

Мат Моделирование 2002 (ЛисовЕЦ) / Курсовые / курсовая llama / GMSK
.docМосковский государственный институт электронной техники
(технический университет)
Кафедра высшей математики-1
Доклад
по курсу «Математическое моделирование»
Исследование математической модели
GMSK-радиомодема
Выполнил:
Д.М.Коплович, МП-38
Москва, 2002 г.
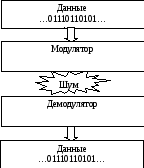
Основные принципы работы радиомодема
Модуляцией сигнала называют его представление в виде, удобном для передачи на расстояние. Существуют различные виды модуляций для передачи по проводам в виде прямоугольных импульсов (NRZ, NRZI, 2B1Q, манчестерский код), а также для передачи через радиоэфир, например, частотная, амплитудная и фазовая модуляции. Такое разделение существует из-за того, что прямоугольные импульсы неудобно передавать радиоволнами (они имеют слишком широкий спектр, сильно загружая частотный диапазон). Поэтому в беспроводных системах используют модуляцию с узким спектром сигнала. Естественное требование к любой системе передачи даных – высокая скорость работы. Другими требованиями, предъявляемыми к беспроводным системам, являются помехоустойчивость и самосинхронизация.
В данной работе рассмотрена математическая модель радиомодема с высокой надежностью и хорошей самосинхронизацией сигнала. Разумеется, при этом пришлось пожертвовать высокой скоростью работы, но техническое задание к проекту ее и не требовало.
Система прошла тестирование в реальных условиях на мобильной военной радиостанции, разработанной фирмой NeLS. Оно показало состоятельность данной модели.
Классическая FSK-модуляция предполагает наличие двух несущих частот, одной из которых кодируется 0, а другой 1:
![]()
Она является самосинхронизирующейся, но не помехоустойчивой. Уже слабое зашумление сигнала вызывает большое количество ошибок при демодуляции. Но даже 5% ошибок - недопустимо много для протокола физического уровня, т.е. модема. Кроме того, излом формы сигнала в момент смены несущей частоты дает дополнительное расширение его спектра.

Рисунок 1. Пример классической FSK-модуляции. Сначала передается последовательность единиц (частота f), затем последовательность нулей (частота 2f), а затем опять единиц.
Фазы
![]() и
и
![]() -
некогерентные, поэтому такой вид
модуляции называется модуляцией с
разрывной фазой. Она применяется в
системах с низкой скоростью передачи
данных, в которых ширина полосы пропускания
неважна.
-
некогерентные, поэтому такой вид
модуляции называется модуляцией с
разрывной фазой. Она применяется в
системах с низкой скоростью передачи
данных, в которых ширина полосы пропускания
неважна.
Другой способ фазовой модуляции – применение генератора частоты, управляемого напряжением, т.е. частотного модулятора. Изменение выдаваемой им частоты пропорционально амплитуде модулируемого сигнала m(t), а фаза выходного сигнала пропорциональна интегралу входного сигнала по времени.
![]() (1),
(1),
где
![]() ,
,
e(t) – модулированная несущая,
AC – амплитуда немодулированной несущей,
![]() - угловая частота немодулированной
несущей,
- угловая частота немодулированной
несущей,
![]() - начальная фаза,
- начальная фаза,
![]() - мгновенное значение фазы, возникающее
при воздействии модулирующего сигнала
m(t).
- мгновенное значение фазы, возникающее
при воздействии модулирующего сигнала
m(t).
Переписав уравнение (1) с учетом зависимости фазы выходного сигнала от амплитуды входного, получим уравнение для непрерывной фазовой модуляции:
![]() (2)
(2)
Т.к.
![]() (3), то в случае двоичной логики (
(3), то в случае двоичной логики (![]() ):
):
![]() (4),
(4),
где
![]() ,
r(t)
– прямоугольный импульс с амплитудой
1/(2T) и
длительностью T.
,
r(t)
– прямоугольный импульс с амплитудой
1/(2T) и
длительностью T.
Подставив (4) в (3), получим:
![]() (5)
(5)
На промежутке
![]()
![]() (6)
(6)
С помощью уравнения (6) уравнение (2) может быть записано в виде
![]() . (7)
. (7)
При этом
![]() ,
а
,
а
![]() находится из фазы
находится из фазы
![]() .
Таким образом, если модулирующий двоичный
сигнал не имеет всплесков, то модулированный
сигнал e(t)
имеет непрерывную фазу.
.
Таким образом, если модулирующий двоичный
сигнал не имеет всплесков, то модулированный
сигнал e(t)
имеет непрерывную фазу.
Константа K зависит от пикового отклонения частоты генератора, причем
![]()
Здесь
![]() ,
,
T – период передачи одного бита,
f1, f2 – логические ноль и единица соответственно.
Для MSK fdT = 0.5, поэтому (7) запишется как
![]() . (7*)
. (7*)
Отсюда, при
![]() ,
частота несущей сдвигается выше:
,
частота несущей сдвигается выше:
![]() . (8)
. (8)
При
![]()
![]() . (9)
. (9)
Вычитая (9) из (8), получаем:
![]() (10).
(10).
Уравнение (10) утверждает, что для h=fdT=0.5 разница в частоте между f1 и f2 равна половине скорости передачи данных.
При условии
![]() ,
где
,
где
![]() ,
k – целое,
,
k – целое,
частоты f1 и f2 будут ортогональны. Это необходимо для корректной демодуляции сигнала (см.[2]).
На самом деле уравнение (10) выражает «минимальную» разницу в частотах между f1 и f2, поэтому модуляция и называется Minimum Shift Keying, минимальный фазовый сдвиг.
В рассматриваемой модели используется GMSK-модуляция (Gaussian MSK). Гауссовой она называется из-за того, что сигнал перед демодуляцией пропускается через фильтр нижних частот с гауссовой импульсной характеристикой.
Характеристики модуляции:

Здесь
![]() -
частота дискретизации выходного ЦАП
модулятора, V – скорость
модема. Таким образом, на один передаваемый
бит приходится 9 сэмплов. Это необходимо
для реализации высокой помехоустойчивости.
-
частота дискретизации выходного ЦАП
модулятора, V – скорость
модема. Таким образом, на один передаваемый
бит приходится 9 сэмплов. Это необходимо
для реализации высокой помехоустойчивости.
Пример модулированного пакета данных приведен на Рис.2.

Рисунок 2.GMSK-модуляция пакета данных AA00AAC4D789, или
101010100000000010101010110001001101011110001001 в двоичной системе.
Рассмотрим алгоритм работы математической модели модема подробнее.
1 .
Модулятор
.
Модулятор
Модуляция входных данных производится по предопределенной таблице сэмплов в зависимости от поступившей пары бит 00, 01, 10 или 11, и настолько проста, что рассматривать алгоритм ее реализации не имеет смысла.
2. Имитация зашумленного канала радиосвязи.
На выходной сигнал модулятора накладывается белый шум различной мощности. При изменении уровня SNR (Signal-to-Noise Ratio) исследовалась помехоустойчивость модема, способность обнаруживать несущую (это важно, т.к. данные передаются пакетами и не пойманная вовремя несущая приводит к потере всего пакета, что сильно уменьшает скорость), а также свойство самосинхронизации, которым обладают все FSK-модемы. После наложения шума сигнал дополнительно ослаблялся в 10 раз и подавался на вход демодулятора.
2. Демодулятор
В процессе работы над проектом были созданы два варианта демодулятора, использующие один и тот же общий принцип, но с небольшими модификациями в алгоритмах поиска заголовка пакета.
Демодулятор выполняет следующие функции:
1) Поиск заголовка пакета.
2) Самостоятельная синхронизация по принятому сигналу.
3) Декодирование данных.
4) Служебные функции интерфейса с вышележащим уровнем сетевого протокола.
В начальном состоянии модем «прослушивает» эфир, т.е. пытается декодировать все данные, которые поступают на его вход с ЦАП радиотракта. Декодированные данные поступают в циклический буфер, где происходит проверка на наличие заголовка пакета данных. Если заголовок не найден, то в следующем такте часть данных в буфере замещается новыми. При обнаружении заголовка все декодированные далее данные начинают складываться из битов в байты, а байты – в специальный буфер, из которого их может забирать вышележащий уровень сетевого протокола. Так продолжается либо до переполнения буфера, либо до перезапуска модема.
Декодирование происходит следующим образом. Суммируются 9 последних поступивших на вход сэмплов, это равносильно дискретному интегрированию входящего сигнала. При интегрировании белый шум частично компенсируется, а сигнал с амплитудой одного знака складывается (Рис.3).
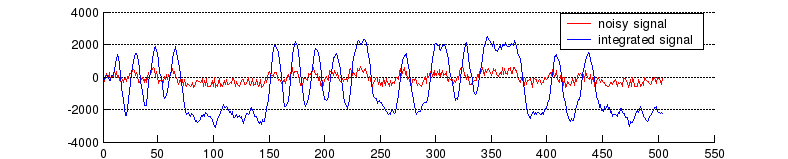
Рисунок 3. Сигнал так сильно зашумлен, что без интегрирования невозможно получить из него данные.
После этой процедуры можно считывать знаки интегральной функции в ее максимумах и минимумах каждые 9 сэмплов. Если функция положительна, то текущий бит декодируется как 1, если отрицательна – то 0.
Для выбора одной из девяти точек, в которых можно измерять знак интеграла, использовалось свойство самосинхронизации.
Вариант I [первоначальный]. Перед передачей заголовка каждого пакета модулятор всегда должен был передавать синхрослово 1010101010101010 (половину его можно увидеть на Рис.2 слева).
Каждый раз в момент перехода интегральной функции через 0 демодулятор фиксировал номер сэмпла, на котором произошел переход, и в соответствии с ним корректировал синхронизацию (здесь использовался тот факт, что такой переход мог происходить только с частотой кратной 9). Начальное синхрослово необходимо, чтобы к началу приема заголовка пакета демодулятор уже был настроен на экстремумы интегральной функции.
Вариант II [окончательный]. Декодирование велось по всем сэмплам, т.е. данные декодировались одновременно в 9 буферов, каждый с задержкой в 1 сэмпл относительно предыдущего. Одновременно для каждого буфера велся учет параметра среднеквадратичного качества сигнала, довольно медленно меняющегося со временем. Выбирался буфер с наилучшим качеством сигнала.
Введение такого алгоритма позволило значительно улучшить качество декодирования данных (см. Рис.4).
Оба варианта были реализованы на C (модель) и ассемблере для DSP TMS320C5510 (Texas Instruments) и испытаны в реальных условиях, причем результаты находились почти в полном согласии с теорией. Это «почти» объясняется неточностью измерения отношения сигнал-шум в реальном опыте и неидеальным компьютерным генератором псевдослучайных чисел. Кроме того, на скорость передачи данных влияют импульсные шумы, неустранимые программным путем.


Рисунок 4. Зависимость количества верно декодированных пакетов (из 1000) от зашумленности канала для двух вариантов демодулятора: а) поиск синхронизации, б) поиск синхронизации + передача 1 байта данных.
Литература.
[1] www.mxcom.com.
[2] E.A.Lee, D.G.Messerschmitt, Digital Communications, Kluwer Academic Publishers, Boston, MA,1988.