

1)Способы управления удаленными объектами
Телемеханика – это отрасль науки и техники, охватывающая теорию и технические
средства контроля и управления объектами на расстоянии с применением специальных
преобразований
сигналов для эффективного использования
каналов связи. 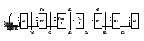
Cпособы управления объектами в зависимости от степени удаления объектов
от пункта управления:
1. местный;
2. дистанционный;
3. телемеханический.
Схемы местного способа управления

ПУ - пункт управления,
КП - контролируемый пункт,
УО - управляемые объекты,
ЛС – линия связи.
S1-S3 – ключи (органы управления);
Д1-Д3 - электродвигатели (управляемые объекты);
ЛБ - линейная батарея.
Местный способ управления называется прямопроводным управлением.
Достоинства местного способа:
простота,
отсутствие какой-либо дополнительной аппаратуры,
высокая надежность по передаче информации,
- высокая помехоустойчивость.
Недостатки местного способа:
– невысокая дальность управления из-за потерь энергии в линии связи;
многоканальность (многопроводность).
Для N объектов, требуется N + 1 провод (один провод обратный).
Местный способ применяют на небольших расстояниях (десятки, сотни метров)
при небольшом числе объектов (десятки объектов).
В ж.д. автоматике местный способ управления применяют в системах
электрический централизации (ЭЦ) с центральным питанием.
Схемы дистанционного способа управления

Центральный источник энергии (ЛБ) используется для питания промежуточных реле,
а управляемые объекты (двигатели) имеют местное питание
от местного источника энергии (МБ).
При дистанционном способе управления
по линии связи передается информация о том, какой объект надо включить,
а не энергия включения этого объекта.
Недостатком данного способа является многоканальность схемы управления
Дистанционный способ применяют на средних расстояниях (сотни метров, километры)
при небольшом числе объектов (десятки объектов).
Структурная схема электрической централизации с местным питанием
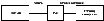
Структурная схема телемеханического способа управления
ОУ - органы управления;
ПС - первичный сигнал;
КУ - кодирующее устройство;
ПерУ - передающее устройство;
КС - кодированный сигнал;
ЛС - линейный сигнал;
ПрУ - приемное устройство;
СУ - сигнал управления;
ДУ - декодирующее устройство;
ДС - декодированный сигнал;
ВП - выходные преобразователи;
УО - управляемые объекты.
2)Виды телемеханических систем
Телемеханическая система – совокупность устройств пунктов управления
и контролируемых пунктов, периферийного оборудования, необходимых линий
и каналов связи, предназначенных для совместного выполнения
телемеханических функций.
1.Дискретные телемеханические системы.
Применяют если управляемые объекты являются дискретными,
т.е. имеют конечное множество состояний.
Наиболее распространены двухпозиционные объекты, имеющие два состояния:
включено и выключено (стрелочные электроприводы, светофоры, рельсовые цепи и др.).
2.Непрерывные телемеханические системы.
Применяют, если состояние объектов управления изменяется непрерывно
(напряжение генератора, температура в электропечи, уровень воды в шлюзе и др.).
Телемеханические функции включают в себя:
телеуправление,
телесигнализацию
и телеизмерение.
Система телеуправления (ТУ) служит для управления положением
или состоянием дискретных и непрерывных объектов.
Управление разделяется на:
двухпозиционное,
– многопозиционное;
- телерегулирование с непрерывным множеством состояний (ТР).
Система телесигнализации (ТС) осуществляет получение информации
о состоянии контролируемых и управляемых объектов.
Имеет структуру, аналогичную структуре системы ТУ.
ТУ–ТС - дискретная система, выполняющая функции телеуправления и телесигнализации
одного и того же множества объектов (диспетчерская централизация - ДЦ).
Система телеизмерения (ТИ) осуществляет получение информации о значениях
измеряемых параметров контролируемых или управляемых объектов.
Структурные схемы телемеханических сетей

