

Строительная механика / Учебник СМ Саргсян / П22-13
.DOC Значение
силы РДОП,
при которой в наиболее опасной точке
балки напряжение достигает предела
текучести, и может быть установлено
из равенства наибольшего момента,
действующего в опасном сечении,
допускаемому:
![]() .
Откуда, получим:
.
Откуда, получим:
 .
.
Если балка имеет прямоугольное поперечное сечение, то
![]() ,
,
и, следовательно,
 . (9.15)
. (9.15)
Рис. 9.7
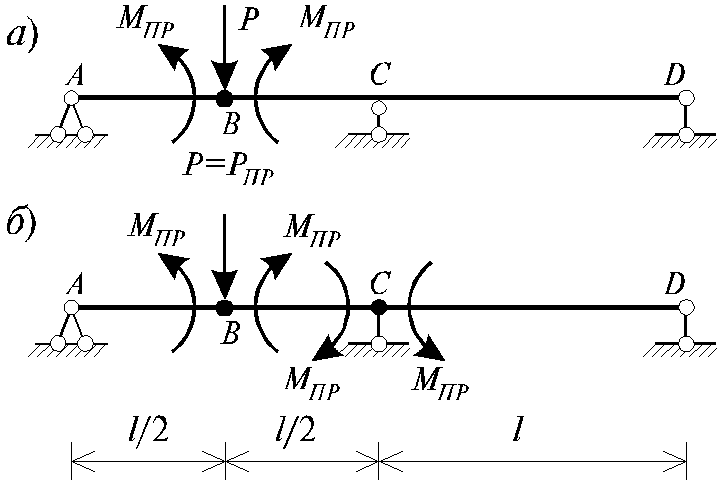
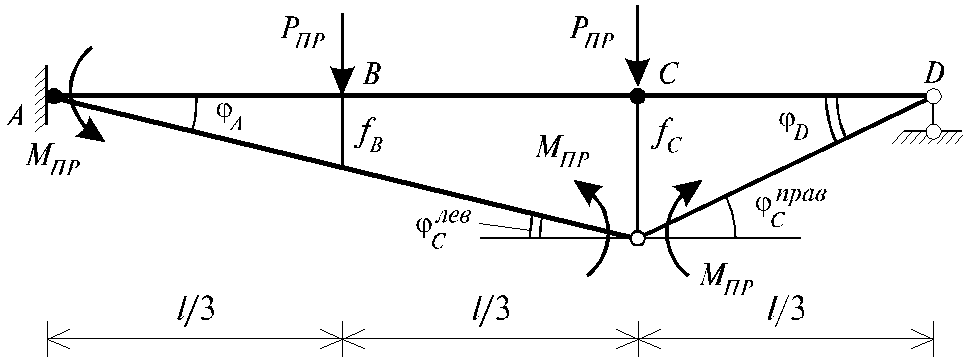
При дальнейшем росте силы Р изгибающие моменты в сечении В и на участке АВ не возрастают, а изгибающие моменты на участке ВСD, с ростом величины силы Р, растут. При указанных предположениях, наибольшая величина изгибающего момента формируется в сечении С, где он раньше всего и достигает предельной величины МПР .
Когда в сечении С изгибающий момент достигнет предельной величины МПР , т.е. когда в этом сечении сформируется пластический шарнир, несущая способность балки исчерпается, вследствие чего, балка превращается в геометрически изменяемую систему.
Согласно статическому способу, и учитывая, что наиболее вероятная схема разрушения конструкции очевидна и изображена на рис. 9.7, б, величина предельной силы определяется из уравнений равновесия и условий равенства изгибающего момента в сечениях пластического шарнира предельному моменту МПР :
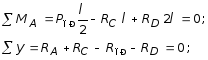
Решая совместно последнюю систему уравнений, получим:
 , (9.16)
, (9.16)
откуда:
 . (9.17)
. (9.17)
При расчете по методу допускаемых напряжений расчетная величина допускаемой силы определяется:
 , (9.18)
, (9.18)
где n - коэффициент запаса по несущей способности конструкции.
В случае расчета по методу предельных состояний, величина допускаемой силы, принимает значение:
 . (9.19)
. (9.19)
Сопоставляя
выражения (9.18) и (9.19), получим, что метод
расчета по предельному состоянию
дает величину допускаемой силы в
![]() раза больше, чем метод расчета по
допускаемым напряжениям, при условии,
что коэффициент запаса в обоих методах
принят одинаковым.
раза больше, чем метод расчета по
допускаемым напряжениям, при условии,
что коэффициент запаса в обоих методах
принят одинаковым.
Рис. 9.8
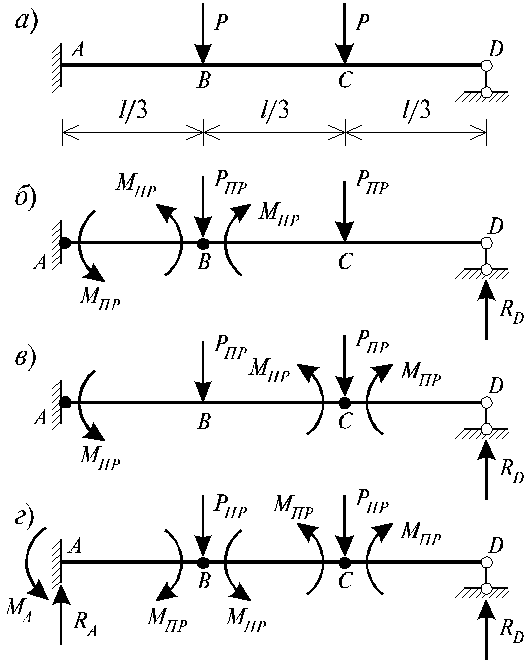
Определим величину предельной силы кинематическим способом, предложенным А.А. Гвоздевым.
Рассматриваемая балка, один раз статически неопределима и, следовательно, ее несущая способность исчерпается в случае образования двух пластических шарниров.
Пластические шарниры могут формироваться в сечениях А, В и С.
