

Avtomatizatsia_lektsii / 2_1
.doc2. Основы теории автоматического регулирования.
2.1 Системы автоматического регулирования (САР)
Основные показатели САР
Процесс регулирования. Нагрузка на систему автоматического регулирования непрерывно изменяется. С увеличением нагрузки растет рассогласование ΔХ. Автоматический регулятор, улавливая это рассогласование, изменяет регулирующее воздействие. При этом оно становится больше нагрузки, а ΔХ уменьшается и может принять отрицательные значения. Тогда регулятор снова уменьшит регулирующее воздействие. Даже если наступит равенство МР=МН, то значение X долго оставаться постоянным не будет, так как нагрузка вновь изменится. Непрерывное изменение регулируемого параметра во времени Х=f(τ) называют процессом регулирования. В действующей системе этот процесс можно наблюдать по измерительным приборам или записывать его на ленте в координатах X, τ. Однако для правильного выбора регулятора и его настройки необходимо заранее знать, как пойдет процесс регулирования, т. е. необходима количественная оценка этого процесса.
Для каждого объекта на основании физических законов можно составить уравнение, показывающее, как изменится регулируемый параметр Х(τ) с изменением нагрузки на объект Мн и регулирующего воздействия Мр. Это уравнение называют уравнением объекта:
![]() (2.3)
(2.3)
Вместе с тем изменение Х(τ), воздействуя на регулятор (обратная связь), вызывает однозначное изменение регулирующего воздействия. Эту зависимость называют уравнением регулятора:
![]() (2.4)
(2.4)
Для системы в целом входным воздействием является только нагрузка (если задающее воздействие X3 = const, т. е. система стабилизирующая). Поэтому, чтобы найти зависимость Х(τ) от нагрузки, надо из уравнений (2.3) и (2.4) исключить МР. В результате получим
![]() (2.5)
(2.5)
Это дифференциальное уравнение системы (сюда могут входить и производные от X и Мн) описывает процесс регулирования. Для решения уравнения его удобнее представить в безразмерной форме
![]() (2.5а)
(2.5а)
где х — безразмерная регулируемая величина;
![]() ;
;
![]() - безразмерная
нагрузка;
- безразмерная
нагрузка;
![]() ;
;
![]() и
и
![]() —
отклонения регулируемой величины и
нагрузки от своих начальных значений
Х0
и
Мно;
за
начальные обычно принимают средние
расчетные
значения.
—
отклонения регулируемой величины и
нагрузки от своих начальных значений
Х0
и
Мно;
за
начальные обычно принимают средние
расчетные
значения.
Чтобы
решить уравнение (2.5а), надо задать
характер изменения нагрузки
![]() и проинтегрировать это уравнение.
и проинтегрировать это уравнение.
Виды нагрузок. Нагрузка изменяется с течением времени произвольно. Однако для изучения влияния нагрузки на процесс регулирования целесообразно рассмотреть три характерных вида нагрузки: ступенчатую, импульсную и синусоидальную (рис. 6).
Ступенчатая
нагрузка
—
это нагрузка, которая в определенный
момент времени (например, τ=0)
изменяется скачком от
0 до
![]() (рис. 6,а)
и остается на этом уровне. Ступенчатая:
функция,
у которой величина скачка равна 1,
называется единичной
и обозначается 1.
Значению
μ=1
соответствует увеличение
нагрузки в два раза.
(рис. 6,а)
и остается на этом уровне. Ступенчатая:
функция,
у которой величина скачка равна 1,
называется единичной
и обозначается 1.
Значению
μ=1
соответствует увеличение
нагрузки в два раза.
![]() (2.6)
(2.6)
Ступенчатую нагрузку применяют для испытания систем, но часто она встречается и в действительных условиях (например, включили и оставили освещение в холодильной камере, открыл» вентиль расхода газа из системы и т. д.).
Импульсная
нагрузка
—
это ступенчатая нагрузка, которая через
короткий промежуток времени исчезает
(рис. 6,б).
Если продолжительность
импульса составляет
![]() ,
а
величину его принять
равной
,
а
величину его принять
равной
![]() ,
то
такую импульсную функцию называют
единичной
(площадь S
равна единице). На практике воздействие
на
систему, близкое к импульсному, встречается
очень часто: кратковременное
открывание дверей в камере, кратковременное
,
то
такую импульсную функцию называют
единичной
(площадь S
равна единице). На практике воздействие
на
систему, близкое к импульсному, встречается
очень часто: кратковременное
открывание дверей в камере, кратковременное

Синусоидальной
называют
нагрузку,
меняющуюся
по синусоиде.
