Московский Институт Электронной Техники
Кафедра САУиК
Курсовая работа по ТАУ
Вариант 16
Выполнил студент гр.АиЭМ-31
Стругов С.А.
Проверил: Таран В.А.
Москва 2001
-
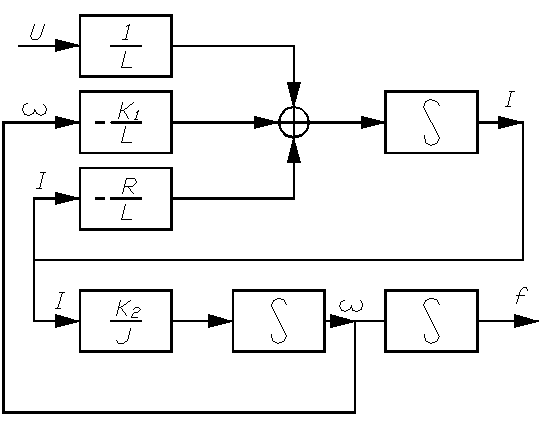
Составить структурную схему объекта управления.
Исходные данные:
|
Номер варианта |
16 |
|
Модель |
ДПМ-13 |
|
Мощность, Вт |
|
|
Напряжение, В |
12 |
|
Ток, А |
0.11 |
|
Скорость вращения, об/мин |
4500 |
|
Вращающий момент, Н/м |
0.15 |
|
Момент инерции, кг/м2 |
0.004 |
|
Сопротивление, Ом |
28 |
|
Индуктивность, Гн |
0.048 |
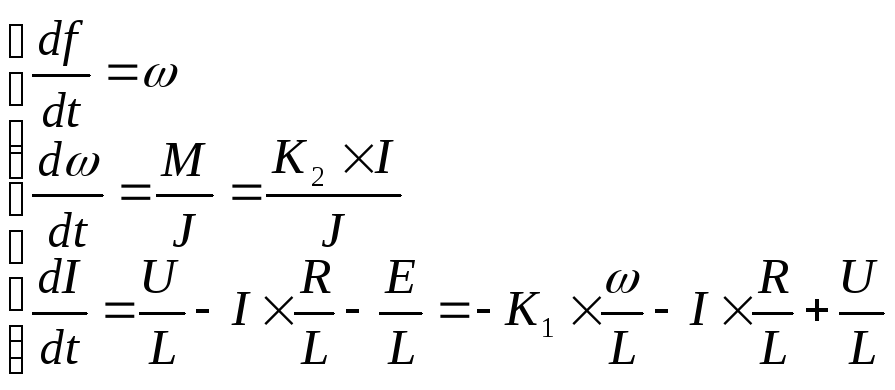
Объект управления – электрический привод с двигателем постоянного тока, описываемый уравнениями:
уравнение электрической цепи двигателя:
![]()
И ндуктивность:
ндуктивность:
уравнение моментов:
![]()
уравнение редуктора:
![]()
где:
![]() -
напряжение на якоре двигателя.
-
напряжение на якоре двигателя.
![]() -
ток якоря.
-
ток якоря.
![]() -
ЭДС вращения.
-
ЭДС вращения.
![]() -
момент, развиваемый двигателем.
-
момент, развиваемый двигателем.
![]() -
угол поворота вала двигателя.
-
угол поворота вала двигателя.
![]() -
угол поворота вала редуктора.
-
угол поворота вала редуктора.
![]() -
угловая скорость.
-
угловая скорость.
![]() -
коэффициент передачи редуктора.
-
коэффициент передачи редуктора.
![]() -
сопротивление и индуктивность якоря.
-
сопротивление и индуктивность якоря.
![]() -
конструктивные параметры двигателя.
-
конструктивные параметры двигателя.
![]() -
момент инерции.
-
момент инерции.
![]() -
передаточное число редуктора
-
передаточное число редуктора
Рассчитаем коэффициенты К1К2:
![]()
![]()
Напишем систему уравнений описывающих систему:
Структурная схема объекта управления:
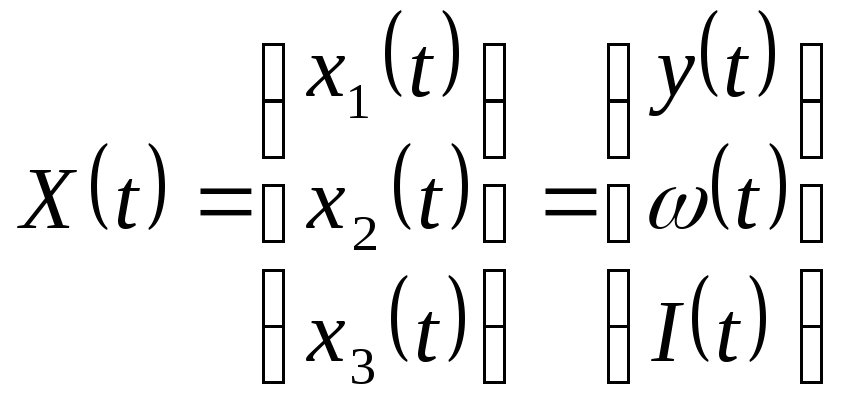
Система дифференциальных уравнений в форме Коши:

