

microprocessors_CD_inst / Docum / KURSMP_2004
.pdfМИНИСТРЕРСТВО ВЫСШЕГО ОБРАЗОВАНИЯ РФ
МОСКОВСКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ ПРИБОРОСТРОЕНИЯ И ИНФОРМАТИКИ
КАФЕДРА "ПЕРСОНАЛЬНАЯ ЭЛЕКТРОНИКА"
Методические указания и задания по курсовой работе по курсу "Микропроцессоры и микро-ЭВМ в Персональной электронике" для студентов специальности 2008
Москва 2004
1. ЗАДАНИЯ НА КУРСОВУЮ РАБОТУ
В соответствии с тремя последними цифрами шифра студента необходимо выбрать номера варианта и подварианта задания на курсовую работу по табл.1.1. Для этого выбирают строку с номером, совпадающим с последней цифрой шифра студента, и столбец, совпадающий с предпоследней цифрой шифра. На пересечении этих строки и столбца содержится ячейка, разделенная на 4 сектора. Сектор выбирается по третьей справа цифре шифра. Левый верхний сектор выбирается при цифре 0, правый верхний сектор выбирается при цифре 1, левый нижний сектор выбирается при цифре 2, правый нижний сектор выбирается при цифре 3. Если цифра больше 3, то выбор аналогичен диапазону 0 -3. В каждом секторе указаны две цифры, разделенные точкой. Первая цифра определяет номер варианта задания, а вторая-номер подварианта, который задает числовые данные варианта. Эти данные надо взять из соответствующей таблицы, помещенной сразу же за текстом задания для выбранного варианта.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1.1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Предпосле |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дняя цифра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ю |
0 |
|
|
1 |
|
2 |
|
3 |
|
4 |
|
5 |
|
6 |
|
7 |
|
8 |
|
9 |
|
Последняя |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
цифра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шифраЯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
12. |
8 |
11. 2 |
14. 9 |
8. 3 |
14. 6 |
2. 1 |
3. 7 |
9. 1 |
14. 7 |
15. 3 |
13. 4 |
7. 0 |
4. 7 |
6. 4 |
6. 5 |
3. 0 |
10.7 |
11. 4 |
9. 5 |
14. 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. 7 |
|
14. 8 |
15. 4 |
1. 7 |
6. 4 |
9. 8 |
10. 3 |
5. 2 |
3. 7 |
12. 7 |
8. 4 |
12. 6 |
1. 8 |
14.5 |
5. 9 |
15. 4 |
7. 4 |
9. 1 |
13. 1 |
9. 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
15. 0 |
3. 3 |
9. 3 |
1. 1 |
7. 9 |
8. 4 |
10. 0 |
7. 8 |
8. 2 |
7. 2 |
5. 9 |
15. 6 |
12. 8 |
1. 4 |
7. 7 |
12. 9 |
3. 1 |
11. 1 |
15. 1 |
7. 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. 5 |
|
11. 9 |
4. 8 |
12. 4 |
2. 3 |
7. 5 |
14. 8 |
11. 7 |
2. 3 |
3. 6 |
7. 3 |
14.7 |
2. 4 |
9. 3 |
10. 8 |
3. 0 |
2. 6 |
7. 0 |
11. 8 |
8. 7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
15. 4 |
1. 4 |
5. 2 |
9. 0 |
7. 5 |
12.9 |
14. 5 |
4. 7 |
7. 4 |
2. 4 |
10. 5 |
8. 0 |
11. 2 |
4. 9 |
9. 1 |
15.5 |
9. 5 |
13. 6 |
15. 3 |
3. 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. 2 |
|
1. 2 |
15. 3 |
3. 9 |
4. 7 |
12.8 |
