронных тахеометров
Перспективные направления по увеличению точности преобразования угловых перемещений
Гармонический анализ погрешности преобразования показал [18], что монотонного убывания амплитуд гармоник с ростом номера гармоники в растровых преобразователях на хромированных решетках не наблюдается, что не позволяет
194
повысить точность преобразования за счет исключения из спектра отдельных гармоник. Одним из путей повышения точности растровых преобразователей является использование в них дифракционных голографических решеток (ДГР) с периодом, соизмеримым с длиной волны когерентного источника излучения. При этом в плоскости ПИ анализируются интерференционные полосы. При линейной записи ДГР на выходе первичного преобразователя наблюдаются только гармоники нулевого и +1-го порядков, поэтому измерительные сигналы sin Uj и cos Uj (см. рис. 122) имеют синусоидальную форму но, 55].
Известны три схемы построения первичных преобразователей с голографическими решетками, показанные на рис. 139-141.
Рис. 139. Схема первичного преобразователя с одной ДГР:
1 - лазер; 2 - линза; 3 - измерительная ДГР; 4 - зеркала; 5 - четыре ПИ
В первой схеме (см. рис. 139) свет от когерентного ИИ 1, коллимированный линзой 2, попадает на измерительную решетку 3. Лучи, дифрагировавшие в +1-й порядок дифракции и нулевого порядка, отражаются от зеркал 4 и, проходя повторно решетку 3, попадают на ПИ 5. Преимуществом данной схемы является использование одной решетки. Однако при этом необходимо использовать ИИ с большой длиной когерентности (вызвано дисперсией и неравенством хода лучей в плечах между решеткой и зеркалами). Кроме того, наличие двух зеркал определенным образом затрудняет процесс юстировки преобразователя, увеличивает габариты.
Во второй схеме (см. рис. 140) используют две ДГР. Индикаторная решетка 3 вместе с ИИ 1 образует опорное плечо интерферометра, ПИ 5 расположены в дальней зоне Фраунгофера [42]. В плоскости ПИ, расположенных перпендикуляр-
195
I
Рис. 140. Схема первичного преобразователя с ДГР и большим двугранным углом (р2 между решетками:
1 - лазер; 2 - конденсор; 3 - индикаторная ДГР; 4 - измерительная ДГР; 5 - четыре ПИ
но биссектрисе угла между дифрагировавшими пучками, анализируются узкие интерференционные полосы.
Преимуществом схемы является более высокий, чем в предыдущей схеме, контраст интерференционных полос. Использование матричного ПИ для анализа узких интерференционных полос уменьшает шумы электронного тракта. Однако данная схема чувствительна к изменению угла между решетками, разность хода лучей до ПИ может меняться из-за отклонений температуры, что приводит к дополнительной погрешности измерения.
Кроме того, габариты преобразователя значительно увеличиваются.
Рис. 141. Схема первичного преобразователя с параллельными ДГР:
1 - лазер; 2 - конденсор; 3 - |
зеркало; 4 - индикаторная ДГР; |
5 - измерительная ДГР; 6 - |
четыре ПИ; 7 - предусилитель |
196
В настоящее время бблыиее распространение получила принципиальная схема первичного преобразователя с двумя параллельными ДГР (см. рис. 141) [92]. В ней коллимированный линзой 2 световой поток от ИИ 1, отражаясь от зеркала
е0
3, падает под углом Брэгга, равным — (90 - угол интерферометра при записи решеток), на индикаторную ДГР 4, затем на измерительную ДГР 5. В результате дифракции на решетках в направлении +1-го порядка дифракции происходит восстановление пучков света, подобных тем, что использовались при записи решеток. При этом в интерференционном поле дифрагировавших на ДГР волн образуется система равноотстоящих изофазных плоскостей (в произвольном сечении, например в плоскости ПИ 6, интерференционных полос). Принципиальная схема имеет два конструктивных решения, относящихся к перемещению измерительной решетки 5 относительно индикаторной решетки 4: индикаторная решетка 4 неподвижно связана с корпусом, в котором перемещается подвижная измерительная решетка 5, индикаторная решетка 4 базируется непосредственно по измерительной решетке 5 и перемещается по ней. Здесь угол между решетками может быть выбран близким к нулю, при этом в плоскости ПИ формируются бесконечно широкие интерференционные полосы. Реверсивный счет полос при их перемещении осуществляется за счет пространственного сдвига участков индикаторной решетки, сопряженных с соответствующими ПИ.
При использовании индикаторной решетки без пространственного сдвига участков изменением двугранного угла между решетками добиваются равенства полуширины интерференционной полосы размеру чувствительной площадки ПИ, расположенного рядом с измерительной решеткой. Две пары ПИ, включенных встречно, следят за изменением постоянной составляющей квадратурных сигналов, вызванным изменением дифракционной эффективности измерительной решетки в диапазоне измерения. В данной схеме может использоваться квазимонохроматический ИИ (полупроводниковый лазер). Преобразователь имеет наименьшие габариты по сравнению с описанными выше преобразователями с ДГР.
197
Крепление измерительного растра традиционно осуществляется планками. Однако некоторые фирмы крепят его с помощью эпоксидной смолы. Эти методы не выдерживают ухудшенных условий эксплуатации, поэтому в последние годы для крепления измерительного растра стали применять кремнийорганические герметики, при этом процесс закрепления осуществляется на инструментальном микроскопе.
Кроме совершенствования принципиальных схем преобразователей перемещений угол-код, наблюдается совершенствование конструкции осевых систем прибора, поддерживающих стабильное положение преобразователя в пространстве.
Заслуживает внимания вертикальная осевая система, изобретенная А. Юнтом, X. Лейтцем, Э. Лепнером и Г. Рометшом (рис. 142).
В данной конструкции корпус 2 и цилиндрическая ось 3 изготовлены из одной заготовки, между ними находится сепаратор 4 из большого количества шариков 5, смещенных один относительно другого по винтовой линии и равномерно распределенных по всей поверхности сепаратора. Шарики в точках касания претерпевают упругую деформацию (зазор между осью и втулкой примерно на 3 мкм меньше, чем диаметр
Рис. 142. Осевая система электронного тахеометра:
1 - измерительный растр; 2 - втулка (корпус); 3 - цилиндрическая ось; 4 - сепаратор; 5 - шарик; 6 - упорный подшипник
198
шарика). В осевом направлении цилиндрическая ось удерживается двумя упорными подшипниками 6.
По сравнению с другими осевыми системами показанная на рис. 142 конструкция нечувствительна к изменениям температуры, значительно дешевле (в ней используются стандартные шарики нулевого класса вместо шариков второго класса точности). Кроме того, данная осевая система практически не подвержена износу, нечувствительна к изменению вязкости смазки и динамическим воздействиям (ударам).
В Приложении 2 приведена перспективная методика проверки и аттестации фотоэлектрических круговых преобразователей перемещений [58], которая, в принципе, может быть использована и для исследований электронных тахеометров. В МИИГАиКе разрабатывается устройство для аттестации углоизмерительных систем электронных тахеометров, в котором заложены принципы искусственных нейросетей, позволяющих системе самообучаться путем введения соответствующих весовых коэффициентов, полученных при аттестации прибора.
Ниже приведены методики работы с некоторыми, хорошо себя зарекомендовавшими, электронными тахеометрами.
