

физика, механіка, 1 семестр / ЛАБОРАТОРНАЯ РАБОТА №3
.pdfМинистерство образования Республики Беларусь
Учреждение образования «Могилевский государственный университет продовольствия»
Кафедра физики
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ И ПРОВЕРКА ТЕОРЕМЫ ШТЕЙНЕРА С ПОМОЩЬЮ ТРИФИЛЯРНОГО ПОДВЕСА
Методические указания к лабораторной работе № 3 по разделу "Механика и молекулярная физика" курса общей физики
для студентов всех специальностей дневной и заочной формы обучения
Могилев 2011
1

УДК 532.516
Рассмотрены и рекомендованы к изданию
на заседании кафедры физики Протокол № 9 от 12 мая 2011 г.
Составители старший преподаватель Светлова Т.В.,
ассистент Пусовская Т.И.
Рецензент кандидат физико математических наук, доцент УО МГУП
В.Л.Малышев.
УДК 532.516 ©Учреждение образования «Могилевский государственный университет продовольствия», 2011
2
ЛАБОРАТОРНАЯ РАБОТА № 3
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ И ПРОВЕРКА ТЕОРЕМЫ ШТЕЙНЕРА С ПОМОЩЬЮ ТРИФИЛЯРНОГО ПОДВЕСА
ЦЕЛЬ РАБОТЫ: изучение вращательного движения твердого тела, определение моментов инерции подвеса, цилиндра и проверка на опыте теоремы Штейнера.
ПРИБОРЫ И ПРИНАДЛЕЖНОСТИ: трифилярный подвес, секундомер, линейка, набор грузов.
1 ТЕОРЕТИЧЕСКОЕ ВВЕДЕНИЕ
1.1 Вращательное движение. Момент силы
Вращательное движение – это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.
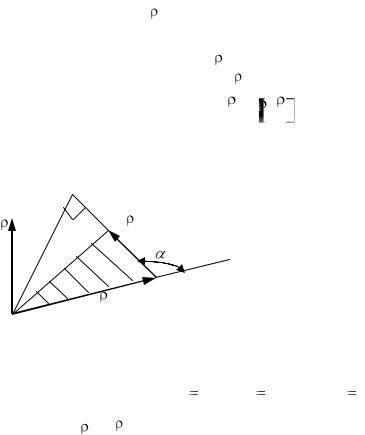
Моментом силы F относительно неподвижной точки О
называется векторная физическая величина, определяемая векторным произведением радиуса-вектора r , проведенного из точки О в точку приложения силы А, на вектор силы F .
M  r , F .
r , F .
Направление момента силы определяется по правилу правого винта.
В
M |
l |
F |
|
||
|
|
А r
О
Рисунок 1 – Направление момента силы
Модуль момента силы M Fr sin  Fl , где l r sin
Fl , где l r sin  - плечо силы – кратчайшее расстояние между линией действия силы и точкой О;
- плечо силы – кратчайшее расстояние между линией действия силы и точкой О;  - угол между векторами r и F .
- угол между векторами r и F .
3
Моментом силы относительно неподвижной оси z называется скалярная величина Мz, равная проекции на эту ось вектора M момента
силы, определенного относительно произвольной точки О данной оси z. Значение момента не зависит от выбора положения точки О на оси z.
1.2 Момент инерции
Моментом инерции материальной точки относительно оси вращения называется скалярная величина равная произведению массы этой точки на квадрат расстояния до оси
J mr 2 .
Момент инерции подобно массе при поступательном движении является мерой инертности.
Моментом инерции системы материальных точек (тела)
относительно оси вращения называется физическая величина, равная сумме произведений масс n материальных точек системы на квадраты их расстояний до рассматриваемой оси
|
n |
J |
m r 2 . |
|
i i |
|
i 1 |
В случае непрерывного распределения масс (при определении момента инерции однородного твердого тела) эта сумма сводится к интегралу
m
J  r 2 dm, где интегрирование производится по объему тела.
r 2 dm, где интегрирование производится по объему тела.