1. 5 |
12. 1 |
10. 9 |
2. 7 |
11. 7 |
15. 9 |
8. 8 |
3. 4 |
4. 6 |
13. 3 |
15. 7 |
14. 3 |
14. 2 |
10. 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
6. 0 |
|
12. 9 |
6. 5 |
4. 7 |
13. 6 |
15.8 |
9. 3 |
5. 9 |
13. 6 |
15. 1 |
10. 6 |
12. 4 |
9. 4 |
3. 2 |
14. 4 |
8. 9 |
8. 8 |
8. 4 |
14. 2 |
4. 6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10. 2 |
13. 4 |
5. 5 |
13. 9 |
4. 0 |
9. 6 |
5. 1 |
5. 2 |
12. 2 |
15. 3 |
1. 5 |
15. 4 |
6. 1 |
4. 0 |
14. 7 |
3. 6 |
10. 1 |
12. 6 |
8. 8 |
6. 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
4. 8 |
|
1. 7 |
7. 4 |
6. 9 |
12. 5 |
2. 9 |
8. 9 |
5. 4 |
4. 4 |
5. 4 |
7. 9 |
11. 0 |
1. 3 |
7. 7 |
13. 7 |
8. 8 |
14. 2 |
9. 4 |
7. 9 |
1. 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. 2 |
|
2. 1 |
10. 3 |
6. 3 |
3. 2 |
4. 9 |
7. 7 |
3. 3 |
11. 5 |
5. 5 |
6. 1 |
2. 6 |
6. 7 |
11. 7 |
14. 5 |
9. 7 |
12. 5 |
1. 6 |
15. 4 |
7. 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
12. 1 |
1. 6 |
5. 3 |
10. 9 |
12. 8 |
7. 6 |
12. 1 |
1. 6 |
10. 8 |
5. 7 |
14. 9 |
6. 5 |
12. 3 |
2. 0 |
8. 3 |
13. 2 |
13. 5 |
2. 8 |
1. 4 |
6. 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. 0 |
|
3. 5 |
11. 5 |
11. 2 |
5. 3 |
6. 0 |
6. 6 |
15.2 |
10. 9 |
2. 2 |
5. 6 |
11. 9 |
10. 1 |
3. 3 |
7. 1 |
9. 8 |
14. 4 |
8. 7 |
2. 9 |
15. 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
13. 5 |
7. 7 |
10. 9 |
2. 0 |
2. 2 |
9. 2 |
11. 5 |
12. 7 |
2. 3 |
2. 5 |
13. 4 |
15. 4 |
11. 3 |
1. 8 |
1. 8 |
14. 2 |
12. 2 |
8. 4 |
6. 3 |
12. 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13. 0 |
6. 7 |
14. 9 |
5. 4 |
7. 3 |
3. 8 |
12. 1 |
4. 2 |
11. 2 |
11.9 |
15. 9 |
10. 7 |
15. 6 |
14. 8 |
14. 9 |
9. 7 |
12. 8 |
2. 0 |
6. 1 |
6. 9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
11. 3 |
15. 2 |
4. 8 |
4. 5 |
14. 9 |
2. 0 |
5. 2 |
1. 9 |
5. 7 |
12. 2 |
8. 0 |
3. 2 |
12. 8 |
4. 2 |
13. 6 |
1. 6 |
10. 2 |
13. 7 |
13. 9 |
2. 3 |
|
|
1. 3 |
|
11. 9 |
4. 6 |
11. 7 |
13. 8 |
8. 4 |
12. 7 |
7. 4 |
7. 4 |
8. 4 |
6. 1 |
11. 6 |
8. 3 |
13. 3 |
13. 2 |
12. 3 |
12. 0 |
2. 6 |
15. 4 |
6. 6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
7. 4 |
|
6. 7 |
2. 0 |
4. 9 |
14. 1 |
10.4 |
9. 1 |
7. 3 |
2. 3 |
13.3 |
5. 9 |
1. 6 |
4. 2 |
7. 1 |
12. 2 |
9. 2 |
14. 1 |
2. 8 |
9. 9 |
13. 6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7. 2 |
|
15. 1 |
2. 8 |
5. 0 |
11. 0 |
7. 8 |
11. 6 |
10. 1 |
4. 7 |
12. 0 |
7. 5 |
13. 8 |
13. 6 |
8. 2 |
4. 7 |
7. 3 |
10. 7 |
4. 2 |
5. 6 |
6. 9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
12. 8 |
12. 7 |
9. 5 |
14. 7 |
15. 2 |
9. 0 |
15. 5 |
2. 5 |
11. 5 |
15. 7 |
3. 8 |
14. 5 |
9. 2 |
10. 7 |
12. 3 |
3. 3 |
3. 9 |
8. 1 |
12. 4 |
14. 6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14. 8 |
1. 2 |
3. 7 |
11. 4 |
4. 3 |
4. 2 |
7. 1 |
12. 7 |
8. 5 |
3. 9 |
3. 8 |
4. 8 |
12. 4 |
10. 1 |
8. 1 |
15. 3 |
5. 9 |
9. 8 |
15. 8 |