где:

-
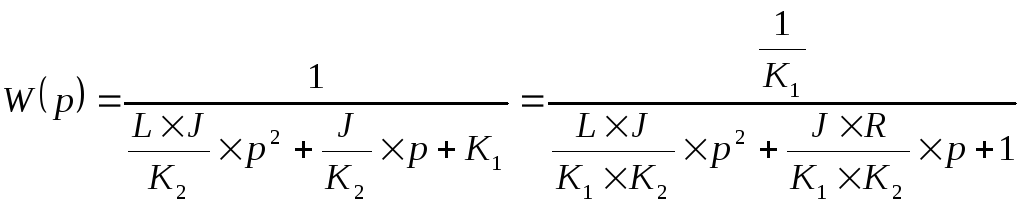
Определить передаточную функцию объекта управления.
Из написанной выше системы выразим:
![]()
далее:
![]()
Передаточная функция:
![]()
![]()
после подстановки:
![]()
![]()
если представить в стандартном виде, то получим:
![]()
где:
![]()
![]()
![]()
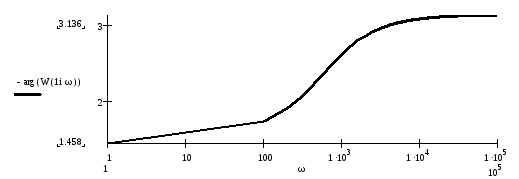
3. Построить логарифмические и переходную характеристики объекта.
Изображение
переходной характеристики:
![]()


4. Составить уравнения состояния непрерывного объекта.

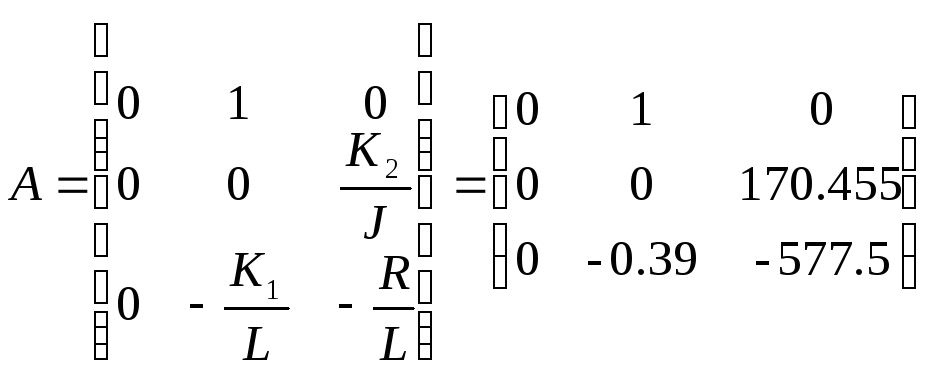
 ;
;
![]()
5. Определить период квантования управляющей ЦВМ.
Написав в среде математической обработки MatCad:
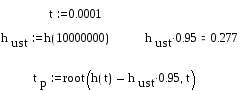
получаем время переходного процесса:
![]()
а соответственно период квантования центральной ЦВМ составит:
![]()
Уменьшаем период дескретизации в 64 раза Т = 0.0505.
6. Составить уравнения состояния дискретной модели объекта.
![]()
матрица Ad
1.0000000000E+00 5.0363171950E-02 1.4511314812E-02
0.0000000000E+00 9.9429238051E-01 3.3497858597E-01
0.0000000000E+00 -9.4975655781E-04 2.0946383714E-01
матрица Bd
7.2400403570E-03
2.9421292212E-01
3.1850574204E-02


