

доки по физике (2 семестр) / Teoreticheskaya_Mekhanika_voprosy_I_Otvety_opor
.pdfЭкз. билеты по теоретической механике (знать на память !) + Опорный конспект лекций по теоретической механике
СТАТИКА
1.Чем характеризуется сила?
2.Момент силы относительно точки и оси.
3.Главный вектор и главный момент системы сил.
4.Теорема Пуансо. Необходимые и достаточные условия эквивалентности сис-
темы сил. Н. и д. условия равновесия твердого тела.
5.Простейшие системы сил (нуль-вектор, равнодействующая, пара сил, динамический винт).
КИНЕМАТИКА
1. Абсолютная скорость и абсолютное ускорение точки.
2. Угловая скорость и угловое ускорение тела при его движении вокруг неподвижной оси.
3.Простейшие виды движения твердого тела (поступательное, плоскопараллельное, сферическое и вращательное).
4.Абсолютная скорость и ускорение точки при сложном движении. Теорема Кориолиса.
ДИНАМИКА
1.Первый, второй и третий законы Ньютона.
2.Количество движения материальной системы (МС). Теорема об изменении количества движения МС.
3.Момент количеств движения МС. Теорема об изменении момента количеств движения МС.
4.Элементарная работа силы.
5.Кинетическая энергия МС. Теорема Кенига. Теорема об изменении кине-
тической энергии МС.
6.Потенциальное силовое поле. Необходимые и достаточные условия потенциальности силового поля.
7.Закон сохранения полной механической энергии МС.
8.Центр масс МС. Теорема о движении центра масс МС.
9.Момент инерции тела относительно оси. Теорема Гюйгенса-Штейнера.
10.Уравнения Лагранжа второго рода. Обобщенные координаты, скорости и силы.
1
СТАТИКА
1. Чем характеризуется сила?
Сила есть мера механического взаимодействия между телами, в результате которого они могут деформироваться или приобретать ускорения, и характеризуется точкой приложения, модулем и направлением (линией действия силы).
2. Момент силы относительно точки и оси.
Момент силы относительно точки равен векторному произведению радиус-вектора точки приложения силы на вектор силы и направлен перпендикулярно плоскости, образованной радиус-вектором и вектором силы, в ту сторону, откуда "поворот" силы виден происходящим против хода часовой стрелки
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
j |
k |
|
|
|
|
= (Fx , Fy , Fz ) |
|
|||||
|
|
= |
|
× |
|
= |
x |
y |
|
z |
, |
|
= (x, y, z), |
|
. Момент силы отно- |
||||||
M |
r |
F |
r |
F |
|||||||||||||||||
|
|
|
|
|
|
|
Fx |
Fy |
Fz |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сительно оси равен проекции на эту ось момента данной силы относительно произвольной точки оси.
3. Главный вектор и главный момент системы сил.
Главный вектор равен геометрической сумме всех сил, действующих на твердое тело. Главный момент системы сил относительно выбранного полюса равен геометрической сумме всех моментов сил, относительно этого полюса
|
|
n |
|
n |
|
|
|
n |
|
||||||
|
F0 |
= ∑ |
F |
i , |
M 0 |
= ∑ |
M |
0 ( |
Fi |
) = ∑ |
ri |
× |
Fi |
|
. |
|
|
i=1 |
|
i=1 |
|
|
|
i=1 |
|
||||||
4. Теорема Пуансо. Необходимые и достаточные условия эквивалентности системы сил. Н. и д. условия равновесия твердого тела.
Любую систему сил, действующую на твердое тело, можно привести к одной силе, равной главному вектору и приложенной в произвольно выбранном центре приведения, и паре сил с моментом, равным главному моменту этой системы сил относительно данного центра приведения. Две системы сил эквивалентны тогда и только тогда, когда у них относительно одного и того же полюса соответственно равны главные вектора и главные моменты
M 01 = M 02 , F01 = F02 . Необходимыми и достаточными условиями равновесия
твердого тела являются равенства нулю главного вектора и главного момента
системы сил M 0 = 0, F0 = 0 .
5. Простейшие системы сил (нуль-вектор, равнодействующая, пара сил, динамический винт).
Нуль-вектором называется вектор, модуль которого равен нулю. Если систему сил можно привести к одной силе, не изменяя кинематического состояния твердого тела, то последняя называется равнодействующей. Парой сил называется совокупность двух сил, равных по модулю и противоположных по направлению. Динамическим винтом называется совокупность силы и пары сил с моментом коллинеарным силе.
2
КИНЕМАТИКА
1.Абсолютная скорость и абсолютное ускорение точки.
Винерциальной системе отсчета абсолютной скоростью точки называется полная производная радиус-вектора точки по времени. Абсолютным ускорением точки называется полная производная абсолютной скорости точки по
времени V = dr / dt,W = dV / dt = d 2 r / dt 2 .
2. Угловая скорость и угловое ускорение тела при его движении вокруг неподвижной оси.
При вращательном движении твердого тела вектор угловой скорости численно равен модулю полной производной угла поворота тела по времени и направлен в ту сторону, откуда поворот тела виден происходящим против хода часовой стрелки. Вектор углового ускорения тела равен полной производной
вектора угловой скорости по времени ω= dϕ/ dt k, ε = dω/ dt = d 2ϕ/ dt 2 k .
3.Простейшие виды движения твердого тела (поступательное, плоскопараллельное, сферическое и вращательное движения).
Поступательным движением твердого тела называется движение, при котором любая прямая, проведенная в теле, остается параллельной самой себе. Плоскопараллельным движением твердого тела называется движение, при котором любая точка тела движется в плоскости, параллельной некоторой заданной неподвижной плоскости. Сферическим движением называется движение твердого тела с одной неподвижной точкой. Вращательным движением называется движение твердого тела с двумя неподвижными точками. Ось, проходящая через эти две неподвижные точки, называется осью вращения тела.
4.Абсолютная скорость и ускорение точки при сложном движении. Теорема Кориолиса.
Абсолютная скорость точки при сложном движении равна сумме пере-
носной и относительной скоростей v =ve +vr =vA +ω×ρ+vr . Теорема Корио-
лиса: абсолютное ускорение точки при сложном движении равно сумме переносного, относительного и кориолисова ускорений
W =W e +W r +W c =W A +ε×ρ+ω×(ω×ρ) +W r + 2ω×vr .
ДИНАМИКА
1. Первый, второй и третий законы Ньютона.
Первый закон Ньютона (принцип инерции Галилея): изолированная материальная точка находится в состоянии покоя или равномерного прямоли-
нейного движения. Второй закон Ньютона (основной закон динамики): в
инерциальной системе отсчета сила, действующая на материальную точку, сообщает ей ускорение обратно пропорциональное массе точки, прямо пропор-
циональное величине силы и имеет направление силы m W = F . Третий закон
Ньютона: всякому действию соответствует равное и противоположно направленное противодействие.
3
2. Количество движения материальной системы (МС). Теорема об изменении количества движения МС.
Количество движения материальной точки есть вектор равный произве-
дению массы точки на вектор ее скорости Q = m v . Количество движения МС
есть вектор равный геометрической сумме векторов количеств движений материальных точек, входящих в МС Q = ∑ mk vk . Теорема об изменении количе-
k
ства движения МС: полная производная по времени вектора количеств движения МС равна главному вектору внешних сил, действующих на эту систему
ddQt = F0e .
3. Момент количеств движения МС. Теорема об изменении момента количеств движения МС.
Момент количеств движения материальной точки есть вектор равный векторному произведению радиус-вектора точки на вектор ее количеств движе-
ния K = r ×m v . Момент количеств движения МС есть вектор равный гео-
метрической сумме векторов моментов количеств движений материальных то-
чек, входящих в МС K = ∑ rk ×mk vk . Теорема об изменении момента ко-
k
личеств движения МС: полная производная по времени вектора момента количеств движения МС равна главному моменту внешних сил, действующих на
эту систему, относительно того же полюса ddtK 0 = M 0e .
4. Элементарная работа силы.
Элементарная работа силы, действующей на материальную точку, есть скалярная величина, численно равная скалярному произведению вектора силы
на элементарное перемещение этой точки dA = F d r .
5. Кинетическая энергия МС. Теорема Кенига. Теорема об изменении кинетической энергии МС.
Кинетической энергией материальной точки называется скалярная величина, равная половине произведения массы точки на квадрат ее скорости
T = 12 m v2 . Кинетической энергией МС называется сумма кинетических энер-
гий всех точек, входящих в МС |
T = |
1 |
∑ mk vk |
2 |
. Теорема Кенига: кинетиче- |
|
|
2 |
k |
|
|
ская энергия материальной системы равна сумме половины произведения массы МС на квадрат скорости центра масс МС и кинетической энергии движения
МС относительно ее центра масс |
T = |
1 |
M vC |
2 |
+TCr , |
M = ∑ mk |
. Теорема об |
2 |
|
||||||
|
|
|
|
|
k |
|
изменении кинетической энергии МС: изменение кинетической энергии МС на заданном перемещении равно сумме работ всех внешних и внутренних сил
4
на этом перемещении T −T0 = Ae + Ai .
6. Потенциальное силовое поле. Необходимые и достаточные условия потенциальности силового поля.
Силовым полем называется область пространства в котором вектор силы
задан аналитически как функция радиус-вектора силы и времени F = F(r,t) .
Потенциальным силовым полем называется поле в котором работа сил, действующих на точку, не зависит от траектории движения точки и определяется только начальным и конечным положением точки. Необходимым и доста-
точным условием потенциальности силового поля является существование
силовой функции П = П(r) , независящей от времени, такой, что
F |
= − |
∂П |
, F |
|
= − |
∂П |
, F |
= − |
∂П |
, |
|
= |
|
( |
|
) = |
|
(x |
, y |
, z |
,..., x |
|
, y |
|
, z |
|
) |
. |
|
|
F |
F |
r |
F |
n |
n |
n |
||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||
Xk |
|
|
Yk |
|
|
|
Zk |
|
1 |
1 |
1 |
|
|
|
|
|
|||||||||||||
|
|
∂x k |
|
∂yk |
|
∂zk |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
7. Закон сохранения полной механической энергии МС.
Закон сохранения полной механической энергии МС: В системе с кон-
сервативными (потенциальными) силами полная механическая энергия МС, равная сумме кинетической и потенциальных энергий МС, есть величина постоянная T + П = const .
8. Центр масс МС. Теорема о движении центра масс МС.
Центром масс МС называется абстрактная материальная точка с радиус-
вектором |
|
|
= |
1 |
∑ mk |
|
, M = ∑ mk |
. Теорема о движении центра масс |
|
rC |
rk |
||||||||
M |
|||||||||
|
|
|
|
k |
|
k |
|
МС: центр масс материальной системы движется как материальная точка, в которой сосредоточена масса всей системы и к которой приложен главный вектор
внешних сил, действующих на МС m ddtvC = F0e .
9. Момент инерции тела относительно оси. Теорема Гюйгенса-Штейнера. Моментом инерции твердого тела относительно оси называется скалярная величина численно равная интегралы по объему тела от квадрата кратчайшего расстояния (плеча) материальных точек тела до этой оси
I Z = ∫∫∫ hZ |
2 dV |
. Теорема Гюйгенса-Штейнера: момент инерции твердого тела |
V |
|
|
относительно оси равен моменту инерции тела относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела на
квадрат расстояния между этими осями I = IC +M d 2 .
10. Уравнения Лагранжа второго рода. Обобщенные координаты, скорости и силы.
Обобщенными координатами МС со связями называются полная система любых независимых координат МС. Обобщенной скоростью называется полная производная по времени от обобщенной координаты
• |
|
dqS |
|
|
|
qS |
= |
|
. Обобщенной силой QS , соответствующей обобщенной координате |
||
dt |
|||||
|
|
|
|
5

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
qS , |
называется скалярная величина численно равная |
|
QS = ∑ |
rk |
|
|
|
|
, где Fk |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Fk |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
∂qS |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
и rk |
-- |
главный вектор сил, приложенных к k-ой точке, |
и ее радиус-вектор. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Уравнениями |
|
|
|
|
|
|
|
|
|
Лагранжа |
|
|
|
|
|
|
|
|
|
|
второго |
рода |
|
|
|
|
|
называются |
|
|
|
|
|
уравнения |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
d ∂T |
|
|
|
|
|
|
|
|
∂T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
− |
|
|
|
=QS |
|
|
|
|
|
|
|
|
= − |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
• |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
∂q |
|
|
|
|
|
|
|
|
|
|
|
|
∂q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
dt |
∂qS |
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ОСНОВНЫЕ ФОРМУЛЫ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Статика |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= (Fx , Fy , Fz ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
× |
|
|
|
|
|
= |
|
|
|
|
x |
|
|
y |
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
, |
|
|
|
|
|
|
|
|
|
= (x, y,z), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
r |
F |
|
|
|
|
|
|
|
|
|
r |
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fx |
Fy |
|
|
|
|
|
|
|
|
|
Fz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
F0 |
= ∑ |
F |
i , |
|
|
|
|
|
M 0 |
|
|
= ∑ |
M |
0 ( |
Fi |
) |
|
= ∑ |
ri |
× |
Fi |
|
|
|
|
|
M 01 = M 02 , F01 = F02 |
|
M 0 = 0, F0 = 0 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кинематика |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/ dt = d 2 |
|
|
|
|
|
|
/ dt 2 |
|
|
|
|
|
|
|
= dϕ/ dt |
|
|
|
|
|
, |
|
|
|
|
= d |
|
|
|
|
|
/ dt = d 2ϕ/ dt 2 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
V |
= dr / dt,W = dV |
r |
ω |
k |
ε |
ω |
k |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
+ |
|
|
|
|
= |
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
ve |
vr |
vA |
ω×ρ+vr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
= |
W e |
|
|
|
+ |
W r |
|
+ |
W c |
= |
W A |
|
|
|
|
|
+ |
ε |
×ρ |
|
|
+ |
|
ω×(ω×ρ) +W r + 2ω×vr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Динамика |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
m |
W |
= |
F |
|
|
|
Q |
|
= m |
v |
|
|
|
|
|
Q |
|
= ∑ mk |
vk |
|
|
|
|
= |
|
F0e |
|
|
|
K |
= |
r |
|
×m |
v |
|
|
|
|
K |
|
= ∑ |
rk |
×mk |
vk |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
K 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T = |
1 |
|
m v2 |
|
T = |
1 |
∑ mk vk 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
M 0e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dA = |
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
M vC 2 +TCr , M = ∑ mk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
T = |
|
|
T −T0 = Ae + Ai |
|
|
|
|
|
|
|
= |
|
|
|
( |
|
|
,t) |
|
П = П( |
|
) |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
F |
F |
r |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
F |
= − |
∂П |
, F |
|
|
|
|
= − |
∂П |
, F |
|
|
|
|
|
|
|
|
|
|
= − |
|
∂П |
, |
|
|
|
= |
|
|
|
( |
|
|
) = |
|
|
|
(x |
, y |
|
|
|
, z |
,..., x |
|
|
|
, y |
|
|
, z |
|
) |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
F |
r |
F |
1 |
n |
n |
n |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
Xk |
|
|
|
|
|
|
|
|
∂x k |
|
|
|
|
|
|
|
|
|
Yk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂yk |
|
|
|
Zk |
|
|
|
|
|
|
|
|
|
∂zk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
∑ mk |
|
|
|
|
|
|
, M = ∑ mk |
|
|
|
d |
vC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
rC |
= |
|
|
|
|
rk |
|
m |
|
= |
F0e |
|
|
|
|
I Z |
= ∫∫∫ |
|
hZ |
2 dV |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
T + П = const |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dq |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
• |
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d ∂T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂П |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
I = IC +M d |
|
|
qS |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
QS = |
|
|
|
|
|
|
|
|
|
|
|
k |
|
Fk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=QS |
|
|
|
|
= − |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
∂q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
∂q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂q |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂qS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
6
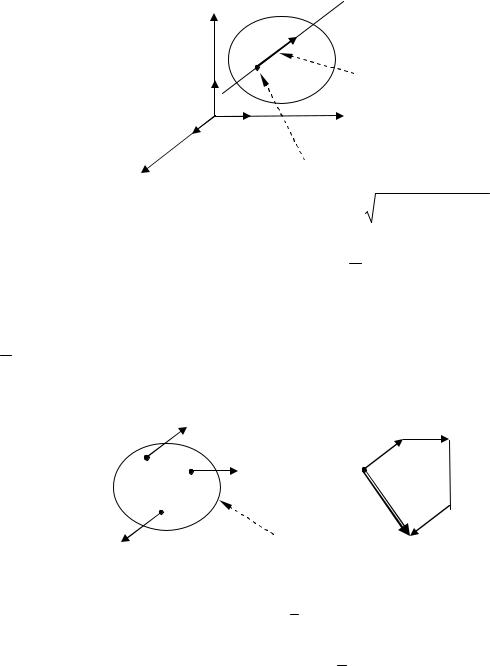
ОПОРНЫЙ КОНСПЕКТ ЛЕКЦИЙ ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ
СТАТИКА Сила есть мера механического взаимодействия твердых тел, в результате
которого тела могут приобретать ускорения или деформироваться. Сила есть векторная величина и характеризуется модулем, точкой приложения и направлением (линией действия силы).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
твердое тело |
|
|
|
|
|
линия |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
действия |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
силы |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сила |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
O j |
y |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
точка приложения силы |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
+ F |
|
|
|
|
|
|
|
|
|
|
|
|
|
, [F ]= H (Ньютон), |
|
F = F 2 + F 2 |
+ F 2 − модуль, |
|||||||||||||||||||||||||||||||||||
|
F |
|
= F i |
j |
|
+ F k |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
x |
y |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
y |
z |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
, j, k − единичныеорты, |
|
|
i |
= |
j |
= |
k |
|
=1. |
|||||||||||||||||||||||||||||||||
|
|
Главным вектором системы сил { |
|
|
,..., |
Fn } |
называется их геометриче- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
F1 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ская сумма |
|
|
|
= ∑ |
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
F0 |
Fi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
n |
n |
|||||||||
|
F0 =(F0x , F0 y , F0z ), |
|
= (Fix , Fiy , Fiz ), Fox = ∑Fix , Foy |
= ∑Fiy , Foz = ∑Fiz . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Fi |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i =1 |
|
|
i =1 |
i=1 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
|
F2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
полюс O |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F0 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fn |
|
|
твердое тело |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fn |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
Моментом силы относительно точки называется векторное произведе- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ние радиус-вектора точки приложения силы на вектор силы |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 ( |
|
)= |
r |
× |
|
|
|
= |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
F |
F |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
i |
|
|
j |
k |
|
|
(yFz − zFy )+ |
|
(zFx − xFz )+k |
(xFy − yFx )= (M 0 x , M 0 y , M 0z ), |
|||||||||||||||||||||||||||||||||||||||||||||||
= |
x y z |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
=i |
j |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Fx Fy Fz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
где M 0 x = yFz − zFy , |
|
|
|
|
|
M 0 y |
= zFx − xFz , M0 z = xFy − yFx − моменты силы от- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
носительно осей x, y и z.
7
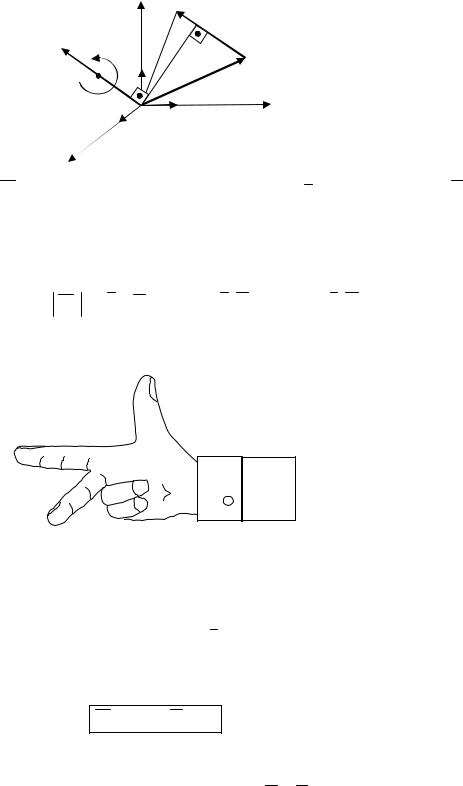
момент силы |
z |
|
F - сила |
M0(F) |
|
||
|
|
||
|
|
|
|
против хода ча- |
k |
|
h |
|
|
r – радиус-вектор |
|
совой стрелки |
|
|
|
|
|
|
|
|
O |
j |
y |
|
i |
|
h − плечо |
x |
|
|
Момент силы M 0 перпендикулярен радиус-вектору r и вектору силы F .