1. 8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

Вариант 1. Разработать систему измерения и стабилизации температуры среды, которая может меняться в диапазоне Tmin...Tmax. В качестве датчика используется терморезистор, падение напряжения на котором прямо пропорционально температуре. Это напряжение подается на вход АЦП. Необходимо: 1) Подобрать тип терморезистора, который имеет характеристики, выбранные из указанного ниже ряда. Этот выбор должен
обеспечивать заданную точность измерения температуры DТ/Т % в заданном диапазоне изменения температуры. 2) Измеренное значение температуры хранить в оперативной памяти. 3) Предусмотреть включение нагревательного элемента (подачей лог.1 на вход силового блока), если температура ниже установленного значения. 4) С помощью переключателей предусмотреть выбор устанавливаемой температуры в несколько равномерно расположенных по диапазону значений. Предусмотреть включение светодиода при достижении температурой установленного значения. Зависимость напряжения на терморезисторе от температуры описывается формулой: U = Uo + S(T-Tmin), где Uo - начальное напряжение при T = Tmin, которое выбирается из ряда: -5,12; -2,56; -1,25; -0,64; -0,32; +0,32; +0,64; +1,25; +2,56; +5,12; +10,24 В. Коэффициент S может принимать
значения: 1; 0,1; 0,01 В/ °С.
Основные параметры: А - Диапазон температур Tmin...Tmax, °C, Б - Точность
измерения, ±DТ/Т,%, В - число устанавливаемых значений температуры по диапазону. Эти параметры указаны в табл. 1.2.
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1.2 |
|||
Номер |
1 |
|
2 |
3 |
4 |
5 |
6 |
|
7 |
8 |
9 |
|
|
0 |
|
подварианта----- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
0... |
+70 |
-15... |
-70... |
-70... |
+15... |
0 |
... +70 |
-15... |
+19 |
... 0... |
+20 |
|
-10 ... |
|
|
|
|
+35 |
+70 |
+125 |
+25 |
|
|
+35 |
+21 |
|
+70 |
|
||
Б |
5 |
|
5 |
10 |
20 |
2 |
1 |
|
1 |
0,1 |
0,5 |
|
|
3 |
|
В |
|
5 |
3 |
6 |
10 |
4 |
|
6 |
3 |
2 |
3 |
|
|
5 |
|
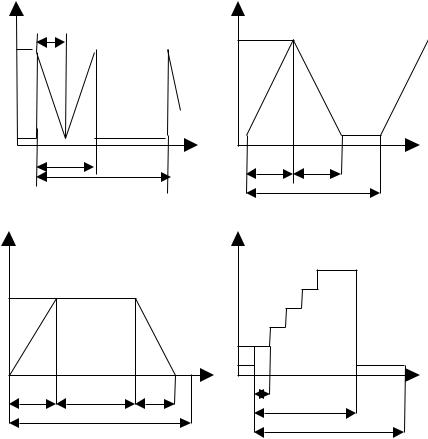
Вариант 2. Спроектировать МП генератор импульсов сложной формы. В зависимости от подварианта генератор должен выдавать следующие виды импульсов (рис. 1.1).
Выходным устройством генератора является ЦАП, управляемый МПС. Период следования импульсов - Т. Точность формирования напряжения DU/U %, соблюдения
временных интервалов - DT/T %.
Параметры каждого подварианта показаны в табл. 1.3.
Вариант 3. Разработать систему измерения частоты или периода импульсов уровня ТТЛ. Рекомендуется использовать либо внутренние таймеры МК, либо БИС ПИТ КР580ВИ53. Диапазон измерений :Fmin...Fmax (Tmin...Tmax). Точность измерений
должна быть не хуже DF/F % (DT/T %). Предусмотреть вывод значений частоты (периода) в двоично-десятичном коде в определенные ячейки памяти вместе с кодом единицы измеряемой величины (мс, с, Гц, кГц, МГц и т.д.). Числовые значения для подвариантов указаны в табл. 1.4.