Методика работы на станции электронным тахеометром ТС600Е производства ФГУП "УОМЗ" (Россия)
Работу с электронным тахеометром ТС600Е можно выполнить, кодируя координируемые точки. Однако это занимает больше времени на измерение и внутреннюю память прибора. Поэтому в настоящее время работу ведут в основном с рисовкой абриса, присваивая номера соответствующим пунктам хода или пикетам. В работе участвуют два исполнителя: один работает у прибора, другой по абрису обходит с отражателем координируемые точки участка съемки. В момент измерений отражатель направлен в сторону прибора.
Центрирование и горизонтирование прибора
Предварительно центрирование прибора осуществляют известными методами с помощью оптического центрира и круглого уровня, расположенного на алидаде, затем горизонтируют прибор по электронному уровню.
199
Включение прибора осуществляют кнопкой "ON", при этом на экране дисплея, как правило, высвечивается меню, которое использовали в предыдущей работе, например, как на рис. 143. Окончательно прибор горизонтируется по двухкоординатному электронному уровню.
'ALL |
' DIST |
REC MENU fG= 1 г |
СЕ |
> Г ON л |
. \ 7 |
- |
CONT |
CODE |
OFF |
|
|
|
Рис. 143. Меню дисплея при включении прибора
Для этого необходимо войти в "MENU", на экране дисплея высвечивается режим горизонтирования прибора (рис. 144,а). Кнопками "v" и "А" установить курсор напротив "LEVEL" (уровень) и кнопкой 6tc>" войти в режим электронного уровня, на экране появится изображение уровня (рис. 144, б), окончательно горизонтируя прибор, установить правильное показание курсоров (рис. 144,в). Проверить центрировку прибора.
\г |
MENU ч |
|
|
|
SET |
|
|
|
LEVEL |
|
|
|
PROG |
I I I X I |
|
^ |
TEST |
|
|
а |
J |
в |
|
|
б |
||
Рис. 144. Изображение на экране дисплея для горизонтирования прибора
Тестирование и выявление погрешностей прибора
Для тестирования прибора клавишей v опустить курсор (рис. 144,а) до появления функции "TEST" и войти в режим тестирования, на экране дисплея при этом появится сообщение о напряжении питания и температуре прибора (рис. 145,а), напряжение питания прибора при полностью заряженном аккумуляторе равно 9 вольт.
200
MENU *TEST
BATTERY |
9 |
TEMP °C |
21 |
— • SIGNAL |
/ |
V |
|
а |
б |
Рис. 145. Изображение на экране дисплея в режиме тестирования
При затрудненной видимости (например, в тумане) наводящими винтами необходимо установить максимальное значение сигнала, войдя в подменю "SIGNAL" (рис. 145,6).
При горизонтальной визирной оси зрительной трубы отсчет по вертикальному кругу должен быть равен месту зенита MZ = 90°. Погрешность места зенита исследуют при перепадах температуры более 10 °С, после длительного хранения или транспортировки и заносят в память. Для этого необходимо войти в подменю "CALIB" (рис. 146,а), установить стрелку напротив подменю "V-INDEX" (рис. 146,6) и войти в него (рис. 146,в).
f |
MENU |
\ |
MENU'CALIB |
ГCALIB*V-INDEX: |
||
|
UTILITIES |
|
V-INDEX |
|
I |
0.000 |
|
TEST |
|
Hz - COLLIM |
|
Inew: |
|
V* |
CALIB |
J |
|
\ |
>Measure index< |
|
|
а |
|
б |
|
|
в |
\ f CALIB*V-INDEX: \
I : 0.000
Inew :
J V> Set Value? < J
г
Рис. 146. Изображение на экране дисплея при исследовании места зенита
На дисплее высвечивается I - текущее значение, новое значение "inew" появится после переопределения места зенита. Для выявления нового значения необходимо подтвердить измерения нажатием клавиши "CONT". При этом на дисплее будут появляться подсказки:
>Aim Point < - визировать на марку при круге "лево", клавиатура на себя,
>Wait < - ждите,
>Anothe Face < - визировать на марку при круге "право", клавиатура от себя,
>Set Value? < (ввести новое значение?) (рис. 146,г).
Для введения в память нового значения необходимо нажать клавишу "CONT", для оставления прежнего значения
201
нажать клавишу "STOP". Вернуться в меню "CALIB" через клавишу "СЕ".
При исследовании коллимационной погрешности необходимо в меню "CALIB" опустить индекс-стрелку напротив "Hzcollim" (см. рис. 146,6) и войти в подменю, появится экран дисплея, показанный на рис. 147, а. Дальнейшие действия аналогичны исследованиям MZ (рис. 147,6).
/-CALIB*Hz-Collim \ С 0.000 Inew
>Measure
Ч __ У
а
CALIB*Hz-Collim С 0.000 Inew
> Set Value? <
б
Рис. 147. Изображение на экране дисплея при исследовании коллимационной погрешности
При исследовании коллимационной погрешности марку выбирают далеко, но на уровне горизонта.
Установка исходных данных
В зависимости от выполняемых задач в режиме MENU*SET*DSP выбирают одну из трех масок дисплея (рис. 148).
PtNr |
:+00000001 |
PtNr |
+0.0000001 |
Hz |
341°17'23ч |
Е |
|
|
78°45te2? |
N |
|
|
: 153.865 |
Н |
|
Рис. 148. Маски дисплея
Для записи в память полученных в результате измерений данных необходимо предварительно установить соответствующую маску, задав формат данных во внутренней памяти прибора. Для этого необходимо войти в меню "CONF*REC" (см. рис. 149,а,б,в) и установить соответствующую маску. При выборе "MASK 1" в память прибора будут записаны: номер пикета (PtNr), отсчет по горизонтальному кругу (Hz), от-
202
счет по вертикальному кругу (V), наклонное расстояние (D), поправки (ppm/mm), высота прибора (hj) и высота отражателя (hr). При выборе "MASK 2" в память прибора будут записаны: PtNr, Hz, V, D, координаты Y (Е), X (N), высота (Н) и h r
г |
|
\ |
r |
\ |
|
MENITCONF |
|
|
CONF*REC |
|
PARAMETER |
|
|
PORT > RAM |
|
INTERFACE |
|
|
••MASK>MASK1 |
v > |
REC |
J |
\ |
J |
а |
б |
|
|
в |
Рис. 149. Вход в меню "CONF* REC"
Постоянную поправку в мм вводят в меню SET*SET*ppm/ mm, при этом для отражателей фирмы "Leica" она равна нулю, для отражателей ПО "УОМЗ" - 10 мм со знаком "-", значение поправки р р т берут по номограмме в зависимости от температуры и давления.
|
MENU'SET |
|
SET'SET PtNr/hr |
|
|
SET PtNr/hf |
|
PtNr |
: +00000001 |
|
Hz |
|
||
^ |
DSP |
у |
hr |
: 1.525 |
а |
|
б |
||
|
|
|
||
|
Рис. 150. Подменю |
"SET" |
||
Ввод начального номера пикета (при измерениях номер автоматически увеличивается на единицу) выполняют в подменю "SET" (рис. 150).
Для выбора единиц измерения необходимо войти в MENU*CONF*UNITS, при этом на дисплее появится сообщение, показанное на рис. 151,а. Для выбора единиц для измерения расстояний необходимо нажать клавишу "REC" и выбрать единицы: m - метры, ft - футы. Для выбора единиц измерения углов необходимо опустить курсор (рис. 151,6), нажать "REC" и выбрать:
gon = 400 гон, 360S = 359°59'59" или 360d = 359.999 (десятые доли).