0
m |
|
|
|
|
J |
r 2 dm |
r 2 d ( V ) |
r 2 dV |
r 2 dV . |
0 |
V |
V |
|
V |
Главный момент инерции – момент инерции относительно главной оси, проходящей через центр масс.
Момент инерции тела зависит от того, относительно какой оси оно вращается и как распределена масса по объему.
Если известен момент инерции тела относительно оси, проходящей через его центр масс, то момент инерции относительно любой другой параллельной оси определяется теоремой Штейнера.
1.3Теорема Штейнера
Теорема Штейнера. Момент инерции тела J относительно произвольной оси вращения равен сумме момента его инерции Jc относительно оси, параллельной данной и проходящей через центр масс С тела, и произведения массы тела m на квадрат расстояния а между осями.
J J c ma 2 .
4
A
|
R1 |
|
R2 |
|
a |
|
h |
m1 |
C |
|
m2 |
|
|||
|
|
||
r1 |
x |
|
r2 |
|
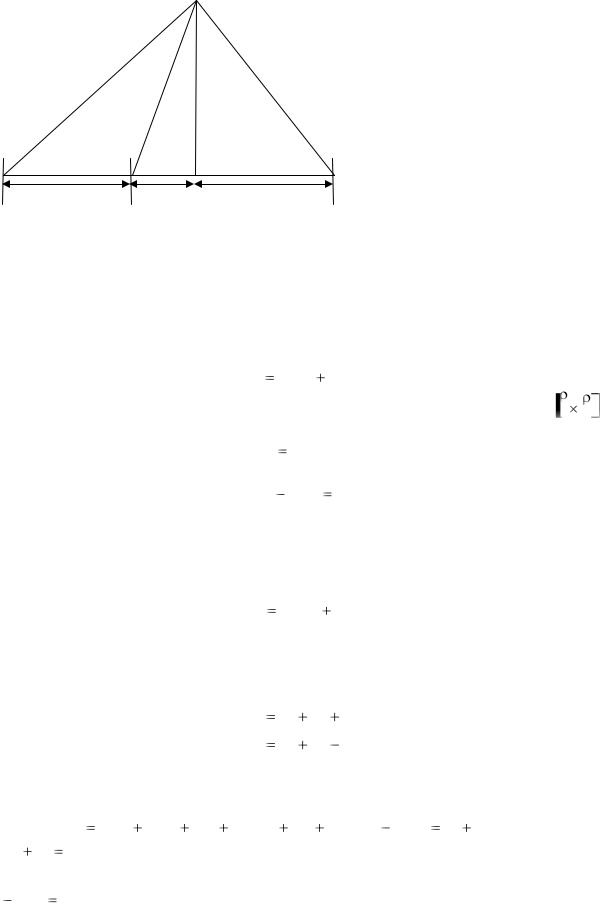
Рисунок 2 − Система, состоящая из двух материальных точек
Рассмотрим систему, состоящую из двух материальных точек массами m1 и m2 (рисунок 2). Рассчитаем момент инерции этой системы, относительно оси проходящей через центр масс, расположенной нормально к плоскости чертежа.
J |
c |
m r 2 |
m r 2 |
(1) |
|
1 1 |
2 2 |
||
|
|
|
|
|
Определим центр масс С этой |
системы. Моменты сил F r |
|||
материальных точек m1 и m2 относительно С должны быть равны |
|
|||
m1 gr1 |
m2 gr2 |
|
||
Следовательно |
|
|
|
|
m1 r1 |
m2 r2 |
0 |
(2) |
|
|
|
|
|
|
Определим момент инерции этой системы относительно любой другой оси (в частности, оси, проходящей через точку А), параллельной оси, проходящей через центр масс С.
Момент инерции относительно оси, проходящей через точку А
J |
m R 2 |
m R |
2 |
А |
1 1 |
2 2 |
(3) |
|
Момент инерции относительно оси, проходящей через точку С определяется по формуле 1.