U |
t2 |
|
|
|
|
U1 |
|
U1 |
|
|
|
|
|
|
|
|
|
t |
|
|
t1 |
T |
|
|
|
|
|
а) |
|
б) |
|
U |
|
|
|
U1 |
|
|
|
|
|
t |
U1 |
t1 |
t2 |
t3 |
|
|
T |
|
|
в) |
|
|
г) |
|
t |
t1 |
t2 |
|
T |
U |
|
t |
t1 |
Nt1 |
T |
Рис.1.1 Вариант 4. Разработать автоматизированную систему отбраковки резисторов на
производстве. Изготовленные резисторы необходимо рассортировать по допускам и поместить в отдельные контейнеры.
Управление операциями по сортировке осуществляется роботом, который берет очередной резистор и помещает его в зажим, он же после измерения сопротивления вынимает его и кладет в соответствующий контейнер. Измерение сопротивления проводится на основе измерения падения напряжения на резисторе при прохождении через него известного тока, т.е. Rизм = Uизм/Iэталон. Управление роботом и измерениями осуществляется МПС. Ее функции следующие:

|
|
|
|
|
|
|
|
|
|
Таблица 1.3 |
|
Номер |
подва |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
рианта-----> |
|
|
|
|
|
|
|
|
|
|
|
Параметры |
|
|
|
|
|
|
|
|
|
|
|
Вид кривой |
|
а |
б |
в |
г |
а |
б |
в |
г |
а |
б |
по рис.1.1 |
|
|
|
|
|
|
|
|
|
|
|
Временные |
|
|
|
|
|
|
|
|
|
|
|
соотношения: |
|
|
|
|
|
|
|
|
|
|
|
Т, мс |
|
1 |
1 |
1 |
1 |
10 |
10 |
10 |
10 |
0,1 |
100 |
t1,мс |
|
0,5 |
0,5 |
0,4 |
0,1 |
1 |
3 |
1 |
1 |
0,05 |
10 |
t2,мс |
|
0,25 |
0,5 |
0,2 |
- |
0,5 |
2 |
5 |
- |
0,02 |
20 |
t3,мс |
|
- |
- |
0,4 |
- |
- |
- |
1 |
- |
- |
- |
N |
|
- |
- |
- |
5 |
- |
- |
- |
10 |
- |
- |
U1, В |
|
10 |
10 |
10 |
1 |
5 |
5 |
5 |
0,5 |
15 |
15 |
DU/U,% |
|
2 |
2 |
2 |
2 |
1 |
1 |
1 |
1 |
0,5 |
5 |
DT/T,% |
|
10 |
10 |
10 |
10 |
1 |
1 |
1 |
0,1 |
0,5 |
0,5 |
|
|
|
|
|
|
|
|
|
|
Таблица 1.4 |
|
Номер подва- |
|
|
|
|
|
|
|
|
|
|
|
рианта-----> |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
10 |
Параметры |
|
|
|
|
|
|
|
|
|
|
|
Вид измере- |
|
|
|
|
|
|
|
|
|
|
|
ний:ч-часто- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
та,п-период |
ч |
п |
ч |
п |
ч |
п |
ч |
п |
ч |
|
п |
|
|||||||||||
Диапазон измерений, |
10... |
1... |
100. |
0,1 |
104 |
0,01 |
1... |
1... |
1... |
|
10 |
Гц |
1000 |
0,01 |
105 |
... |
... |
... |
10 |
0,01 |
104 |
|
... |
или сек |
|
|
|
0,001 |
105 |
10-4 |
|
|
|
|
0,001 |
Точность из- |
0,1 |
0,1 |
1 |
1 |
10 |
10 |
0,01 |
1 |
1 |
|
1 |
мерений, % |
|
|
|
|
|
|
|
|
|
|
|
-выдача команды роботу на установку резистора (какой-либо бит в УВВ устанавливается в 0 и затем обратно в 1),
-проверка, установлен ли резистор (чтение какого-либо бита из УВВ: 0 - не установлен, 1 - установлен),
-проведение измерений сопротивления резистора (подача на аналоговый вход АЦП и считывание цифрового кода измеренного напряжения),
-команда роботу снять резистор и поместить его в заданный контейнер (всего N контейнеров для допусков n1...n5 и для резисторов вне этих допусков) (N отдельных битов
вУВВ).