Для определения предельной нагрузки по кинематическому способу А.А. Гвоздева необходимо рассмотреть различные сочетания образования пластических шарниров в двух сечениях из трех. Число таких комбинаций равно трем, т.е. числу сочетаний из трех пластических шарниров по два.
Для различных вариантов расположения пластических шарниров составляются уравнения равновесия, при условии равенства изгибающего момента в сечениях пластического шарнира предельному моменту МПР . Из полученных уравнений могут быть определены величины предельных нагрузок. Действительной предельной нагрузкой будет наименьшая из вычисленных для различных сочетаний пластических шарниров.
Необходимо заметить, что при составлении уравнений предельного равновесия системы, можно использовать из трех уравнений статического равновесия всей системы в целом, только два из них. Третье уравнение автоматически будет удовлетворяться. Недостающие уравнения могут быть получены, из рассмотрения равновесия отсеченной части системы, предполагая, что рассматриваемое сечение проходит через пластический шарнир.
Рассмотрим различные возможные схемы предельной стадии работы конструкции.
Первая схема, предполагая, что пластические шарниры формируются в сечениях А и В (рис. 9.8, б):
откуда
![]() . (9.20)
. (9.20)
Вторая схема, предполагая, что пластические шарниры формируются в сечениях А и С (рис. 9.8, в):
откуда
![]() (9.21)
(9.21)
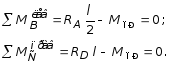
Третья схема, предполагая, что пластические шарниры формируются в сечениях В и С (рис. 9.8, г):

откуда, решая совместно эту систему уравнений, получим значения изгибающего момента в заделке МА и значение предельной нагрузки PПР:
 (9.22)
(9.22)
Так
как условие
![]() не может быть реализовано, то третью
схему следует исключить из дальнейшего
рассмотрения.
не может быть реализовано, то третью
схему следует исключить из дальнейшего
рассмотрения.
Сопоставляя предельные значения внешней силы, приведенные в (9.20)-(9.21), определяем, что наименьшая предельная нагрузка имеет место при второй схеме предельного равновесия, т.е. когда пластические шарниры формируются в сечениях А и С:
Рис. 9.9
![]() .
.
Далее рассмотрим применение кинематического способа - метода предельных состояний для определения величин продольных сил. Действительная схема разрушения системы показана на (рис. 9.9). Составим уравнения работ всех внутренних и внешних усилий на возможных перемещениях:
![]() . (9.23)
. (9.23)
Составляя уравнения совместности, получим:
 (9.24)
(9.24)
Уравнение (9.23), с учетом (9.24), примет вид:

откуда:
![]() . (9.25)
. (9.25)
Сопоставляя выражения (9.25) и (9.21), заметим, что кинематический и статический способы дали идентичные результаты по значению предельной силы.