Используя рисунок и теорему Пифагора, получим:
R12 |
h2 |
(r1 |
x)2 |
(4) |
R22 |
h2 |
(r2 |
x)2 |
(5) |
Подставив полученные выражения (4),(5) в (1), получим
|
J |
A |
m r2 |
m r2 |
(m m )(h2 |
x2 ) 2x(m r m r ) |
J |
c |
ma2 |
||||||
|
|
|
|
1 1 |
2 |
2 |
1 |
2 |
1 1 |
2 |
2 |
|
|
||
т.к. h2 x2 |
a2 , |
|
|
|
|
|
|
|
|
|
|
|
|
||
для центра масс |
|
|
|
|
|
|
|
|
|
|
|
||||
m1r1 m2 r2 |
0 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
где m1+m2 |
− масса всей системы. |
|
|
|
|
|
|
|||||||||||
R2 |
|
h2 |
r2 |
2r x |
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
h2 |
r2 |
2r x |
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
A |
m h2 |
m r2 |
2m r x m x2 |
|
m h2 |
m r2 |
2m r x m x2 |
||||||||||
|
|
1 |
|
1 1 |
1 1 |
|
1 |
|
|
2 |
2 |
2 |
|
2 |
2 |
|
2 |
|
|
m (h2 |
x2 ) m (h2 x2 ) (m r2 |
m r2 ) 2x(m r m r ) |
|||||||||||||||
|
|
1 |
|
|
2 |
|
|
|
1 |
1 |
2 |
2 |
|
1 |
1 |
|
2 |
2 |
|
J |
C |
(m m )(h2 |
x2 ) |
J |
C |
ma2 |
|
|
|
|
|
|
|
||||
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
Для центра тяжести m1 gr1 |
|
m2 gr2 |
m1 r1 |
m2 r2 |
|
0 |
|
|||||||||||
|
|
|
Таким образом, получили |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
J c |
ma 2 |
|
||
1.4 Кинетическая энергия
Абсолютно твердое тело вращается около неподвижной оси z проходящей через него. Все точки движутся с одинаковой угловой скоростью  сonst . Кинетическая энергия тела
сonst . Кинетическая энергия тела
|
n |
m |
2 |
n m |
( r ) 2 |
|
2 n |
m r 2 |
J |
z |
2 |
|
||
K |
|
|
i i |
|
i |
i |
|
|
|
|
|
, |
||
вр |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
2 |
|
|
2 |
|
2 i 1 |
i i |
|
|
2 |
|
||
|
i 1 |
|
i 1 |
|
|
|
|
|
||||||
где J z - момент инерции тела относительно оси z.
Если тело совершает поступательное и вращательное движения одновременно, то его полная кинетическая энергия равна сумме кинетических энергий.
K |
m 2 |
|
J z |
2 |
. |
2 |
2 |
|
|||
|
|
|
|||
1.5 Основное уравнение динамики вращательного движения твердого тела
При повороте тела под действием силы F |
на бесконечно малый угол |
||||||||
d точка приложения силы А проходит путь dS |
|
rd и работа равна |
|||||||
dA |
F sin |
|
rd |
M z d . |
|||||
Работа вращения идет на увеличение его кинетической энергии |
|||||||||
dA dK d(J |
z |
2 / 2) J |
z |
d . |
|||||
|
|
|
|
|
|
|
|
||
Тогда M z d J z d , или |
M z |
d |
|
J z |
d |
, |
|
откуда следует уравнение |
|
|
|
|
|
|
|||||
dt |
|
dt |
|
||||||
|
|
|
|
|
|
|
|||
динамики вращательного движения твердого тела |
|||||||||
|
|
M z |
|
J z . |
|
|
|
||
Если ось вращения совпадает с главной осью инерции, проходящей через центр масс, то имеет место векторное равенство
6
M z J ,
где J – главный момент инерции тела (момент инерции относительно главной оси).
1.6 Момент импульса и закон его сохранения
Моментом импульса материальной точки А относительно неподвижной точки О называется векторная физическая величина, определяемая векторным произведением L  r , p
r , p r , m .
r , m .
Моментом импульса относительно неподвижной оси z называется скалярная величина Lz, равная проекции на эту ось вектора момента импульса, определенного относительно произвольной точки О данной оси.