Затем цикл должен повторяться.
Необходимо предусмотреть включение режима "эталонный резистор" - т.е. измерение и занесение в память номинального значения при смене партии резисторов. Нужно выбрать значение "эталон" для данного номинала резистора, чтобы выходное напряжение измерителя соответствовало диапазону входных напряжений АЦП. Необходимо в памяти подсчитывать число резисторов, попавших в каждый контейнер. Предусмотреть зажигание светодиода "вне допуска" при измеренном сопротивлении резистора, которое не входит в самый широкий заданный допуск. Конкретные величины задания указаны в табл. 1.5.

|
|
|
|
|
|
|
|
|
Таблица 1.5 |
||
Номер подва- |
|
|
|
|
|
|
|
|
|
|
|
рианта-----> |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Параметры |
|
|
|
|
|
|
|
|
|
|
|
Диапазон номиналов |
1... |
1Е3 |
1Е4 |
0,1 |
1Е5 |
1... |
1Е3 |
1Е4 |
0,1 |
1Е5 |
|
резисторов, |
100 |
... |
... |
... |
... |
100 |
... |
... |
... |
... |
|
Ом |
|
1Е4 |
1Е5 |
1 |
1Е6 |
|
1Е4 |
1Е5 |
1 |
1Е6 |
|
|
|
|
|
|
|
|
|
|
|
||
Кол-во полей |
2 |
3 |
4 |
5 |
2 |
2 |
3 |
4 |
5 |
3 |
|
допуска, N |
|
|
|
|
|
|
|
|
|
|
|
Поля допуска |
|
|
|
|
|
|
|
|
|
|
|
+/- DR/R,% |
|
|
|
|
|
|
|
|
|
|
|
n1 |
5 |
5 |
1 |
0,1 |
1 |
5 |
5 |
1 |
0,1 |
1 |
|
n2 |
10 |
10 |
5 |
1 |
5 |
10 |
10 |
5 |
1 |
5 |
|
n3 |
- |
20 |
10 |
5 |
- |
- |
20 |
10 |
5 |
- |
|
n4 |
- |
- |
20 |
10 |
- |
- |
- |
20 |
10 |
- |
|
n5 |
- |
- |
- |
20 |
- |
- |
- |
- |
20 |
- |
|
Примечание: 1Е3=1000;1Е4=10000 и.т.д.
Вариант 5. Разработать МП оконечное устройство индикации цифрового частотомера. Индикация осуществляется N-разрядным десятичным табло на основе светодиодных семисегментных индикаторов (ССИ). На рис. 1.2 показано подключение сегментов индикатора a...h к разрядам выходного регистра. Цифра синтезируется из подсвеченных сегментов a...h ССИ. Например, для зажигания цифры "6" требуется подсветить сегменты a, f, e, d, c, g. В качестве выходного регистра можно использовать БИС КР580ВВ55А или КР580ИР82: если в данный разряд записать "1", то сегмент будет гореть, если "0" - то погаснет. Разряд D7 управляет десятичной точкой. Диапазон измерения частоты или периода Fmin...Fmax (Tmin...Tmax).
Предусмотреть смену показаний индикатора с периодом t. Значения частоты или периода считываются в двоично-десятичном виде с трех каналов ППИ КР580ВВ55А: по каналам А, В и С передаются последовательно соответственно: по А - 1-я, 4-я..., по В - 2-я, 5-я...и по С - 3-я, 6-я...двоично-десятичные цифры частоты или периода. Предусмотреть подключение к МПС N регистров для вывода числа, где N - разрядность индикатора, а также формирование десятичной точки в определенном индикаторе. Для заданного частотного или временного диапазона нужно определить это число N. Численные значения параметров приведены в табл. 1.6.