В тех случаях, когда внешнее
воздействие на систему
периодически меняется по
значению и по знаку, его с некоторым
приближением
можно
изобразить в виде синусоиды:![]() ,
где А
—
амплитуда колебания, а
ω
— частота колебаний. Примером
такой нагрузки могут служить
теплопритоки через ограждения крупных
холодильников,
так как температура
наружного воздуха в течение
суток меняется примерно по
синусоиде.
,
где А
—
амплитуда колебания, а
ω
— частота колебаний. Примером
такой нагрузки могут служить
теплопритоки через ограждения крупных
холодильников,
так как температура
наружного воздуха в течение
суток меняется примерно по
синусоиде.
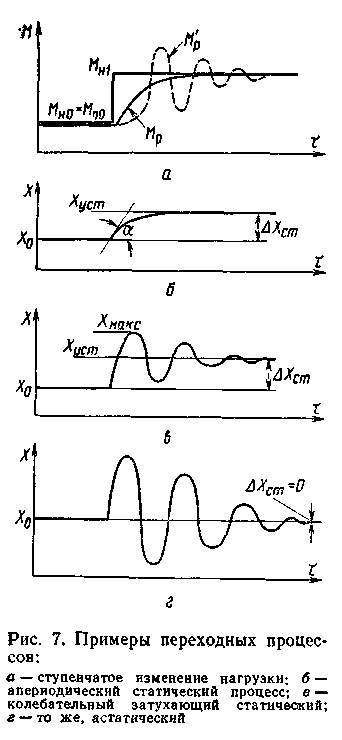
Переходный процесс. Для изучения свойств систем автоматического регулирования применяют, как правило, ступенчатую нагрузку. Эта нагрузка обычно наиболее тяжелая для системы, и, кроме того, ее легко осуществить. Процесс регулирования, вызванный ступенчатым изменением нагрузки, называют переходным процессом (переходной характеристикой).
Зная переходный процесс (т. е. реакцию системы на ступенчатую нагрузку), можно определить процесс регулирования и при других типах нагрузки, так как с некоторым приближением переменную нагрузку на небольших участках можно заменить ступенчатой. На рис. 7,б—г представлены переходные процессы, вызванные одинаковой ступенчатой нагрузкой, показанной на рис. 7,а. Если воздействие на объект Мp, непрерывно изменяющееся, не превышает величины нагрузки, то регулируемая величина плавно достигает своего нового установившегося значения Хуст, не превышая его в течение переходного периода. Скорость изменения X (тангенс угла α) уменьшается, не меняя знака. Такой процесс называется апериодическим (рис. 7,б). Когда небольшое отклонение регулируемой величины вызывает резкое изменение регулирующего воздействия и значение его М/р оказывается больше нагрузки (пунктир на рис. 7,а), то в системе возникает колебательный (обычно затухающий) процесс (рис. 7,в). С течением времени регулируемая величина принимает новое значение, соответствующее изменившейся нагрузке. Отклонение нового установившегося значения Хуст от заданного Х0 называют статической ошибкой
![]()
а системы, имеющие статическую ошибку, называют статическими. Если в системе по окончании переходного процесса статическая ошибка исчезает (равна нулю), то такую систему называют астатической (рис. 7,г).
Статическая
характеристика системы.
Меняя величину ступенчатой
нагрузки, можно получить различные
переходные процессы
(рис. 8,а).
При
этом в статической системе каждой
нагрузке
будет соответствовать свое значение
статической ошибки.
Можно построить график (рис. 8,б,
кривая 1),
показывающий
зависимость установившегося значения
выходной величины
от нагрузки. Такой график называется
статической
характеристикой системы.
Зная пределы действительных значений
нагрузки
(от Мн.мин
до Мн
макс),
по графику можно определить пределы
изменения регулируемой величины при
установившихся значениях;
при этом важно, чтобы значения Хмакс
и
Хмшн
не
выходили
за допустимые пределы. Астатическая
система представляет
собой на графике горизонтальную прямую
2:
при
любой нагрузке
Хуст=Х0.
Однако
надо иметь в виду, что в переходных
процессах
рассогласование у астатических систем
обычно больше,
чем у статических, и процесс дольше 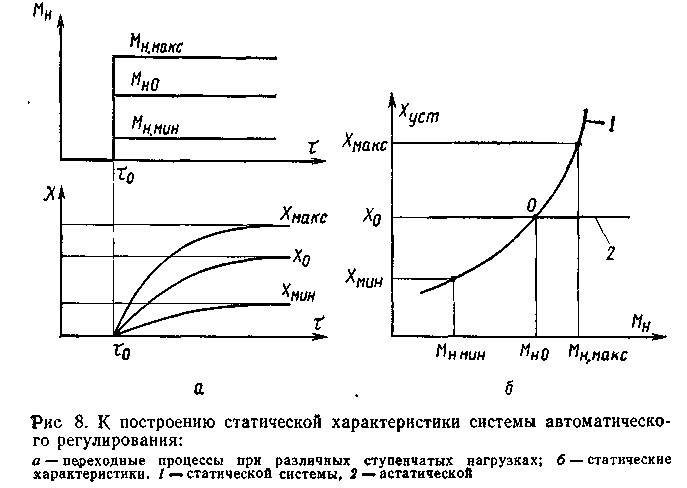 не
затухает (см. рис.