Значение момента импульса не зависит от положения точки О на оси z.
При вращении абсолютно твердого тела вокруг неподвижной оси каждая точка тела движется по окружности постоянного радиуса ri со
скоростью |
i |
перпендикулярной радиусу. Момент импульса отдельной |
|
|
|
частицы равен |
Liz mi i ri и направлен по оси в сторону, определяемую |
|
правилом правого винта (совпадает с направлением вектора угловой скорости ).
Момент импульса твердого тела относительно оси есть сумма моментов импульса отдельных частиц:
|
|
|
n |
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
L |
z |
|
m |
i |
r |
|
m |
i |
i |
r 2 |
J |
z |
. |
|
|
||
|
|
|
|
i i |
|
|
|
i |
|
|
|
|
|||||
|
|
i 1 |
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
||
Продифференцируем по времени |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
dLz |
|
|
J z |
d |
J z |
|
|
M z . |
|
|
|
|
|||
|
|
dt |
|
dt |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
В векторной форме M |
|
dL |
|
L |
- еще одна форма записи уравнения |
||||||||||||
|
|
|
|
||||||||||||||
|
dt |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
динамики вращательного движения твердого тела. |
|
|
|
|
|||||||||||||
В замкнутой системе момент всех сил M |
|
|
0 , следовательно, и |
dL |
0 . |
||||||||||||
|
|
dt |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Закон сохранения момента импульса: момент импульса замкнутой |
|||||||||||||||||
системы сохраняется, т.е. не изменяется с течением времени. |
|
|
|||||||||||||||
При равномерном вращении твердого тела относительно некоторой оси |
|||||||||||||||||
z закон сохранения момента импульса L const |
равносилен: |
|
|
||||||||||||||
|
|
|
|
|
|
J z |
|
const . |
|
|
|
|
|
|
|
||
7
2 ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ И ВЫВОД
РАБОЧЕЙ ФОРМУЛЫ
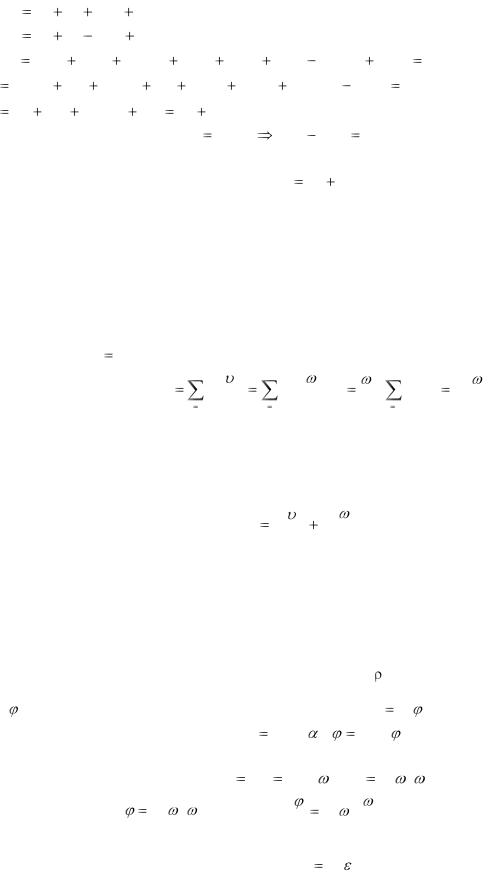
Трифилярный подвес состоит из диска массой m, радиуса R, подвешенного на трех симметрично расположенных нитях. Наверху эти нити симметрично закреплены по краям диска меньшего радиуса r. Диск радиуса R является платформой, на которую можно помещать тела для определения их момента инерции.
r
l
m R
Рисунок 3 – Трифилярный подвес
С помощью трифилярного подвеса методом крутильных колебаний могут быть измерены моменты инерции I различных тел.
Подвес может совершать крутильные колебания относительно оси, проходящей через центр тяжести диска перпендикулярно к его плоскости.
r r
h1 |
l |
h2 |
l |
|
|
|
|
B α
A  R
R
R |
h |
А
а) |
б) |
Рисунок 4 – Схема прибора для определения момента инерции при помощи трифилярного подвеса:
а – до закручивания; б – после закручивания
8
При повороте нижнего диска относительно верхнего на небольшой угол α (5-8о) все нити принимают наклонное положение, и центр тяжести системы при этом поднимается на высоту h h1 h2 . Если диск отпустить, он
начнет совершать крутильные гармонические колебания, период которых зависит от момента инерции диска.
При этом потенциальная энергия диска
En mgh
будет переходить в кинетическую энергию
Ek |
1 |
I |
2 |
|
2 |
|
|
||
|
|
|
|
|
где I - момент инерции диска, кг∙м2; m – масса диска, кг;
- угловая скорость вращательного движения, рад/с;
h - высота поднятия центра тяжести при отклонении от положения равновесия, м;
g– ускорение свободного падения, м/с2.
Вмомент прохождения через положение равновесия вся потенциальная энергия перейдет в кинетическую энергию вращения диска. При этом кинетическая энергия диска и угловая скорость будут максимальными.
Пренебрегая трением, закон сохранения механической энергии можно записать следующим образом:
mghmax |
1 |
I |
2 |
(6) |
2 |
max |
|
||
|
|
|
|
Считая, что нижний диск совершает гармонические колебания, можно зависимость углового смещения диска от времени записать так:
2
0 sin T t
где - угловое смещение к рассматриваемому моменту времени t, о- амплитуда,
T-период гармонических колебаний. Тогда:
d |
2 |
|
cos |
2 |
t |
|
dt |
|
T |
0 |
T |
||
|
|
|
|
|||
Угловая скорость диска
d |
2 |
|
cos |
2 |
t |
|
dt |
|
T |
0 |
T |
||
|
|
|
|
|||
При прохождении положения равновесия:
|
2 |
|
(7) |
|
max |
|
0 |
||
T |
||||
|
||||
|
|
|
Высоту hmax можно рассчитать следующим образом:
9
h |
h1 |
|
h2 |
|
h1 |
h2 |
|
h1 |
h2 |
|
|
|
|
h12 |
h22 |
|
h12 h22 |
|
|||||||
|
|
|
h1 |
h2 |
|
|
|
|
|
h1 |
h2 |
|
2l |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Если R< l , можно принять h1 |
|
|
|
h2 2l |
|
|
|
|
|
||||||||||||||||
В этом случае |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
h2 |
|
h |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hmax |
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
2l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Из рисунка 4 видно, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
h2 |
l 2 |
R |
|
r 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h2 |
l 2 |
|
АВ 2 l 2 |
R 2 r 2 |
2Rr cos |
0 |
|
|
|
|
|
||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4Rr sin 2 |
|
0 |
|
|
|
|
|
|
|
|
|
|||
|
|
2Rr 1 |
|
cos 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
hmax |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
2l |
|
|
|
2l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Так как угол |
|
|
о мал, то значение синуса равно его аргументу, поэтому |
||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin 2 |
o |
|
|
o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rr |
2 |
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
hmax |
|
0 |
|
(8) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2l |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя выражения (7) и (8) в (6), получаем
I |
mgRrT 2 |
||
4 |
2 l |
||
|
|||
где т – масса подвеса, кг;
g – ускорение свободного падения, м/с2; R – радиус нижнего диска, м;
r – радиус верхнего диска, м; l – длина нитей подвеса, м;
T – период колебания, с.
Формула (9) - рабочая формула для методом крутильных колебаний.
(9)
определения момента инерции тел
3 ТЕХНИКА БЕЗОПАСНОСТИ
При работе с трифилярным подвесом запрещается раскачивать подвес во избежание падения грузов и получения травм.
4 ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1 Определите t - время N=20 полных колебаний подвеса. Колебания (крутильные!!!) должны быть гармоническими, поэтому не рекомендуется сильно раскачивать подвес.
Вращательный момент, необходимый для начала крутильных колебаний, сообщается платформе нажатием рычажка, связанного с верхним диском
10