|
|
|
|
|
|
|
|
|
Таблица 1.6 |
|
Номер подва- |
|
|
|
|
|
|
|
|
|
|
рианта-----> |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
Параметры |
|
|
|
|
|
|
|
|
|
|
Диапазон выводимых |
|
|
|
|
|
|
|
|
|
|
значений: |
|
|
|
|
|
|
|
|
|
|
Fmin...Fmax, |
1... |
|
1... |
|
10-6 |
|
10-4 |
|
10-1 |
|
Гц |
104 |
|
106 |
|
106 |
|
104 |
|
103 |
|
Tmax...Tmin, |
|
1... |
|
1... |
|
106 |
|
104 |
|
10.. |
c |
|
10-4 |
|
10-6 |
|
10-6 |
|
10-4 |
|
10-3 |
t, c |
1 |
0,1 |
1 |
0,1 |
1 |
0,1 |
1 |
0,1 |
0,1 |
1 |
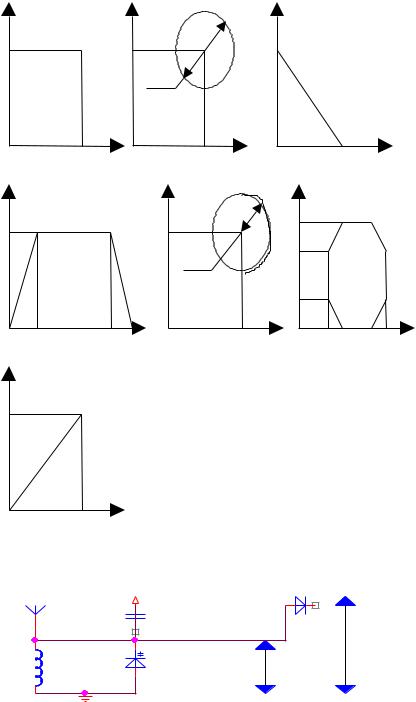
Вариант 6. Разработать МП робототехническую систему вычерчивания плоских фигур сложной формы (используемую, например, при автоматическом раскрое материалов). Исполнительный механизм системы состоит из двух шаговых двигателей: один перемещает рабочий орган по координате Х, другой - по Y. За один шаг двигатели перемещают орган на х мм или y мм. Составить программу вычерчивания одной из указанных на рис. 1.3 фигур. Считать, что в начальном состоянии рабочий орган находится в точке Х = 0, Y = 0.

|
a |
|
|
|
|
f |
b |
||
|
g |
|
|
|
|
e |
c |
||
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D7 |
D6 |
|
D5 |
D4 |
D3 |
|
D2 |
|
D1 |
D0 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Численные значения задачи указаны в табл.1.7. |
|
|
|
|
|
Таблица 1.7 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Номер подва |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рианта-----> |
|
1 |
|
|
2 |
|
|
3 |
|
4 |
|
|
5 |
6 |
7 |
|
8 |
9 |
10 |
|||
|
Параметры |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вид вычерчиваемой |
|
а |
|
|
б |
|
в |
|
г |
|
|
д |
е |
ж |
а |
б |
в |
|||||
|
фигуры по рис. 1.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Координаты точек, мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y1 |
20 |
15 |
|
15 |
25 |
|
|
15 |
10 |
30 |
|
50 |
30 |
50 |
||||||||
|
X1 |
30 |
15 |
|
30 |
10 |
|
|
15 |
10 |
15 |
|
40 |
30 |
100 |
||||||||
|
Х2 |
- |
|
- |
|
- |
20 |
|
|
- |
20 |
- |
|
- |
- |
- |
|||||||
|
Х3 |
- |
|
- |
|
- |
30 |
|
|
- |
30 |
- |
|
- |
- |
- |
|||||||
|
Х4 |
- |
|
- |
|
- |
- |
|
|
- |
40 |
- |
|
- |
- |
- |
|||||||
|
Y2 |
- |
|
- |
|
- |
- |
|
|
- |
20 |
- |
|
- |
- |
- |
|||||||
|
Y3 |
- |
|
- |
|
- |
- |
|
|
- |
30 |
- |
|
- |
- |
- |
|||||||
|
D |
- |
|
10 |
|
- |
- |
|
|
- |
- |
- |
|
- |
20 |
- |
|||||||
|
R |
- |
|
- |
|
- |
- |
|
|
10 |
- |
- |
|
- |
- |
- |
|||||||
Вариант 7. Создать МП систему управления настройкой приемника. Упрощенная схема приемника изображена на рис. 1.4.