Матрица управляемости дискретной модели объекта:
![]()
в числах:
7.2400403570E-03 2.2519730053E-02 3.7882749164E-02
2.9421292212E-01 3.0320292702E-01 3.0361358101E-01
3.1850574204E-02 6.3921128356E-03 1.0509475137E-03
det Sco =-9.5532200265E-05
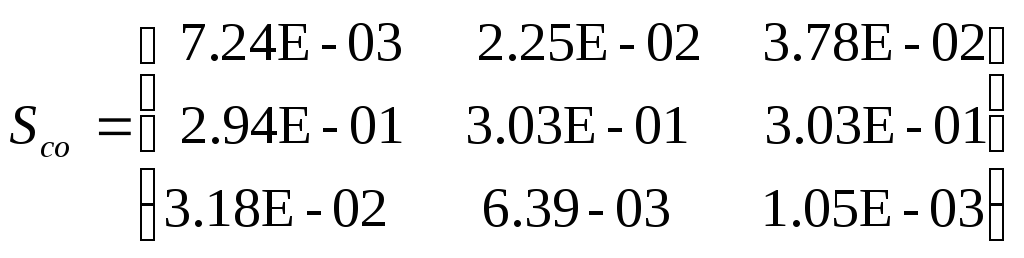
![]()
т.е. система полностью управляема.
Матрица наблюдаемости дискретной модели объекта:
в числах:
1.0000000000E+00 0.0000000000E+00 0.0000000000E+00
1.0000000000E+00 5.0363171950E-02 1.4511314812E-02
1.0000000000E+00 1.0042510786E-01 3.4421494620E-02
det Sob = 2.7627529704E-04

![]()
т.е. система полностью наблюдаема.
Вектор наблюдаемости:
2.2037562177E+00
2.4153023385E+01
1.6552405220E+00
7. Рассчитать параметры цифрового регулятора состояния.
Матрица управления из условия окончания переходного процесса за минимальное число тактов:
![]()
где:
![]()
в числах:
8.1402345058E+01 5.2713796001E+00 1.9934321467E+00
![]()
8. Рассчитать параметры оптимального быстродействию наблюдателя состояния и составить его структурную схему.
Вектор наблюдаемости:

Структурная схема наблюдателя:
9. Записать уравнения состояния замкнутой цифровой системы и составить её структурную схему.
Уравнения состояния наблюдателя:

Структурная схема наблюдателя, замкнутой цифровой системы:

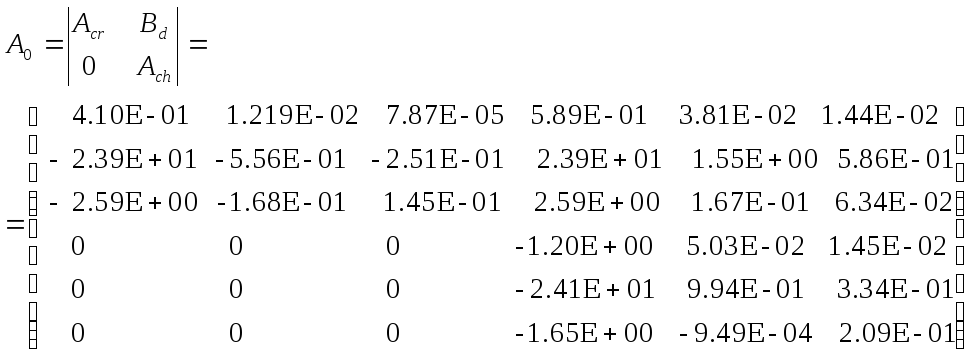
Матрица замкнутой системы с регулятором состояния:

Матрица замкнутой системы с регулятором состояния
Acr=Ad-Bd*Rx
4.1064373662E-01 1.2198170908E-02 7.8785621270E-05
-2.3949621807E+01 -5.5661561523E-01 -2.5151491096E-01
-2.5927114317E+00 -1.6884622367E-01 1.4597187863E-01
Если
посмотреть матрицу
![]() ее определитель очень близок к нулю,
т.е. за три такта процесс полностью
устанавливается.
ее определитель очень близок к нулю,
т.е. за три такта процесс полностью
устанавливается.
Собственная матрица наблюдателя:

Собственная матрица наблюдателя
Ach=Ad-Hx*C
-1.2037562177E+00 5.0363171950E-02 1.4511314812E-02
-2.4153023385E+01 9.9429238051E-01 3.3497858597E-01
-1.6552405220E+00 -9.4975655781E-04 2.0946383714E-01
Если
посмотреть матрицу
![]() то увидим, что она очень мала, т.е. за три
такта процесс полностью устанавливается.
то увидим, что она очень мала, т.е. за три
такта процесс полностью устанавливается.
Вектор состояния замкнутой системы с регулятором и наблюдателем:

где:
![]() - переменные
состояния объекта.
- переменные
состояния объекта.
![]() - переменные
состояния наблюдателя.
- переменные
состояния наблюдателя.
![]()
Матрица замкнутой системы с регулятором состояния и наблюдателем:
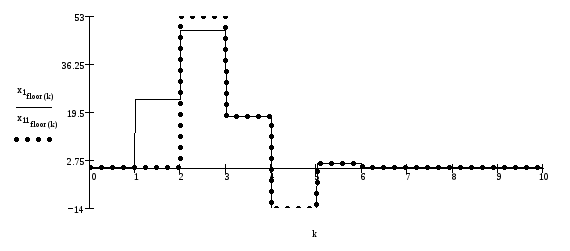
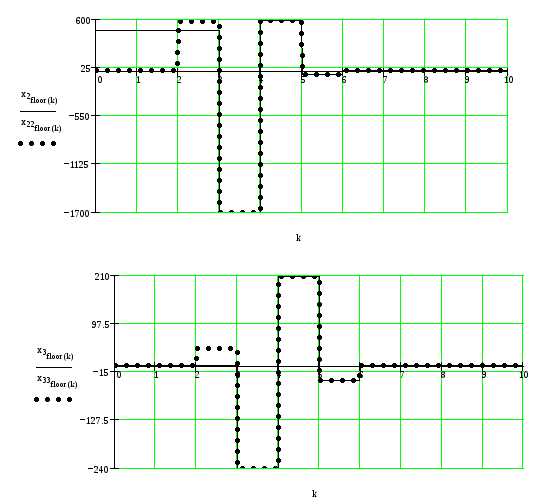
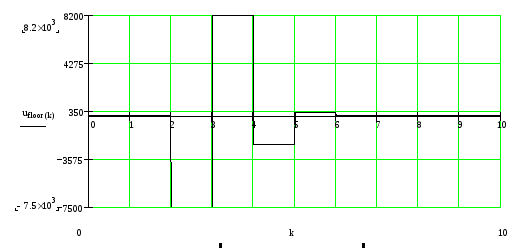
10. Рассчитать и построить графики сигналов в цифровой системе с наблюдателем и регулятором состояния.
Вектор начальных условий:
![]()
![]()
![]()
![]()
_
x1(0)=0
_
x2(0)=0
_
x3(0)=0
Решение уравнений состояния
_ _ _ _
k ¦ x1(k) ¦ x1(k) ¦ x2(k) ¦ x2(k) ¦ x3(k) ¦ x3(k) ¦ u(k) ¦
------------------------------------------------------------------- ----------------------------------
0 ¦ 0.0E+00 ¦ 0.0E+00 ¦ 4.8E+02 ¦ 0.0E+00 ¦ 1.1E-01 ¦ 0.0E+00 ¦ 0.0E+00
1 ¦ 2.4E+01 ¦ 2.9E-11 ¦ 4.8E+02 ¦ 0.0E+00 ¦-4.3E-01 ¦ 1.2E-10 ¦-2.6E-09
2 ¦ 4.8E+01 ¦ 5.3E+01 ¦ 4.7E+02 ¦ 5.8E+02 ¦-5.4E-01 ¦ 4.0E+01 ¦-7.5E+03
3 ¦ 1.8E+01 ¦ 1.8E+01 ¦-1.7E+03 ¦-1.7E+03 ¦-2.4E+02 ¦-2.4E+02 ¦ 8.2E+03
4 ¦-1.4E+01 ¦-1.4E+01 ¦ 6.0E+02 ¦ 6.0E+02 ¦ 2.1E+02 ¦ 2.1E+02 ¦-2.4E+03
5 ¦ 1.6E+00 ¦ 1.6E+00 ¦-5.4E+01 ¦-5.4E+01 ¦-3.4E+01 ¦-3.4E+01 ¦ 2.2E+02
6 ¦-1.0E-10 ¦-1.0E-10 ¦ 4.9E-09 ¦ 4.9E-09 ¦ 1.7E-09 ¦ 1.7E-09 ¦-2.0E-08
7 ¦ 1.7E-11 ¦ 1.7E-11 ¦-6.3E-10 ¦-6.3E-10 ¦-3.1E-10 ¦-3.1E-10 ¦ 2.6E-09
8 ¦-8.7E-13 ¦-8.7E-13 ¦ 2.9E-11 ¦ 2.9E-11 ¦ 1.8E-11 ¦ 1.8E-11 ¦-1.2E-10
-
¦ 9.6E-22 ¦ 9.6E-22 ¦-4.2E-20 ¦-4.2E-20 ¦-1.6E-20 ¦-1.6E-20 ¦ 1.7E-19
-
¦-1.1E-22 ¦-1.1E-22 ¦ 4.3E-21 ¦ 4.3E-21 ¦ 2.1E-21 ¦ 2.1E-21 ¦-1.8E-20
¦Umax¦ = 8.1506124454E+03
Графики сигналов в цифровой системе с наблюдателем: