

Avtomatizatsia_lektsii / 2_5
.doc2.5 Основные элементы автоматических регуляторов
Автоматический регулятор, воспринимая изменение регулируемого параметра X, которой для регулятора является входным, определяет рассогласование (X—Х0) и, преобразуя его в выходной параметр Y, соответственно изменяет регулирующее воздействие. Для этого у регулятора имеются следующие основные элементы (рис. 15).
Чувствительный элемент ЧЭ воспринимает изменение регулируемого параметра X и преобразует его в параметр Х1, более удобный для воздействия на другие элементы. В регуляторе температуры, например (рис. 15, б), чувствительным элементом служит термобаллон ЧЭ, заполненный легкокипящей жидкостью. С повышением температуры X часть жидкости в термобаллоне выкипает и давление Х1 на донышко сильфона увеличивается, т. е температура X преобразуется в давление Х1.
Задающее устройство ЗУ устанавливает параметр Х3, соответствующий начальному значению Х0. На рис. 15,б роль ЗУ
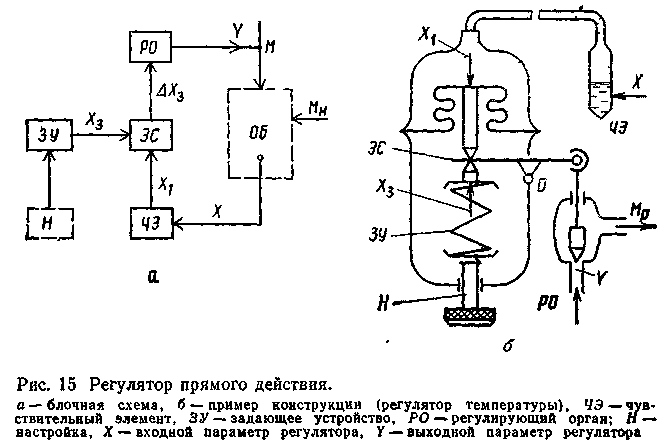
выполняет сжатая пружина. Винт Н (настройка) позволяет изменять силу натяжения пружины Х3.
Элемент сравнения ЭС (называемый иногда сумматором) вырабатывает сигнал ΔХ3 = Х1—X3, соответствующий рассогласованию ΔХ=Х—Х0. На рис. 15,б рычаг ЭС воспринимает разность силы давления Х1 и силы пружины Х3.
Регулирующий орган РО преобразует сигнал элемента сравнения ΔХ3 в выходной параметр регулятора Y, непосредственно изменяющий регулирующее воздействие МP. На рис. 15,б РО представляет собой клапан, который при повышении температуры увеличивает площадь проходного сечения Y и соответственно подачу холодного рассола Мр в объект.
Регуляторы, у которых мощность сигнала рассогласования достаточна для воздействия на регулирующий орган, называют регуляторами прямого действия. В приведенном примере изменение температуры в объекте ΔХ на 2—3°С вызывает необходимое открытие клапана ΔY без постороннего источника энергии
Если мощность сигнала рассогласования недостаточна для воздействия на РО (например, для перемещения большого клапана), то применяют регуляторы непрямого действия (рис. 16). Для перемещения РО у них имеется исполнительный механизм ИМ, использующий внешний источник энергии Е (электроэнергия, сжатый воздух, давление жидкости и др.), а также усилитель.
Усилитель Ус преобразует слабый по мощности сигнал ΔХ3 в мощный сигнал изменения внешней энергии Х2, который приводит в действие исполнительный механизм (электродвигатель, электромагнит и др ). На рис 16, б сигнал элемента сравнения ΔХ3 вызывает замыкание контактов, и возникающий ток Х2 в
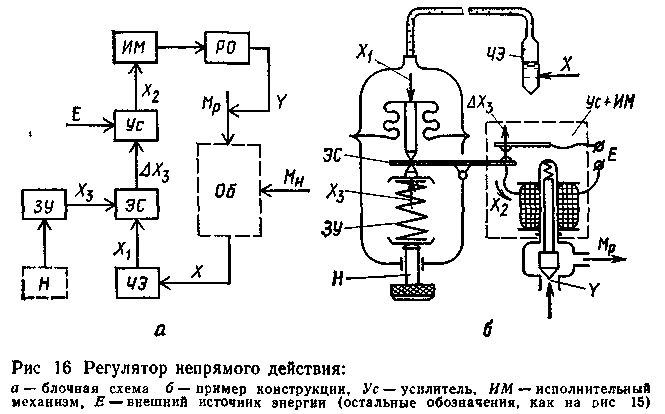
катушке электромагнита ИМ создает силу, открывающую клапан РО.
Наряду с указанными основными элементами регулятор может иметь ряд дополнительных элементов: узлы настройки отдельных параметров регулятора, компенсирующие устройства для уменьшения неточности работы в случае внешних помех, узлы для облегчения сборки и наладки, корректирующие элементы (позволяющие осуществить требуемый закон регулирования, т. е. определенную математическую зависимость выходного параметра регулятора ΔY от изменения на входе ΔХ), элементы преобразования одного параметра в другой (для передачи на расстояние, для удобства воздействия на последующий элемент и т. д.).
Некоторые детали регулятора могут выполнять функции двух и даже трех элементов.
Классификация регуляторов
Автоматические регуляторы можно классифицировать по различным признакам: по конструкции основных элементов, по наличию дополнительных элементов, по количеству и взаимосвязи между выходными и входными параметрами и ряду других признаков.
1. По виду регулируемого параметра различают: регуляторы давления, температуры, уровня жидкости и т. д. Основное различие их в конструкции чувствительного элемента.
2. По числу регулируемых параметров — одноточечные и многоточечные. Последние имеют несколько входов (ЧЭ) и столько же выходов (РО), а также переключатель каналов
(ПК), поочередно соединяющий соответствующие входы и выходы (см. регуляторы типа М4, АМУР-80 в гл. 4).
-
По типу настройки — стабилизирующие, программные, следящие, оптимизирующие.
-
По способу воздействия на объект — регуляторы, подводящие теплоту (нагреватели); регуляторы, отводящие теплоту (холодильные машины, охлаждающие приборы); регуляторы, подводящие в объект газ, жидкость и т. д. Они различаются конструкцией регулирующего органа.
-
По использованию внешнего источника энергии — регуляторы прямого действия и непрямого (см. рис. 15 и 16). Последние по виду энергии, подводимой к исполнительному механизму, делятся на электрические, пневматические, гидравлические и др.
-
По характеру изменения выходного сигнала — регуляторы непрерывного (плавного) действия и дискретные. Последние могут быть дискретными по времени (импульсные) и дискретными по величине выходного сигнала (позиционные).
В регуляторах плавного действия выходной параметр Y (например, степень открытия клапана) в любой момент времени

может занять любое промежуточное значение между двумя крайними (Yмин — клапан закрыт, Yмакс — полностью открыт, рис. 17,а).
В импульсных регуляторах выходной параметр может занять любое положение, но только в определенные промежутки времени (рис. 17,6). В интервалах между импульсами сигнал пропадает.
У позиционных регуляторов (рис. 17,в) выходной параметр У может иметь только два, три или несколько определенных значений (соответственно двух-, трех- и многопозиционные регуляторы).
7. По наличию статической ошибки — статические регуляторы и астатические.
У статических регуляторов (рис. 18) установившееся значение выходного параметра Y однозначно («жестко») определяется значением входного параметра X. При регулировании они неизбежно дают статическую ошибку (см. рис. 7,б и в).
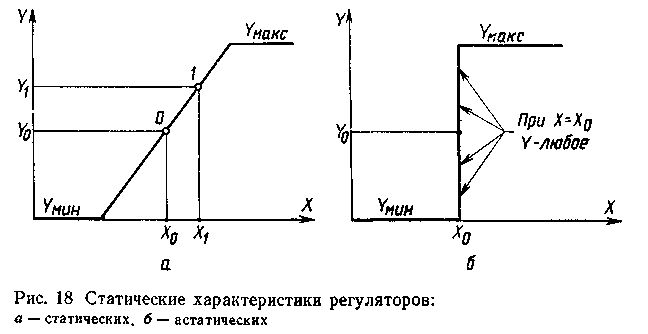
Действительно, пусть при нагрузке Мн0 параметр Х=Х0. Степень открытия клапана согласно статической характеристике Y=Y0, что обеспечивает ΔMp=Mp0=Mн0. При увеличении нагрузки до MН1 установившееся значение наступит только тогда, когда клапан откроется на величину Y1, обеспечивающую воздействие Мр1 равное нагрузке Мн1. А большее открытие клапана согласно характеристике возможно лишь при увеличенном значении параметра, т. е. при Х=Х1. Таким образом, неизбежна статическая ошибка ΔXcт=Х1—Х0. Поэтому эти регуляторы и называют статическими.
У
астатических регуляторов (рис. 18,б)
малейшее отклонение
входного параметра X
от
Х0
вызывает
непрерывное движение
РО
с определенной
скоростью до предельного значения
Yмакс
или Yмин.
Регулирующий орган остановится в
каком-то положении
Y1
только
при Х=Х0,
если
при этом к тому же окажется,
что Мр1
= Мн1.
При нарушении равенства, т. е. при Mp![]() Mн1,
вновь
возникает рассогласование ΔХ
и РО
начинает
перемещаться,
пока не наступит двойное равенство
(Мр=Мн;
Х
= Х0).
В
этом установившемся положении статическая
ошибка X—Х0
равна
нулю. Именно поэтому их и называют
астатическими.
Mн1,
вновь
возникает рассогласование ΔХ
и РО
начинает
перемещаться,
пока не наступит двойное равенство
(Мр=Мн;
Х
= Х0).
В
этом установившемся положении статическая
ошибка X—Х0
равна
нулю. Именно поэтому их и называют
астатическими.
8. По закону регулирования, т. е. по математической зависимости между выходным и входным параметрами, регуляторы плавного действия разделяются на следующие основные виды.
а) Пропорциональные (П-регуляторы) — закон регулирования у них выражается уравнением
y = kx. (2.42)
б) Пропорционально-дифференциальные (ПД-регуляторы), или регуляторы с предварением, с воздействием по производной:
![]() . (2.43)
. (2.43)
в) Интегральные (И-регуляторы):
![]() . (2.44)
. (2.44)
г) Пропорционально-интегральные (ПИ-регуляторы), или изодромные регуляторы:
![]() (2.45)
(2.45)
д) Пропорционально-интегрально-дифференциальные (ПИД-регуляторы), или изодромные с предварением:
![]()
![]() (2.46)
(2.46)
Приведенные в безразмерной форме математические зависимости — основные законы регулирования, характеризующие регуляторы плавного действия, — с известным приближением могут быть отнесены к импульсным и многопозиционным регуляторам. Применяют регуляторы и с более сложными законами регулирования. В действительных регуляторах законы регулирования осуществляются с некоторым приближением. Регуляторы типа И, ПИ, ПИД, имеющие в законе регулирования интегральное выражение, относятся к астатическим; регуляторы типа П и ПД — к статическим, что станет понятным при конкретном рассмотрении основных законов регулирования.
9. По типу функции. Рассмотренные выше виды регуляторов воспроизводят функцию одного переменного. Более сложные регуляторы могут воспроизводить функцию нескольких переменных, и регулирующее воздействие у них направлено на уменьшение рассогласования некоторой функции этих переменных. Простейшим примером таких регуляторов может служить регулятор разности давлений (температур). Он имеет два чувствительных элемента и дополнительный сумматор, сравнивающий эти два входных параметра.