Контур приемника состоит из индуктивности Lк и емкости варикапа VD1. Эта емкость зависит от подаваемого на варикап постоянного напряжения Uупр (зависимость
обратнопропорциональная). Выделенное контуром ВЧ напряжение Uк детектируется
амплитудным детектором (АД) и при настройке на станцию на выходе АД получается сигнал Uвых. Необходимо подключить МПС к приемнику так, чтобы МП измеряя
величину Uвых мог воздействовать на варикап с целью настройки входного контура. МПС должна обеспечить:
-точную настройку на заданную станцию (величина рассогласования по частоте не должна превышать 3% от ширины полосы контура 2 Df,
-поиск станций в диапазоне частот Fmin...Fmax.
Частота настройки контура зависит от управляющего напряжения следующим образом:
Fk = Fko + S(Uупр -Uупро),
Y |
|
|
Y |
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
||
Y1 |
|
|
Y1 |
|
|
|
Y1 |
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
X |
|
|
X |
|
|
X |
А) |
|
X1 |
|
Y Б) |
X1 |
|
В) |
X1 |
|
|
|
|
|
|
|
|
|||
Y |
|
|
|
|
|
|
Y |
|
|
Y1 |
|
|
|
Y1 |
|
|
Y3 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
R |
|
Y2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y1 |
|
|
|
|
|
|
X |
|
|
X |
|
X |
|
|
|
|
|
|
|
|
|
|
|
X1 |
|
X2 |
X3 |
|
X1 |
|
X1 X2 |
X3X4 |
|
|
Г) |
|
|
Д) |
|
Е) |
|
|
|
|
|
|
|
|
|
|||
Y |
|
|
|
|
|
|
|
|
|
Y1 |
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
Ж) |
X1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.1.3 |
|
|
|
|
|
|
Амплитудный детектор |
||
BA1 |
|
|
|
Uупр |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C1 |
|
|
VD2 |
|
|
|
|
L1 |
|
|
|
|
|
|
Uout |
|
|
|
|
|
|
Uk |
|
|
|
|
|
|
|
VD1 |
|
|
|
|
|
Рис.1.4 |
|
|
|
|
|
|
|
|
|
где Fko - начальное значение частоты контура при Uупр = Uупро, S -крутизна характеристики преобразования, кГц/В. Необходимо выбрать подходящий для заданного диапазона частот варикап. Параметры резонансной системы и варикапа указаны в табл.1.8.
Таблица 1.8
Параметры--> |
Fko, МГц |
Uупро, В |
S, кГц/В |
Номер варикапа |
|
|
|
1 |
0,25 |
1 |
25 |
2 |
0,5 |
1 |
50 |
3 |
1 |
2 |
62,5 |
4 |
5 |
3 |
142 |
5 |
10 |
5 |
400 |
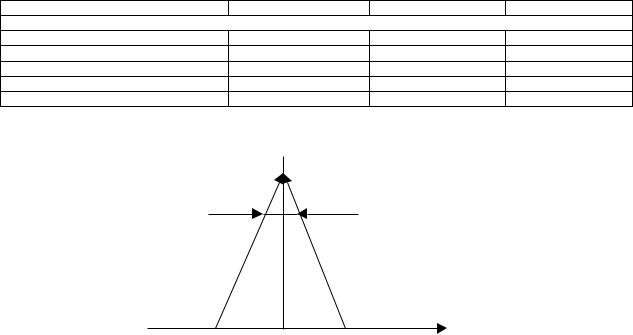
Для простоты считать, что резонансная кривая Uk( f) будет линейной, как показано на рис. 1.5.
 U
U
2 f
f
0
Рис.1.5
Примечание: Для поиска станций и настройки целесообразно использовать метод "половинного деления" шага дискретизации по частоте. Численные параметры подвариантов указаны в табл. 1.9.
