

Кинематика материальной точки
1.20
|
Дано
|
|
|
Найти
a)
|
точка возврата
![]()
![]()
![]()
![]()
1.21
|
Дано
|
|
|
Найти a) x при t = 6,0; 10; 20 c б) t при x = 10,0 см |
![]()
![]()
![]()
![]()
![]()
![]() t1
= 1,1 с t2 = 8,9 с
t1
= 1,1 с t2 = 8,9 с
![]() t3
= 10,9 с t4 = −0,9 с
– физического смысла не имеет
t3
= 10,9 с t4 = −0,9 с
– физического смысла не имеет
1.24
|
Дано
|
x(t)
=
t
|
|
а) y(x)
– ?
б)
|
![]()

![]()
1.26
|
Дано x = A sin t y = A (1 − cos t) A, > 0 – const |
|
|
а) s()
– ?
б)
|
![]()
![]()
![]()
1.30
|
Дано
а)
|
|
|
Найти 0 – ? |

![]() 0
= 60°
0
= 60°
![]() h
= Rв
h
= Rв ![]() tg2
0
= 2
tg2
0
= 2
![]() 0
= 54,7°
0
= 54,7°
1.34
|
Дано vy = v0 vx = y – const |
|
|
а) x(y)
– ?
б)
|
![]()
![]()


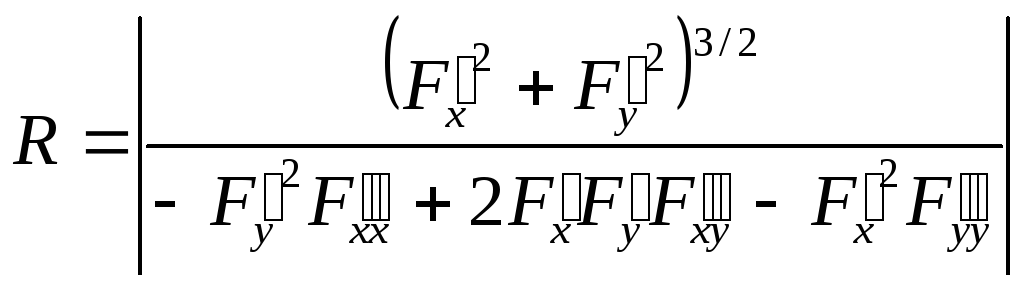
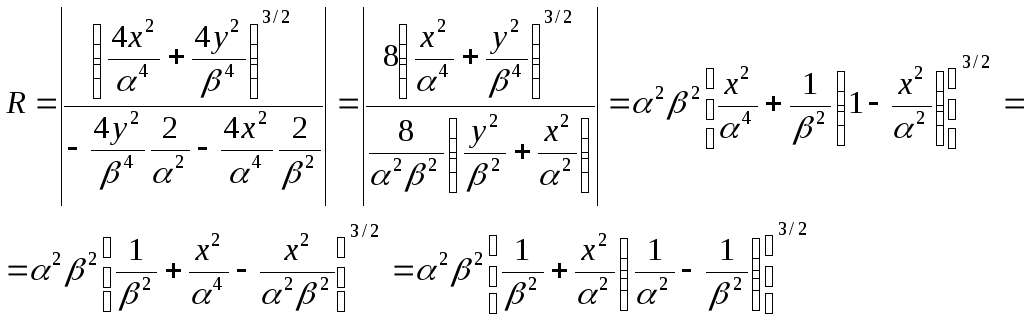
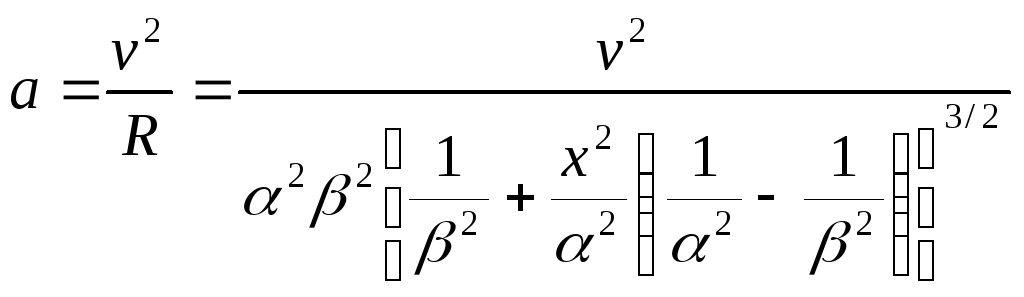
1.42
|
Дано
v
y(x)
а)
y = x2
б)
|
|
|
Найти a(x = 0) – ? R(x = 0) – ? |
![]()
![]()
![]()
![]() F″xy
= 0
F″xy
= 0
![]()
![]()
Кинематика твёрдого тела
1.44
|
Дано: (t) = t2 = 0,20 рад/с2 t1 = 2,5 c v(t1) = 0,65 м/с |
|
|
Найти: a(t1) – ? |


![]() м/с2
м/с2
1.47
|
Дано:
(t)
=
t
= 2,0·10−2 рад/с3
|
|
|
Найти: t1 – ? |
1.52
|
Дано: R = 0,50 м v0 = 1,00 м/с |
|
|
Найти:
а)
|

y = 0 R
− R cos
t = 0 cos
t = 1
t = 2
n ![]()


1.55
|
Дано:
1
= 3,0 рад/с
2
= 4,0 рад/с
|
|
|
Найти: отн. – ? отн. – ? |
1.56
|
Дано:
|
|
|
Найти: (t1) – ? (t1) – ? |
1.58
|
Дано:
0
= 0,50 рад/с
0
= 0,10 рад/с2
|
|
|
Найти: (t1) – ? (t1) – ? |


Динамика в инерциальных системах отсчёта
1.82
|
Дано:
m
|
|
|
Найти: s(t) – ? |
![]()
1.83
|
Дано:
m
|
|
|
Найти: tост – ? s(tост) – ? vmax – ? |

1.84
|
Дано:
m
v0
|
|
|
Найти: а) tост – ? б) v(s) – ? в) s(tост) – ? |
![]()
![]()
![]()
![]()
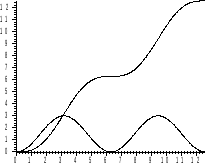
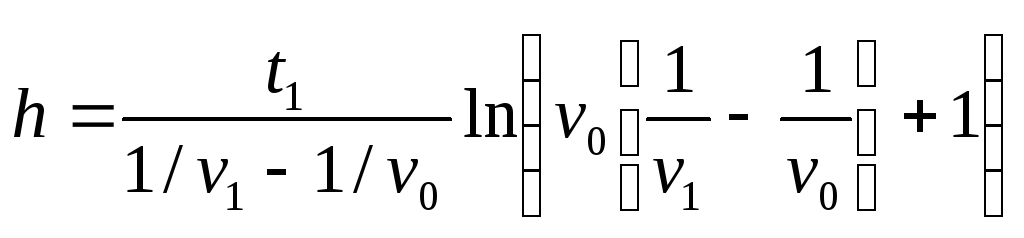
1.85
|
Дано:
h
v0
v1
|
|
|
Найти: t1 – ? |


![]()
![]()
Динамика в неинерциальных системах отсчёта
1.103
|
Дано: R |
Fцб
= 2R
sin Fцб
cos
= g sin
2R
sin
cos
− g sin
= 0
(2R
cos
− g) sin
= 0
sin
= 0 2R
cos
− g = 0
= 0
= |
|
|
Найти: – ? |

1.104
|
Дано: = 60° v0 = 900 м/с s = 1,0 км TЗ = 24 ч |
x
= v0t ay
= −2Зv0
sin vy
= −2Зv0t
sin y
= −Зv0t2
sin
|
|
Найти: r – ? |
 r
= 0,07 м
r
= 0,07 м
1.105
|
Дано: m = 60 кг R = 3,0 м = 1,00 рад/с Fин = 0 |
aин
= 0 |
|
Найти: Fпл, гор – ? |
![]() Н.
Н.
1.106
|
Дано: m = 2000 т = 60° v = 54 м/с RЗ = 6,37·106 м TЗ = 24 ч |
|
|
Найти: а) Fбок – ? б) v(Fин = 0) – ? |
![]()
![]() на
запад
на
запад
Динамика в инерциальных системах отсчёта
1.82
|
Дано:
m
|
|
|
Найти: s(t) – ? |
![]()
1.83
|
Дано:
m
|
|
|
Найти: tост – ? s(tост) – ? vmax – ? |

1.84
|
Дано:
m
v0
|
|
|
Найти: а) tост – ? б) v(s) – ? в) s(tост) – ? |
![]()
![]()
![]()
![]()
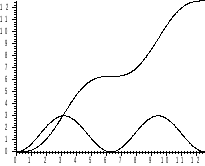
1.85
|
Дано:
h
v0
v1
|
|
|
Найти: t1 – ? |

![]()
![]()
Динамика в неинерциальных системах отсчёта
1.103
|
Дано: R |
Fцб
= 2R
sin Fцб
cos
= g sin
2R
sin
cos
− g sin
= 0
(2R
cos
− g) sin
= 0
sin
= 0 2R
cos
− g = 0
= 0
= |
|
|
Найти: – ? |

1.104
|
Дано: = 60° v0 = 900 м/с s = 1,0 км TЗ = 24 ч |
x
= v0t ay
= −2Зv0
sin vy
= −2Зv0t
sin y
= −Зv0t2
sin
|
|
Найти: r – ? |
 r
= 0,07 м
r
= 0,07 м
1.105
|
Дано: m = 60 кг R = 3,0 м = 1,00 рад/с Fин = 0 |
aин
= 0 |
|
Найти: Fпл, гор – ? |
![]() Н.
Н.
1.106
|
Дано: m = 2000 т = 60° v = 54 м/с RЗ = 6,37·106 м TЗ = 24 ч |
|
|
Найти: а) Fбок – ? б) v(Fин = 0) – ? |
![]()
![]() на
запад
на
запад