203
CONPUNITS |
CONF*UNITS |
|
-*DIST > m |
DIST |
> m |
ANGLE>360S |
• ANGLE |
>360S |
DSP ACC> low |
DSP ACC > low |
|
CONF*UNITS DIST > m ANGLE > 360S „ DSP ACC > low
а |
б |
в |
Рис. 151. Вход в меню "CONF+UNITS"
Ориентирование прибора на опорное направление
Ориентирование прибора выполняется двумя методами (см. рис. 152): опускают стрелку на уровень Hz (см. рис. 150,а), входят в подменю Hz (рис. 152,а), нажимают клавишу "CONT" и визируют на исходную марку, клавишей "CONT" подтверждают выбранный начальный отсчет по горизонтальному кругу (рис. 152,6), после чего возвращаются к дисплею измерений; после входа в подменю Hz поворачивают прибор до требуемого исходного дирекционного угла, клавишей "CONT" "замораживают" его значение на экране, ориентируют зрительную трубу на исходное направление и подтверждают его снова клавишей "CONT" (см. рис. 152,в).
SET*Hz
Hz : 0°00;00"
V^ : 25°34'56
Cont to hold
SET*Hz
Hz : 0°00'00"
V : 25°34'56"
Cont to release
SET*Hz
Hz : 34°27'15"
V : 25°34'56"
Cont to hold
Рис. 152. Маски экрана дисплея при ориентировании прибора
Нумерацию пунктов хода необходимо отличать от номеров пикетов, например, специальными символами или по номеру бригады.
Съемка пикетов
Перед съемкой пикетов как правило рисуют абрис участка съемки, номер пикета на абрисе должен совпадать с номером пикета на дисплее, отражатель во избежание сбоев в нумерации пикетов направляют в сторону прибора только во время
204
отсчитывания или по команде реечника, например, рукой "вверх". После отсчитывания очередного пикета наблюдатель делает отмашку о переходе на другую точку. Результат измерений подтверждают нажатием клавиши "DIST" (при этом данные измерения выводятся только на дисплей) или клавиши "ALL" (при этом данные измерения заносятся в память микропроцессора). После выполнения работ на станции желательно проверить ориентировку прибора на начальное направление. При съемке участка одновременно с проложением хода перед съемкой вынести следующую точку хода или связующие точки.
Просмотр полученных результатов измерений
Для просмотра полученных результатов измерений необходимо войти в MENU*UTILITES*VIEW и опустить курсор до уровня OBSERV - для просмотра данных измерений по блокам, до уровня COORDS - для просмотра координат пикетов или пунктов хода, до уровня CODES - для просмотра дополнительных кодов.
Удаление данных измерений
Удаление результатов измерений выполняют в MENU*UTILITES* DELETE, при этом курсор устанавливают напротив опции "OBSERV" - для стирания из области блоков измерений, напротив опции "COORDS" - для стирания из области блоков координат, напротив опции "CODES" - для стирания кодов.
Все подтверждения команд выполняются нажатием клавиши "CONT", выход из субпрограмм выполняют нажатием клавиши "CE/CODE".
Методика работы на станции электронным тахеометром Elta R фирмы "Trimble - ZEISS" (США - Германия)
Электронный тахеометр Elta R (рис. 153, 154) пользуется в настоящее время большой популярностью из-за простоты обращения с ним, кроме того, его подставка - трегер взаимозаменяема с теодолитами типа ЗТ2КП и ЗТ5КП, что позволяет
205

Рис. 153. Электронный тахеометр Elta R:
1 - зрительная труба;
2 - экран дисплея; 3 - клавиатура;
4 - подставка
Fi F2 F3 F4 F5
Рис. 154. Дисплей и клавиатура электронного тахеометра
выполнять измерения по трехштативной методике.
Прибор имеет одноосевой компенсатор при вертикальном круге - диапазон работы компенсатора ±2' 40", погрешность измерения угла - 5", расстояний - 5 мм + 3 мм/км, увеличение зрительной трубы 26х, в дальномерном блоке использован фазовый метод с модулированием излучения лазера.
Включают прибор клавишей
"ON", выключают |
одновремен- |
|
ным нажатием |
" O N + O F F " . |
|
После включения прибора |
для |
|
привязки нулевых отсчетов |
по |
|
кругам выполняют их инициализацию, поворачивая один раз зрительную трубу вокруг оси вращения, затем алидаду вокруг вертикальной оси.
Меню измерений состоит из двух страниц (рис. 155), переход с одной страницы на другую происходит после нажатия функциональной клавиши "F5 ". Первая страница содержит:
1) информацию о режимах измерений: Hz V - отсчеты по горизонтальному и вертикальному кругам, H D - горизонтальное проложение и превышение, YXH - координаты в прямоугольной системе координат, SD - наклонное расстояние. Для смены режимов работы на первой странице меню необходимо нажать клавишу Fjj
206
2)клавишу "Hz=0" (S2), служащую для обнуления отсчета по горизонтальному кругу. После нажатия на нее появится просьба о наведении на визируемую цель, после наведения необходимо нажать клавишу "MEAS" и ESC (Fj);
3)функциональную клавишу "ДЕРЖ", с помощью которой выполняют ориентацию горизонтального круга. После нажатия клавиши "ДЕРЖ" необходимо повернуть алидаду до нужного значения дирекционного угла, нажать клавишу "MEAS", затем визировать зрительную трубу на цель и снова нажать клавишу "MEAS". Операцию завершить, нажав клавишу Fj (ESC);
4)клавишу "th/ih", используемую для ввода значений высоты отражателя ("th") и высоты прибора ("ih"), а также отметки пункта стояния ("Zs").
Вторая страница меню измерений (см. рис. 155,6) служит для установки единиц измерения расстояний (клавиша "Fj"),
установки единиц измерения углов (клавиша "F2"), переключения между режимами измерений горизонтальных углов по
ипротив хода часовой стрелки (клавиша "F3 ") и проверки работы компенсатора, коллимационной погрешности и места зенита. Выход из подменю осуществляется клавишей "Fx".
|
HD |
0.000 m |
k |
K + |
M E M / 1 |
|
|
||
I ^ . H z |
54.7936° |
|
|
||||||
К |
столб |
|
K + |
||||||
ZW |
Н |
|
0.000 m |
|
|
T |
127001 |
|
|
Xyh |
Hz=0 |
th/ih Держ |
- • 2 |
m |
DMS « - H z KOHT - * 1 |
||||
Fi |
|
F2 |
F3 |
F4 |
F5 |
|
r3 |
r4 |
r5 |
Рис. 155. Меню измерений:
первая (а) и вторая (б) страницы
Измерения выполняют, нажимая клавишу "MEAS" . Исследование поправок за коллимационную погрешность
и место зенита выполняют, нажав клавишу "КОНТ", при этом на экране появится меню, показанное на рис. 156 . Клавишу "F4 " используют для включения / выключения компенсатора; клавишу "F3 " используют для выявления погрешности компенсации; клавишу "F2 " используют для выявления указанных выше поправок, при этом на экране дисплея сначала по-
207
+IN * |
\ |
IN |
|
|
|
ESC С/1 |
Комп |
С - Не |
Рис. 156. Меню дисплея
явятся текущие значения поправок. Измерения начинают выполнять при положении вертикального круга "право', нажимая клавишу "MEAS" Для просмотра результатов измерений необходимо нажать функциональную клавишу "ON" вместе с клавишей "EDIT" ("ON+EDIT"), на дисплее появится сообщение, показанное на рис. 157,а; нажать клавишу "Отс", появится сообщение, показанное на рис. 157,6 с адресом, кодом и номером точки. Результаты измерения данной точки (например, 0743) просматривают на второй странице меню через клавишу л . Удаление результатов измерений осуществляют через клавишу "Выч" (F3).