Таблица 1.9
Номер подва- |
|
|
|
|
|
|
|
|
|
|
|
рианта-----> |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
Параметры |
|
|
|
|
|
|
|
|
|
|
|
Диапазон частот |
0,25 |
0,5 |
1... |
5... |
10 |
0,25 |
0,5 |
1... |
5... |
10 |
|
поиска, МГц |
0,5 |
1 |
1,5 |
7,5 |
12 |
0,5 |
1 |
1,5 |
7,5 |
12 |
|
Полоса час- |
3 |
3 |
3 |
10 |
10 |
3 |
3 |
3 |
10 |
10 |
|
тот, f,кГц |
|
|
|
|
|
|
|
|
|
|
Вариант 8. Разработать интеллектуальную систему охранной сигнализации. Она устанавливается в помещении, состоящем из нескольких комнат и имеющем один входвыход. Состав системы: центральный блок, устанавливаемый в недоступном месте, управляющий работой всей системы, клавиатура, с которой происходит управление и программирование блока (устанавливается во внутреннем помещении непосредственно около входной двери и содержит 10 кнопок для ввода цифр, кнопку "Ввод" для подтверждения ввода, 7-сегментный индикатор для отображения цифр и команд), датчики проникновения (устанавливаются на всех дверях и окнах), сирена для выдачи сигнала тревоги.
Работа системы должна быть следующей:
При включении питания система не запрограммирована. Она ждет ввода с клавиатуры кода постановки на охрану. Код состоит из нескольких цифр, который водится с клавиатуры по одной цифре (эта цифра должна отображаться на индикаторе), причем
ввод цифры должен заканчиваться нажатием клавиши "Ввод". После ввода кода постановки на охрану надо ввести таким же образом код снятия с охраны. После этого система готова к работе. При покидании помещения пользователь набирает на клавиатуре код постановки на охрану (заданные цифры без промежуточного нажатия кнопки "Ввод" и эти цифры должны отображаться на экране), По окончании ввода всех цифр на индикаторе должен выводится символ "С" - признак постановки и пользователю дается несколько секунд для покидания помещения и закрытия входной двери. После чего происходит контроль всех датчиков. Срабатывание сирены должно происходить мгновенно при срабатывании всех датчиков, кроме датчика на входной двери. Датчик на входной двери действует с задержкой на несколько секунд, чтобы дать возможность вошедшему набрать код снятия с охраны. Если код набран правильно (опять набор нужных цифр без нажатия кнопки "Ввод"), система переходит в режим ожидания ввода кода постановки на охрану. В противном случае выдается сигнал тревоги.
Основные параметры системы: А - количество цифр в коде постановки на охрану, Б - количество цифр в коде снятия с охраны, В - количество датчиков, не считая на входной двери, Г - время задержки срабатывания системы при открывании входной двери, сек. Эти параметры указаны в табл. 1.10.
|
|
|
|
|
|
|
|
|
|
Таблица 1.10 |
|
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
0 |
подвари |
|
|
|
|
|
|
|
|
|
|
|
анта |
|
|
|
|
|
|
|
|
|
|
|
А |
3 |
4 |
5 |
4 |
3 |
2 |
5 |
3 |
4 |
|
3 |
Б |
5 |
4 |
3 |
5 |
2 |
5 |
3 |
4 |
3 |
|
4 |
В |
4 |
5 |
6 |
5 |
3 |
7 |
5 |
8 |
4 |
|
5 |
Г |
30 |
45 |
25 |
35 |
60 |
40 |
55 |
30 |
35 |
|
45 |
Вариант 9. Разработать систему стабилизации и регулировки числа оборотов электродвигателя постоянного тока.
Электродвигатель меняет частоту оборотов по определенному закону в зависимости от напряжения на специальной обмотке. Измерение частоты вращения осуществляется датчиком на валу двигателя, который срабатывает каждый оборот вала. Необходимо предусмотреть стабилизацию частоты вращения с заданной точностью, переключение частоты с помощью переключателя, возможность реверсирования направления вращения специальной кнопкой.
Основные параметры системы: А - Вид зависимости частоты вращения от напряжения на обмотке: y=axn +b, где y- частота вращения, об/мин, х - напряжение на обмотке, В, Б - нижний предел регулируемой частоты оборотов, об/мин, В - верхний предел регулируемой частоты оборотов, об/мин, Г - точность регулирования в процентах от номинальной частоты вращения, % от максимального значения, Д - количество переключений номинальной частоты вращения, Е - шаг регулирования при переключении, об/мин, Ж - необходимость в реверсировании двигателя.
Эти параметры указаны в табл. 1.11.