7).
не
затухает (см. рис.
7).
Статическую
характеристику можно получить из
уравнения (2.5),
если принять, что все производные равны
нулю. Поскольку при
![]() как нагрузка, так и регулируемая величина
постоянны,
то скорость их изменения (первая
производная) равна нулю.
Статическую характеристику системы
можно построить и
графически, если известны статические
характеристики объекта
и регулятора.
как нагрузка, так и регулируемая величина
постоянны,
то скорость их изменения (первая
производная) равна нулю.
Статическую характеристику системы
можно построить и
графически, если известны статические
характеристики объекта
и регулятора.
Качество регулирования (Устойчивость. Переходная (динамическая) характеристика системы). Установив основные характеристики автоматических систем регулирования, рассмотрим теперь, по каким показателям можно судить о качестве регулирования.
Свойство системы возвращать регулируемую величину к заданному значению при воздействии импульсной нагрузки называют устойчивостью. Так, температура в холодильной камере, несмотря на периодическое открывание дверей или включение лампочек (импульсная нагрузка), возвращается к начальному значению. Неустойчивая система не может обеспечить регулирование. Большинство систем имеет ограниченную устойчивость, т. е. система устойчива, если нагрузка не выходит за допустимые пределы.
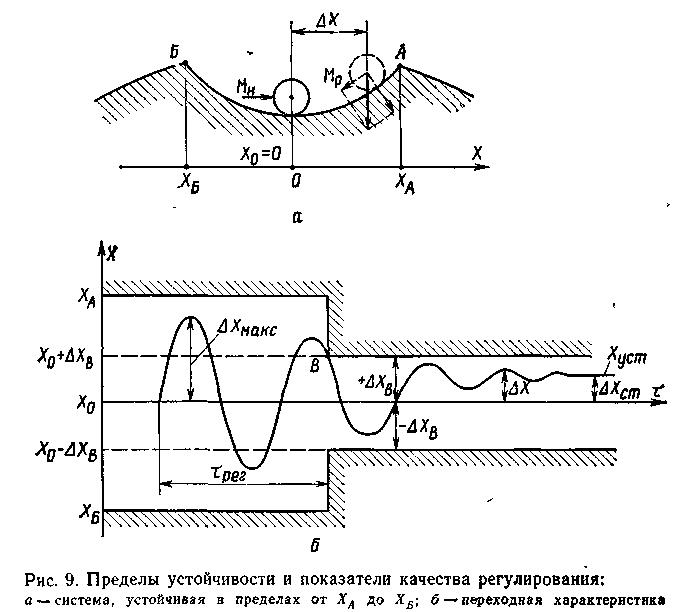
Поясним понятие устойчивости примером из механики (рис. 9,а). Импульсная нагрузка (легкий удар) выведет шарик из состояния равновесия, но под действием тангенциальной составляющей веса шарика Мр он после нескольких колебаний относительно Х0 займет начальное положение. Однако, если нагрузка достигнет значения, при котором отклонение шарика станет больше ХА, то, выйдя из вогнутой поверхности, он будет лишь удаляться от центра. Другими словами, эта система устойчива для нагрузок, не выводящих шарик за пределы точек А и Б. О степени устойчивости системы можно судить по отношению максимальной нагрузки, возникающей при эксплуатации, к нагрузке, выводящей систему из зоны устойчивости, или по отношению соответственных значений Хмакс и Ха.
О качестве регулирования обычно судят по переходной (динамической) характеристике системы (рис. 9,б). Процесс регулирования должен удовлетворять трем главным техническим требованиям:
-
отклонение регулируемой величины ΔХ не должно превышать заданных пределов (±ΔХВ);
-
время регулирования τрег (с момента ступенчатого изменения нагрузки до входа в заданные пределы) не должно быть слишком большим (допустимое время регулирования обычно также указывается в технических условиях);
-
максимальное отклонение регулируемой величины от начального значения ΔХмакс в течение времени регулирования не должно выходить за допустимые пределы ХА и ХБ.
Последнее требование может быть связано с необходимостью обеспечить прочность прибора или аппарата и устойчивость системы, а также с технологическими условиями. Иногда его вообще не оговаривают, тогда наиболее важным является первое требование, т. е. основное значение имеют свойства системы в установившемся состоянии.
Для определения характеристики системы надо знать динамические и статические характеристики объекта и регулятора.