Память своб. 1150 |
|
А |
0744 (строка данн) |
so |
251.457 m |
|
Послед, адрес 743 |
^ |
К |
АВСД ( код точки ) |
Hz |
121.0644° |
|
|
|
T |
127 (№ точки ) |
U1 |
89.7200° |
|
ESC Отс Выч Inp |
|
ESC t |
1 ? |
ESC |
"7 |
|
|
|
|||||
|
|
|
|
|
||
а |
|
|
|
б |
|
в |
Рис. 157. Сообщения на экране дисплея |
|
|||||
Возврат в |
исходное |
меню осуществляют |
клавишей |
|||
"ESC" (F{).
Методика работы на станции
электронным тахеометром "POWER SET2000 фирмы "SOKKIA" (Япония)
Включение тахеометра осуществляют нажатием клавиши "ON" (выключение: "ON + после чего по звуковому сигналу инициализируют вертикальный и горизонтальный
208
круги. Клавиатура тахеометра показана на рис. 158. Если при включении прибора на табло высвечивается "Memory is full" (память переполнена) или в процессе работы возникла системная ошибка, необходимо выполнить горячую перезагрузку: выключить прибор и, удерживая клавишу "ALPHA", снова включить его и инициализировать горизонтальный и вертикальный круги. При переполнении памяти удалить ненужные файлы в режиме "Job deletion".
OFF |
|
|
г |
|
|
|
|
|
ESC |
7 |
8 |
9 |
|
f r |
FNC |
SFT |
© © 4 |
© 5 |
©Q |
|
|
© © |
-j |
© 2 |
© о |
||
|
00 |
О о |
© |
j |
||
|
|
|
||||
ЭКРАН |
|
|
© |
|||
ДИСПЛЕЯ |
|
|
||||
|
|
|
||||
|
|
|
® © |
© © |
||
|
|
|
© © © |
©Meas |
||
[ F1 | [ F2 | [ F3 ] [ F4 ] I |
Enter |
© © © © |
||||
View Note |
|
Num |
||||
|
|
|
© © |
|
ALPHA |
|
Рис. 158. Клавиатура электронного тахеометра POWER SET2000
Электронный тахеометр POWER SET2000 может работать в режимах тахеометра и накопителя.
Режим тахеометра (см. рис. 159,а), к этому режиму прибор автоматически возвращается, если с момента последнего включения прошло более недели, иначе на дисплее будет выведена информация о последнем включении прибора. Переход в режим тахеометра осуществляют в любой момент од-
209
новременным нажатием клавиш "FNC+MEAS". На дисплее высвечивается:
Р.С. mm - поправка на отражатель, |
|
|
|
||||
р р т |
- атмосферная поправка, |
|
|
|
|||
H.obs - отсчет по горизонтальному кругу, |
|
|
|||||
V.obs - отсчет по вертикальному кругу, |
|
|
|||||
S.dist - наклонное |
расстояние, |
|
|
|
|||
I * - |
индикатор включения |
компенсатора, |
|
|
|||
I—13 - уровень зарядки акккумулятора (3 - |
100%, 2 - |
70%, |
|||||
1 - 30%). |
|
|
|
|
|
|
|
Р.С. |
mm |
|
- 30 |
0 4 - S e p t e m b e r 10:00:48 |
|||
ppm |
|
|
0 |
Job |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sth |
|
|
|
H.obs |
|
< Null > |
BS pt |
|
fi3 |
|
|
V.obs |
|
< Null > |
Free recs |
|
|||
S.dist |
|
< Null > |
1851 |
||||
|
|
|
|
|
|||
READ PPM CNFG REC |
FUNC |
SURV COGO ROAD |
|||||
F1 |
F2 |
F3 |
F4 |
F1 |
F2 |
F3 |
F4 |
|
|
а |
|
|
|
б |
|
Рис. 159. Изображение на экране дисплея в режиме тахеометра (а), в режиме накопителя (б)
Режим накопителя. В этом режиме используют функции полевого журнала. Переход в режим накопителя осуществляют функциональной клавишей "REC" (F4), "Enter", при этом на дисплее появится сообщение, показанное на рис. 159,6.
Методика работы в режиме накопителя
Создание нового файла работ
В этом файле будет находиться исходная информация и результаты измерений. В меню накопителя (см. рис. 159,6) выбирают меню "FUNC" (клавиша F1), из опции меню "FUNC" (рис. 160,а) выбирают опцию "Job " (выбор файла), подтверждая ее клавишей "Enter". Если в приборе нет файлов работ, то
210
на экран будет выведена информация (рис. 161,6). Если файлы уже есть, то сначала появится меню, показанное на рис. 161,а, его подтверждают клавишей "NEW" (новый).
Job |
Job deletion |
|
Feature code list |
||
|
||
Instrument |
Hardware |
|
Job settings |
Communications |
|
Configure reading |
Card menu |
|
Tolerances |
Language |
|
Units |
||
|
||
Date and time |
|
|
SURV COGO ROAD |
SURV COGO ROAD |
|
а |
б |
Рис. 160. Опции меню "FUNC"
Select job
Brush Creek
Desoto Plant
Olathe North
Lenexa Topo
Shawnee HS
NEW STAT CTRL PGDN
а
Create job |
|
|
Job |
< No text > |
|
S.F. |
1.00000000 |
|
Point Id Numeric < 4 > |
|
|
Record elev |
Yes |
|
Atmos cr n |
No |
• |
|
A |
|
б
Рис. 161. Информация на экране дисплея
В опции "Job" вводят имя нового файла (может быть до 16 символов) и подтверждают "Enter". Если выполняют только плановую съемку, то в опции "Record elev" выбирают параметр "No". Опция "Point Id Numeric" показывает, что точки имеют обозначения до 4 цифр. Для работы с уже существующим файлом в опции "Select job", пользуясь стрелками I или Т, необходимо выбрать необходимый файл и просмотреть его через "View".
Если теперь нажать клавишу "Enter", появится меню "Note"(KOMMeHTapnfl), снова "Enter" - работа станет текущей, при нажатии клавиши "Esc" произойдет возврат к меню выбора работ. Стрелками выбирают опцию "Configure reading", в появившемся окне задают номер начального пикета и вид
211
хранения информации (OBS - хранение исходных данных). Многократно нажимают клавишу "Esc" до появления меню, показанного на рис. 161,а.
Ориентирование прибора на станции
Для ориентирования, убедившись, что прибор находится в соответствующем режиме измерений, выбирают меню "Survey" (геодезическая съемка) и в нем опцию "Topography", "Enter" Если ранее не были заданы координаты станции стояния и точки ориентирования, то на экране дисплея высвечивается информация (рис. 162). Необходимо указать название станции в опции "Stn", пользуясь стрелками на панели прибора, задать ее координаты North (X), East (Y), Elev (H) и высоту прибора (Theo ht) (по стрелке можно перейти с поля "N" на поле "А" и дать необходимый код станции), ввести имя ориентирной точки (если она заранее задана) в поле "А" (рис. 163) и метод ориентирования по координатам или азимуту (рис. 164).