Положительным направлением момента силы считается направление, откуда поворот силы виден происходящим против хода часовой стрелки. В механике плечом называется кратчайшее расстояние от точки до линии действия силы. По абсолютной величине момент силы относительно точки равен произ-
ведению «силы на плечо»: M0 = r ×F = rF sin(r, F )= F (r sin(r, F ))= Fh.
Для определения направления момента силы удобно пользоваться «пра-
вилом правой руки».
M0(F)
r
F
правило правой руки
Главным моментом системы сил относительно выбранной точки называется геометрическая сумма моментов всех сил относительно этой точки
|
|
0 = ∑n |
|
|
0 ( |
|
)= ∑n |
ri |
× |
|
. |
|
M |
|
M |
Fi |
Fi |
||||||
|
|
i=1 |
|
|
|
|
i=1 |
|
|
|
|
Необходимым и достаточным условием равновесия системы сил яв-
ляется равенство нулю главного вектора и главного момента этой системы сил
M 0 = 0, F0 = 0,
Эти два векторных равенства эквивалентны шести скалярным равенствам
F0 x =0, F0 y = 0, F0 z = 0, M 0x = 0, M 0 y =0, M 0 z = 0.
Парой сил называется совокупность двух сил {F ,−F}, равных по модулю и противоположных по направлению.
Основные опоры и их опорные реакции в сопротивлении материалов имеют вид
8
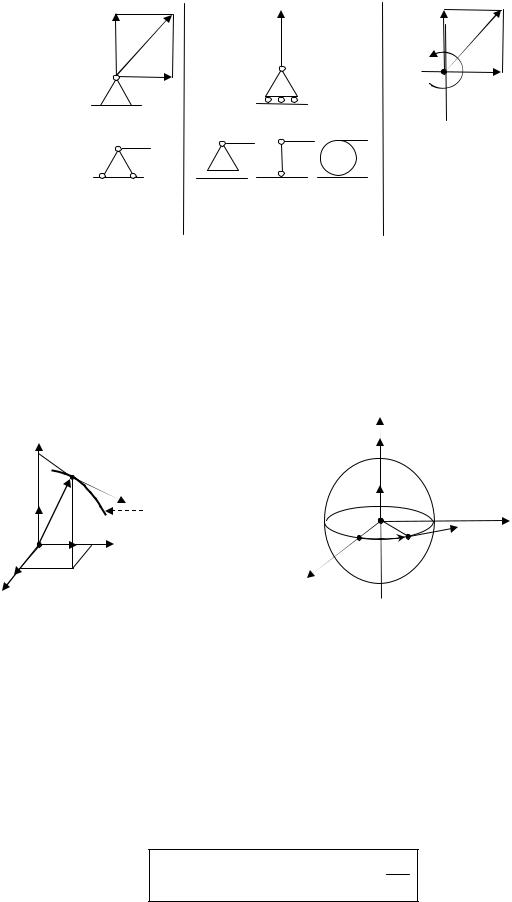
yA |
R=yA |
yA |
|
R |
A |
R |
|
A |
|
||
A |
xA |
||
xA |
|||
|
|
MA |
(a) |
(б) |
(с) |
цилиндрическая |
цилиндрическая |
жесткая заделка |
шарнирно- |
шарнирно- |
(защемление) |
неподвижная |
подвижная |
|
опора |
опора |
|
КИНЕМАТИКА
Рассмотрим декартову прямолинейную систему координат. z
z |
|
M(x,y,z) – точка |
|
ω − угловая скорость |
||
|
|
|
твердое тело |
|||
|
|
|
v – вектор скорости |
k |
||
k |
|
|
y |
|||
|
|
траектория точки |
O |
|||
O |
r – радиус-вектор |
v − скорость |
||||
|
||||||
i |
j |
y |
|i|=|j|=|k|=1 |
x |
ϕ − угол поворота тела |
|
x |
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|
||
Единичные вектора i, j, k , направленные вдоль соответствующих коор-
динатных осей x, y, z , называются единичными ортами.
В инерциальной (неподвижной) системе координат абсолютной скоростью точки называется векторная величина, численно равная полной производ-
ной радиус-вектора точки по времени |
|
|
|
|
|
|
|
v = dr / dt = lim r(t + |
t) − r(t) |
, |
[v]= |
м |
. |
t |
|
|||||
|
t→0 |
|
|
с |
||
Вектор скорости направлен по касательной к траектории точки в сторону ее движения.
Абсолютным ускорением точки называется векторная величина, численно равная полной производной абсолютной скорости точки по времени
W = dv / dt = d 2r / dt2, [W ]= см2 .
Простейшие движения твердого тела: поступательное, плоскопараллельное, сферическое и вращательное движения тела.
9
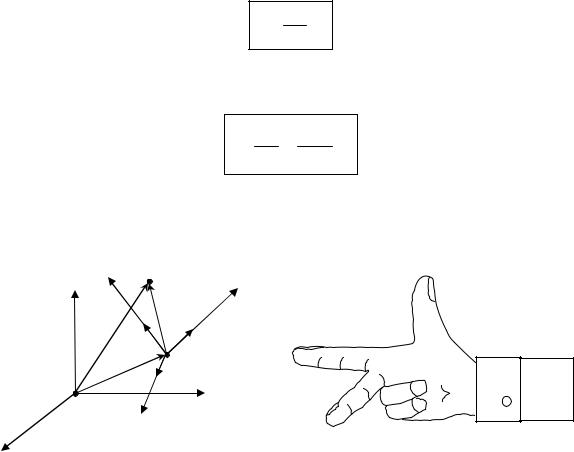
Поступательным движением твердого тела называется движение тела, при котором любая прямая, проведенная в теле, остается параллельной самой себе во все время движения.
Плоскопараллельным движением твердого тела называется движение, при котором любая точка тела движется в плоскости, параллельной некоторой фиксированной неподвижной плоскости.
Вращательным движением твердого тела (движением тела вокруг не-
подвижной оси) называется движение тела с двумя неподвижными точками. Ось, проходящая через две неподвижные точки, называется осью вращения тела (ось z).
Вектором угловой скорости при вращательном движении твердого тела называется векторная величина, численно равная полной производной угла поворота тела по времени и направленная в ту сторону, откуда поворот тела виден происходящим против хода часовой стрелки
ω= ddtϕ k .
Вектором углового ускорения при вращательном движении твердого тела называется векторная величина, численно равная полной производной вектора угловой скорости по времени
ε = dω = d 22ϕ k . dt dt
Сферическим движением твердого тела называется движение тела с одной неподвижной точкой. При сферическом движении тело в каждый фиксированный момент времени совершает вращательное движение с некоторой мгно-
венной угловой скоростью ω вокруг некоторой
|
|
z |
M |
|
|
y |
WC |
z1 |
|
|
|
|
|
||
r |
|
ρ |
|
|
ω |
||
|
|
j |
|
|
|||
|
k |
|
|
|
|||
|
|
|
|
|
|||
|
|
A |
|
|
|
||
|
|
rA |
|
|
|
|
|
O |
|
i |
|
y1 |
|
|
|
|
|
x |
|
|
vr |
||
|
|
|
|
|
|
||
x1 |
|
|
|
|
|
|
правило правой руки |
Сложным движением точки М называется движение точки относительно подвижной системы координат. Рассмотрим инерциальную (неподвижную) систему координат O1x1y1z1 . Пусть подвижная система координат Ox2y2z2 движется поступательно относительно неподвижной системы координат. Пусть система координат Oxyz совершает вращательное движение относительно подвижной системы координат Ox2y2z2 с мгновенной угловой скоростью ω . Движение точки M относительно неподвижной системы координат называется абсолютным движением точки, а движение точки M относительно подвижной системы координат Oxyz называется относительным движением точки.
10