Stn |
0001 |
North |
1000.000 |
East |
1000.000 |
Elev |
100.000 |
Theo ht |
1547 |
Pressure |
760,0 |
Temperature |
20,00 i |
Рис. 162. Информация на экране дисплея при ориентировании прибора на станции
Confirm orientation |
Key in coords |
Stn |
Key in azimuth |
BS pt |
|
N |
BS azimuth not found |
Рис. 163. Введение имени |
Рис. 164. Введение сведений |
ориентирной точки в поле "А: |
о методе ориентирования |
212
При выборе метода ориентирования по координатам на табло дисплея появится предложение о вводе номера точки ориентирования и ее координат (рис. 165,а). При ориентировании по дирекционному углу - следующая информация (рис. 165,6).
Pt = 0002 - точка ориентирования, From = 0001 - номер станции стояния.
Key in coords |
Key in azimuth |
||
Pt |
0002 |
Cd |
BS |
North |
2000.000 |
To pt |
0002 |
East |
2000.000 |
From |
0001 |
Elev |
150.000 |
Azimuth |
0°00, 00" |
Cd |
BS |
|
A |
|
N |
|
|
|
а |
|
б |
Рис. 165. Информация на экране дисплея при выборе метода ориентирования
Для сохранения ориентирования в базе данных следует нажать "Enter". После ввода данных по ориентированию появится меню, показанное на рис. 160,а.
Для выполнения измерения необходимо визировать зрительную трубу на ориентирную точку и нажать клавишу "READ" или клавишу "ANGLE", тахеометр начнет измерения и на экране появится сообщение, показанное на рис. 166,6. Ввести высоту отражателя "Target ht", сохранить результаты ориентирования, нажав клавишу "Enter".
Take BS reading |
Code |
|
||
Stn |
0001 |
|
< No text > |
|
BS pt |
0002 |
Pt |
0002 |
|
H.obs |
< Null > |
Target ht |
< Null > |
|
V.obs |
< Null > |
H.obs |
< Null > |
|
< Null > |
||||
S.dist |
< Null > |
V.obs |
||
S.dist |
< Null > |
|||
1 READ |
OFS ANGLE CNFG |
1 READ OFS |
ANGLE CNFG |
|
Рис. 166. Меню на экране дисплея
Теперь прибор готов к выполнению съемки и каждый раз выдает на экране дисплея следующую информацию (рис. 167).
213
Stn |
Take reading |
0001 |
|
Pt |
129 |
Торо |
< Null > |
H.obs |
|
V.obs |
< Null > |
S.dist |
< Null > |
1 READ DFS ANGLE CNFG
Рис. 167. Сообщение на экране дисплея о готовности прибора к съемке
Дальнейшие измерения выполняют нажатием клавиши "READ", клавишу "Enter" нажимают только для последнего пикета на станции.
Просмотр полученных результатов измерений
Просмотреть результаты измерений можно в любой момент, нажав клавишу "View" (рис. 168,а). Программная клавиша "SRCH" позволяет осуществить поиск в базе данных по имени точки или ее коду. При нажатии клавиши "SRCH" на экране появляется изображение (рис. 168,6). После чего в поле "Pt" необходимо ввести имя точки, нажать "Enter" или "PREV" - для поиска назад ("NEXT" - для поиска вперед). Теперь можно открыть запись для просмотра.
Atmos |
TP а |
Pt |
I |
I |
RED |
10011 |
Code |
No text |
|
Target ht |
1.600 |
|
||
F1 |
1000 |
|
|
|
Note 05-Mar-97 |
11:42 |
|
|
|
F1 |
1001 |
|
|
|
Stn |
0101 |
|
|
|
SRCH | SHFT | PREV |
| NEXT |
PREV |
NEXT |
N |
a |
|
|
б |
|
Рис. 168. Просмотр полученных результатов измерений
Просмотр данных можно также выполнить после перехода к опции "Topography", опустив курсор на уровень "Set review" и войдя в него.
214
Удаление результатов измерений
Для удаления файлов работ используют опцию "Job deletion" (см. рис. 160,6). После выбора опции на экране появится информация (рис. 169,а).
Select jobs |
Shawnee |
Yes |
Select roads |
Desoto Plant |
N/A |
Select templates |
Olathe North |
No |
Select all data |
Бригада№127 |
Yes |
|
||
|
ALL |
|
a
Рис. 169. Изображение на экране дисплея при удалении файлов
Подсветить "Select gods" (выбор работ), "Enter", после чего появится меню со списком работ (рис. 169,6), при этом работы, которые можно удалить, отмечены как "No". Для удаления выбранной работы необходимо подсветить ее, стрелками "->" , переключить "No" на "Yes" и нажать "Enter". Файл
будет удален.
Передача результатов измерений в компьютер
Для передачи результатов измерений с накопителя электронного тахеометра POWER SET2000 в компьютер используют, например, прилагаемую к прибору программу "ProLINK Version 1.15".
Для этого необходимо при выключенных приборе и компьютере соединить кабель с прибором и последовательным портом СОМ1 (или COM2) компьютера. После загрузки компьютера включить электронный тахеометр.
Далее порядок действий следующий:
1.Пуск программы Sokkia "ProLINK Version 1.15, на экране монитора появляется окно "ProLINK",
2.Установить курсор на "File", затем "New Project", на экране появится папка "Data" - назвать имя файла (например, номер бригады 136), курсором сохранить набранное имя, после чего появляется окно с формой журнала "Field Book Editor",
215
3.Установить курсор на "File", войти в подменю "Send Ressive", появится окно "Download/Upload" - в левом окне выбрать тип файла (например, "All Files (*.*)), в правом окне установить "POWERSET Memory",
4.Установить курсор на "Setting" и согласовать номер последовательного порта передачи (СОМ1 или COM2) и скорость передачи данных (например, 9600) - нажать "ОК",
5.Курсором войти в "Connect", в правом окне дать имя файла (например, 136.SDR) и выделить его,
6.Установить курсор на "< -", нажать левую кнопку мыши,
впоявившемся окне войти в "Overwrite", после чего на мониторе появится сообщение "Send the file...Waiting to receive" - компьютер готов к приему результатов измерений,
7.На электронном тахеометре войти в режим "FUNC",
стрелкой - <-> X опустить курсор до опции "Communications"
иклавишей "Enter" войти в нее, на экране дисплея появится окно (рис. 170,а), клавишей "СОМ" войти в окно (рис. 170,6)
ипроверить установки для передачи (СОМ и скорость передачи должны быть согласованы с соответствующими установками на компьютере, остальные параметры оставить без изменения),
Communicatic>ns |
Device |
COM |
|
|
|
Baud rate |
9600 |
Data Format |
SDR |
Word length |
8 |
|
|
Parity |
Not set |
|
|
Stop bit |
1 |
Optns com |
send recv |
Output delay |
0 |
|
|
File |
No |
|
а |
|
б |
Рис. 170. Окна на экране дисплея
8.Клавишей "Enter" подтвердить выбранные установки,
вокне (рис. 170,6) нажать клавишу "SEND" (F3), на дисплее появится окно (рис. 171), стрелкой 1Ч<-> опустить курсор до выбранного файла (например, 136), стрелкой —> установить вместо "No" параметр "Yes",
9.После нажатия клавиши "Enter" происходит передача указанного файла "136" в компьютер, после звукового сигнала на клавиатуре компьютера нажать любую клавишу.
216
Send records in
133No
134No
135No
136Yes
Рис. 171. Передача файла под номером 136 в компьютер
Для чтения переданного файла в полевом журнале установить курсор на "File", выбрать подменю "Import", нажать "ОК", в появившемся окне "Data" назвать имя файла "136.SDR" и открыть его. На экране появится полевой журнал, на первой странице которого указаны начальные установки, сделанные при съемке в поле (координаты станции, азимут опорного направления и т.д.), на второй странице - результаты съемки (например, № пикета (точки хода), координаты пикетов X,Y,H).
Распечатку полевого журнала осуществляют через "File —> Print", затем через "Exit" выходят и программы "ProLINK".
Исследование места нуля компенсатора, коллимационной погрешности в горизонтальной плоскости и места зенита в вертикальной плоскости
При исследованиях сначала выявляют место нуля компенсатора. При этом выбирают опцию "Tilt offset" из меню "Surv", появится экран, показанный на рис. 172, а, визируют на точку при круге "лево" и нажимают "READ", на экране
X |
Tilt offset |
1600 |
Tilt offset |
|
tilt offset |
X tilt offset |
1600 |
||
Y |
tilt offset |
1600 |
Y tilt offset |
1600 |
|
Face 1 |
|
Face 2 |
|
H.obs |
< Null > |
H.obs |
< Null > |
|
X tilt |
< Null > |
X tilt |
< Null > |
|
Y tilt |
< Null > |
Y tilt |
< Null > |
|
|
READ |
|
READ |
|
|
а |
|
б |
|
Рис. 172. Сообщение на экране дисплея при исследовании места нуля
217
дисплея появится сообщение, показанное на рис. 172,6. Визируют на ту же точку при круге "право", нажимают "READ", на экране появится сообщение, показанное на рис. 173, а.
Tilt offset |
1600 |
Discard |
data |
X tilt offset |
|
|
|
Y tilt offset |
1600 |
Confirm? |
|
New tilt offset |
|
|
|
0 |
|
|
|
X tilt |
|
|
|
Y tilt |
0 |
YES |
NO |
|
|
||
READ |
|
|
|
а |
|
|
б |
Рис. 173. Сообщение на экране дисплея
Для сохранения нового значения места нуля компенсатора необходимо нажать клавиши "Enter", затем "YES". После этого при всех измерениях при включенном режиме компенсатора будет применяться соответствующая поправка. На рис. 159,а режим при включенном компенсаторе показан значком "*". Для включения (выключения) компенсатора необходимо войти в опцию "CNFG" (конфигурация), стрелкой I опустить курсор до "Tilt crn" - включить компенсатор стрелкой —установив "Yes" (выключить - "No"). Для тахеометра POWERSET2()oo № D20855 место зенита вычисляют по формуле:
М = 360-Л-П |
360° - 89° 19'40"-270°40'05" = 8*. |
(91) |
При исследовании коллимационной погрешности необходимо выбрать опцию "Collimation" в меню "Survey" . После чего необходимо задать станцию стояния и выполнить ориентирование прибора, как это было описано на стр. 212.
После нажатия клавиши "Enter" на экране появится изображение (рис. 173,а). Указать название ориентирной точки, визировать при круге "лево" (отсчет по вертикальному кругу от 0° до 180°), после нажатия клавиши "READ" прибор предложит визировать на ту же точку при круге "право" (см. рис. 174,6). Клавишей "READ" подтвердить измерение.
218
|
Take reading |
Sth |
Take F2 |
|
Sth |
0001 |
|||
|
||||
0001 |
|
|||
|
Coilimation |
|||
Coilimation |
||||
H.obs |
< Null > |
|||
H.obs |
< Null > |
|||
V.obs |
< Null > |
|||
V.obs |
< Null > |
|||
Angle - |
only |
|||
Angle - |
only |
|||
|
|
|||
1 ^EAD| ANGLE |CNFG |
1 |READ| |
ANGLE I CNFG |
||
|
а |
|
б |
|
Рис. 174. Изображение на экране дисплея при исследовании коллимационной погрешности
Для просмотра полученных результатов необходимо нажать клавишу "Enter", при этом появится окно, показанное на рис. 175, а. Для сохранения результатов измерений в базе данных прибора еще раз нажать клавишу "Enter" (или "Yes") (рис. 175,6). Для тахеометра POWER SET2000 № D20855:
с_Л-П-т° |
_ 354°3912М74о39Ю4"-180° |
||
2 |
|
2 |
|
Coilimation |
|
Diskard data |
|
CL |
0°00,00" |
Confirm? |
|
H.obs |
H |
||
V.obs |
0°00'00" |
Yes |
|
а |
|
|
б |
Рис. 175. Изображение окна
Подробные инструкции для пользователя, как правило, поставляют вместе с электронным тахеометром.
Методика работы на станции электронным тахеометром TCR 305 фирмы "Leica"
Электронный тахеометр TCR 305 может работать в двух режимах: с отражателем (IR), без отражателя (RL). Режим работы высвечивается на экране дисплея.
219

Установка режима IR или RL
Соответствующий режим можно установить, например, через меню настройки EDM, нажав клавиши "SHIFT + DIST", при этом на экране дисплея появится окно, показанное на рис. 177.
|
EDM SETTINGS |
|
• |
||
Laser point |
: |
|
OFF ^ |
^ |
|
DistMode |
: |
|
IR Fine |
< |
• |
Prism Type |
: |
|
Round |
^ |
^ |
Prism Const: |
|
0 |
|
mm |
|
< EXIT > |
|
< ppm > |
< SET > |
||
Рис. 177. Изображение на экране дисплея при установке режимов работы
Стрелкой " • " опустить курсор на линию "Dist Mode", затем стрелками " < • " установить соответствующий режим измерений, например, "RL SHORT" (для расстояний до 80 метров при измерениях без отражателя), или "IR Fine" (режим высокоточных измерений на отражатель (например, при ориентировании прибора)). После чего опустить курсор на опцию "SET" и подтвердить выбранный режим.
При измерениях в режиме "RL" необходимо иметь в виду, что расстояния будут измеряться до всех объектов, попадающих в пучок лазера (ветки, люди, автомобили и т.д.).
Описание точки визирования
В диалоговом окне, показанном на рис. 176, задают информацию о точке визирования, на которой установлен отражатель. Pt ID - номер точки визирования (на рис. 176 — К2): активировать, поднимая курсор вверх, указанную строку, затем клавишей INS вызвать столбец, клавишами ^ или
• подвести в активированную строку соответствующий символ (переключение букв и цифр осуществляют через клавишу SHIFT), клавишами 4 или • сместить столбец на следующую позицию по строке. При ошибочном вводе сим-
221
вола нажать клавиши SHIFT + СЕ. Клавишей ENTER подтвердить ввод.
Опуская курсор вниз, аналогичным образом задать остальные параметры, например, hr - высота отражателя (на рис. 176 - 1,625 м) и клавишей SETUP подтвердить выбранные параметры точки визирования.
Расположение на табло символов • или ^ указывает на наличие других доступных окон, переход к которым осуществляют через клавиши SHIFT • .
Задание точки стояния и ориентирование прибора
После подтверждения клавишей SETUP точки визирования прибор переходит в режим задания параметров точки стояния и ориентирования прибора, при этом на дисплее появится окно (рис. 178). Здесь: St ID - номер точки стояния, hj - высота прибора. Выбранные параметры подтвердить клавишей ENTER.
St ID |
: |
SETUP |
|
1.634 m |
|||
hi |
|
||
Bs Pt |
: |
2 |
|
Bs Brg : |
o°oo'oow |
||
< EXIT > < H20 > < STAT > < SET >
Рис. 178. Окно при задании параметров точки стояния и ориентирования прибора
Для ориентирования полярным методом необходимо переместить курсор на строку BsPt и задать номер точки визирования, подтвердить клавишей ENTER, опустить курсор на строку BsBrg и вручную набрать дирекционный угол или установить его равным нулю, опустив курсор на указатель Hz0. Клавишей SET подтвердить ввод данных и выйти в окно измерений.
Клавиша STAT служит для ручного ввода координат точки стояния.
222
Методика работы при съемке
Съемку выполняют в программном модуле PROG. После входа в модуль PROG появится окно опции SURVEYING (рис. 179, а, б, в).
f |
SURVEYING |
S |
SURVEYING |
N |
Г |
SURVEYING |
^ |
|||||
Л ( |
^ |
|||||||||||
|
PtID |
: |
К2 |
|
PtID |
: |
К2 |
|
|
PtID : |
K2 |
|
|
hr |
|
1,625 |
|
hr |
|
1,625 |
|
|
hr |
1,625 |
|
|
Code : имя файла |
|
Code |
: имя файла |
|
|
Code: |
имя файла |
|
|||
|
Hz |
|
0°00'00" |
|
Hz |
: |
0°00'00" |
|
|
E (Y): |
125,342 m |
|
|
V |
: |
75°33'45" |
|
HD |
: |
m |
|
|
N (X) |
345,789 m |
|
|
SD |
: |
m |
|
DH |
m |
|
|
H |
65,098 m |
|
|
!^<EXIT> |
|
j |
<EXIT> |
|
|
1 < Е Х , Т > |
|
У |
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
а |
|
|
|
б |
|
|
|
в |
|
|
|
|
Рис. 179. Окна опции SURVEYING |
|
|
|||||||
Здесь можно изменить № точки визирования PtID, высоту отражателя hr, поместив курсор в область CODE, можно вызвать функции работы с кодами и ввести некоторые атрибуты (например, высоту прибора).
Начало измерений осуществляют клавишами ALL, DIST или USER (более удобный вариант при съемке: DIST и после
просмотра - USER). |
|
С помощью клавиш SHIFT и |
можно легко перехо- |
дить из одного окна в другое, показанные на рис. 179.
Исследования и поверки электронных тахеометров
Исследования и поверки электронных тахеометров в основном сводятся к следующим:
1) исследование внутришаговой погрешности интерполяции растрового сопряжения,
2)исследование диапазона и погрешности работы компенсатора наклона при вертикальном круге,
3)исследование масштабной частоты,
4)определение коллимационной погрешности и места зе-
нита,
5)проверка установки лазерного источника излучения в фокальной плоскости объектива,
223
6)поверки уровней, осей вращения, центрира и сетки нитей,
7)исследование погрешности средства измерения (см. Приложение 2).
Методика исследования внутришаговой погрешности интерполяции
Внутришаговую погрешность интерполяции в пределах одного периода растра исследуют, например, с помощью "образцового" теодолита:
а) отъюстированный на бесконечность теодолит более высокого класса точности измерения углов (например, ЗТ2КП) устанавливают соосно труба в трубу с испытуемым тахеометром,
б) горизонтируют оба прибора, в) перекрестие сетки нитей электронного тахеометра совме-
щают с перекрестием сетки нитей "образцового" прибора, г) отсчитывают по обоим приборам,
д) наводящим винтом соответствующего круга изменяют отсчет на электронном тахеометре на 10", наводящим винтом "образцового" прибора совмещают изображение его сетки нитей с сеткой нитей тахеометра, наблюдая в окуляр тахеометра,
е) отсчитывают по "образцовому" прибору, ж) повторяют измерения, каждый раз увеличивая (умень-
шая при обратном ходе) отсчет по электронному тахеометру, в пределах наименьшего периода растрового диска,
з) вычисляют внутришаговую погрешность А = Ртах - робр, и) строят график Д(р), на котором указывают размах внутришаговой погрешности ^ и значение угла Р, при котором
он достигается.
Циклическую погрешность дальномерной части тахеометра исследуют по методике, описанной в разделе 14.
Методика установки лазерного источника излучения в фокальной плоскости объектива
а) установить тахеометр на оптической скамье объективом в сторону коллиматора,
б) совместить перекрестия сеток нитей коллиматора и тахеометра,
224
в) установить на окуляр коллиматора ИК-микроскоп или видеокамеру,
г) на экране видеокамеры наблюдать положение точки свечения лазерного источника, если оно смещено относительно центра, то исправление выполнить смещением источника излучения в соответствующем направлении.
Остальные поверки и исследования аналогичны описанным выше для теодолита ЗТ2КП.
Исследование масштабной частоты (на примере ЗТа5Р)
Масштабную частоту f в тахеометре ЗТа5Р проверяют, подключив частотомер к клеммам, расположенным с правой стороны зрительной трубы, если смотреть при круге "лево" . При этом оплетку кабеля подключают к левой клем-
ме (корпус |
прибора). |
|
|
|
|
На экране дисплея необходимо последовательно устано- |
|||||
вить режим |
(рис. 180, а, б, в). Здесь Тинт - |
|
технологический |
||
параметр. |
|
|
|
|
|
меню |
Jm |
Гменю |
\ |
ввод |
|
|
|
конфигурация |
|
|
|
|
|
карта памяти |
|
|
|
|
|
|
—•режим T |
|
|
|
|
|
\ |
J |
|
CD |
меню*режимнаведение T |
"Л |
ввод |
|
|||
|
|
||
|
константы кварца |
|
|
|
контроль частоты |
|
|
|
|
Контроль |
|
в |
f |
частоты |
|
|
|
значение |
|
|
Тинт |
значение |
|
Рис. 180. Последовательность изображений на экране дисплея
225
Измеренное значение частоты необходимо удвоить и сравнить с паспортным значением.
Новым достижением в части совершенствования геодезических приборов явилось появление на рынке электронных тахеометров со следящим приводом (например, TSR1102 фирмы "Leica"), а также электронных тахеометров (например, TPS-300 (фирмы "Leica") и SET4110R (фирмы "Sokkia")) и лазерных рулеток (например, Disto (фирмы "Leica"), ММ 30 (фирмы "Sokkia"), DLE 30 (фирмы "Bosh") и др.), при работе с которыми не нужны отражатели.
Исследование диапазона работы компенсатора
Исследование диапазона работы компенсатора может быть выполнено по методике, описанной в разделе 12. При этом наклон прибора необходимо изменять до появления на экране дисплея ошибки компенсации: для тахеометра ТС600Е - ошибка 58 TILT, для тахеометра POWERSET2000 ~ TILT error, для тахеометра TCR305 - появление на экране наклоненного символа уровня, для тахеометров Rec Elta 14 и Trimble 3300 - error 202 (компенсатор вышел из рабочего диапазона).
Основные неисправности электронных тахеометров и их устранение
Кроме регулировки положения излучателя электронных тахеометров можно устранить также общие с теодолитами неисправности: перекос сетки нитей, загрязненность оптических деталей, заменить пружины наводящих винтов, ампулы уровней, отрегулировать ход подъемных винтов, выполнить юстировку оптического центрира и смазать осевые системы.
Порядок неполной разборки рассмотрим на примере тахеометра ТаЗМ.
Питание основных узлов в тахеометре ТаЗМ осуществляют через скользящий контакт между подставкой и алидадной частью прибора, поэтому при попадании пыли, грязи, появлении жирных пятен, а также при окислении контактирующих металлических поверхностей возможны сбои напряжения питания. В процессе эксплуатации необходимо следить за чистотой контактных колец подставки.
226
В сезонной смазке осей тахеометр не нуждается, однако, постепенно смазка высыхает, увеличивая трение между осью и втулкой. При попадании пыли можно повращать прибор в разных направлениях, если это не помогает, то прибор нужно отдать в мастерскую, так как разборка вертикальной оси в ТаЗМ приводит к разъюстировке системы оптического мостика и преобразователей угла. Смазка горизонтальной оси может быть выполнена без разборки тахеометра. Для этого тахеометр необходимо положить на боковую крышку и нанести 1-2 капли масла на стык оси с неподвижной втулкой-ла- герой, затем положить тахеометр на другой бок и смазать второй конец оси. После смазки необходимо повращать зрительную трубу на несколько полуоборотов.
Юстировку положения сетки нитей рассмотрим на примере электронного тахеометра ЗТа5Р. Наклон сетки нитей исправляют после снятия колпачка кремальеры, ослабив четыре закрепительных винта окуляра, поворотом корпуса окуляра. Для юстировки положения сетки нитей в коллимационной и вертикальной плоскостях устанавливают режим "наведение" (см. рис. 181,а) и входят в него (рис. 181, а, б), на расстоянии 20 -г- 50 м устанавливают однопризменный отражатель и визируют зрительную трубу, совместив центр трипель-призмы отражателя с перекрестием сетки нитей.
меню |
с |
меню*режим T |
ввод |
наведение |
|
дистТ |
|
|
|
|
|
наведение |
|
_ I |
|
|
константы кварца |
J |
|
|
\ |
|
||
|
а |
|
б |
|
Рис. 181. Изображение на экране в режиме наведения
Наводящим винтом в горизонтальной (или вертикальной) плоскости отводят зрительную трубу, например, вправо, уменьшая уровень сигнала до высвечивания одного сегмента между вертикальными штрихами (см. рис. 181,6), и запоминают положение перекрестия сетки нитей относительно центра трип- пель-призмы. Отводят зрительную трубу влево до высвечивания одного сегмента и запоминают положение перекрестия сетки нитей.
227

Если углы наклона зрительной трубы при ее отклонениях вправо и влево равны, то юстировка сетки нитей в горизонтальной плоскости выполнена правильно. Аналогичным образом исследуют положение сетки нитей в вертикальной плоскости, смещая зрительную трубу вертикальным наводящим винтом. Для смещения сетки нитей снимают кольцо кремальеры, регулировку выполняют четырьмя винтами аналогично исправлению коллимационной погрешности у теодолита ЗТ2КП. После чего исследование повторяют.
Устройство и методика работы лазерной рулеткой
В настоящее время лазерные рулетки выпускают известные фирмы "Leica", "Sokkia", "Topson", "Trimble" и др. Их технические характеристики известны [15, 61]: дальность измерений - до 400 м, погрешность измерений - 3 - 5 - 5 мм, не зависит от дальности измерений.
Панель управления лазерной рулетки HD360 (фирмы "Trimble") приведена на рис. 182, экран дисплея показан на рис. 183.
Рис. 182. Панель управления лазерной рулетки HD360:
1 - клавиша вкл/выкл; 2 - жидкокристаллический дисплей; клавиши:
3 - измерение; 4 - измерение расстояния; 5 - измерение площади; 6 - измерение объема; 7 - измерение недоступного расстояния; 8 - непрерывные измерения; 9 - скоба для измерения диагоналей помещения; 10 - визирная риска;
И - клавиша подсветки экрана дисплея; 12 - переключение единиц измерений (m/ft)
228
1 88.888 т 3
3 |
88.888 т 2 |
|
88.888 т |
||
|
||
|
8 8 8.8.8.8 |
Рис. 183. Экран дисплея лазерной рулетки HD360:
1 - готовность к измерению; 2 - режимы измерений (объема, площади, непрерывные измерения - трекинг и т.д.); 3 - заряд аккумулятора;
4 - результат отдельного измерения; 5 - результат вычислений
В лазерных рулетках типа D360, DISTO и др. заложен фазовый метод измерения расстояний.
Рассмотрим функциональную схему лазерной рулетки Disto (рис. 184) [15, 61]. Кварцевый масштабный генератор частотой 50 мГц модулирует излучение полупроводникового лазера. Коллимированный световой поток направляется на дистанцию, или с помощью оптического коммутатора ОК в режиме "ОКЗ" - непосредственно на приемник излучения ПИ.
Сигнал с селективного генератора, несущий информацию об измеряемом расстоянии, поступает на информационный вход фазометра.
На опорный вход фазометра поступает сигнал со схемы фазовой автоподстройки частоты ФАПЧ. Разность фаз двух сигналов пропорциональна измеряемому расстоянию в пределах фазового цикла, в линейной мере равного 3 м. Для разрешения неоднозначности результатов измерений в пределах 150 м предусмотрено измерение расстояния на масштабной частоте 1 мГц. Полученные сигналы обрабатывает и выводит на дисплей однокристальная ЭВМ.
Измеренные расстояния отсчитывают от задней стенки корпуса или от специальной скобы (поз. 9 на рис. 182), добавляя при этом к измеренному расстоянию 40 мм. Визирная риска 10 служит для направления прибора по линии измерения.
229

Рис. 185. Схема для вычисления неприступного расстояния с помощью лазерной рулетки
Выключение прибора осуществляют либо повторным нажатием на клавишу (см. рис. 182), либо он отключается автоматически через 5 минут после окончания измерений.
Доступ к программному обеспечению большинства тахеометров ограничен специальным паролем, который известен только представителям завода. Исполнитель может ввести полученные при исследованиях поправки в микропроцессорный блок и в дальнейшем их использовать.
ВНИМАНИЕ. При работе с электронными тахеометрами необходимо предусматривать следующие меры предосторожности:
1)прибор нельзя ставить на землю,
2)не направлять зрительную трубу на солнце,
3)избегать повреждения глаз от лазерного излучения,
4)защищать от прямых солнечных лучей,
5)не переносить на штативе,
6)выключать питание перед снятием аккумулятора,
7)перед укладкой в футляр снимать аккумулятор,
8)в футляр укладывать только сухой прибор.
Вывод. В исследованном электронном тахеометре № D20855:
1)диапазон работы компенсатора - не исследовали,
2)погрешность работы компенсатора - не исследовали,
3)внутришаговая погрешность интерполятора - не исследовали,
4)циклическая погрешность дальномера - не исследовали,
5)коллимационная погрешность - 4",
6)место зенита - 8".
231
Контрольные вопросы
1. Принципы построения преобразователей угла накопительного типа.
2.Принципы построения кодовых преобразователей угла.
3.Методы исследований внутришаговой погрешности преобразователей угла.
4.Методика исследования циклической погрешности дальномерной части тахеометра.