

ОГЛАВЛЕНИЕ
ГЛАВА1
ВВЕДЕНИЕ 4
1.1 ОСНОВНЫЕ ПОНЯТИЯ И ФУНКЦИИ 4
1.2 МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКИХ
ДВИГАТЕЛЕЙ И ПРОИЗВОДСТВЕННЫХ МЕХАНИЗМОВ 5
1.3 КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ МАШИН 7
ГЛАВА2
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПОСТОЯННОГО ТОКА 9
2.1 ОСНОВНЫЕ ПОНЯТИЯ 9
2.1.1 Устройство машины постоянного тока 9
2.1.2 Электродвижущая сила якоря 10
2.1.3 Уравнение вращающего момента 12
2.1.4 Реакция якоря 13
2.1.5 Процесс коммутации 14
2.2 ГЕНЕРАТОР ПОСТОЯННОГО ТОКА 16
2.2.1 Режим генератора постоянного тока 16
2.2.2 Характеристики генераторов постоянного тока 18
2.2.3 Генератор с независимым возбуждением 18
2.2.4 Процесс самовозбуждения генератора постоянного тока 19
2.2.5 Генератор с паралельным возбуждением 20
2.2.6 Генератор со смешанным возбуждением 20
2.3 ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА 21
2.3.1 Режим двигателя постоянного тока 21
2.3.2 Характеристики двигателей постоянного тока 22
2.3.3 Двигатель с независимым возбуждением 23
2.3.4 Двигатель с паралельным возбуждением 24
2.3.5 Двигатель с последовательным возбуждением 24
2.3.6 Двигатель со смешанным возбуждением 25
Глава 3
ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА 27
3.1 АСИНХРОННЫЙ ДВИГАТЕЛЬ 27
3.1.1 Принцип действия асинхронного двигателя 27
3.1.2 Вращающееся магнитное поле 28
3.1.3 Логическая диаграмма функционирования 30
3.1.4 Скольжение 31
3.1.5 Элементы конструкции асинхронного двигателя 32
3.1.6 Электродвижущие силы ротора и статора 34
3.1.7 Основные уравнения асинхронного двигателя 35
3.1.8 Вращающий момент 36
3.1.9 Механическая характеристика 37
3.1.10 Потери мошности и КПД двигателя 39
3.1.11 Рабочие характеристики 40
3.2 СИНХРОННЫЙ ДВИГАТЕЛЬ 40
3.2.1 Основные понятия 40
3.2.2 Принцип действия 41
3.2.3 Основные уравнения двигателя 43
3.2.4 Характеристики двигателя 45
Глава 4
ЭЛЕКТРИЧЕСКИЕ МИКРОМАШИНЫ 48
4.1 ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ 48
4.1.1 Двигатели с пусковыми обмотками 49
4.1.2 Двигатели с расщепленными полюсами 50
4.2 КОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ 51
4.2.1 Motores de repulsгo 51
4.2.2 Motores de induзгo com partida а repulзгo 52
4.2.3 Motores de repulsгo-induзгo 53
4.3 УНИВЕРСАЛЬНЫЙ ДВИГАТЕЛЬ 54
4.4 ОДНОФАЗНЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ 54
4.4.1 Двигатель с постоянными магнитами 54
4.4.2 Гистерезисный двигатель 54
4.4.3 Реактивный двигатель 56
4.4.4 Шаговые двигатели 57
Глава 5
ЭЛЕКТРИЧЕКИЕ АППАРАТЫ УПРАВЛЕНИЯ 60
5.1 ОСНОВНЫЕ ПОНЯТИЯ 60
5.2 ЭЛЕКТРОМАГНИТЫ 60
5.2.1 Электромагниты постоянного тока 60
5.2.2 Электромагниты переменного тока 63
5.2.3 Рабочий цикл электромагнита 67
5.3 РЕЛЕ 68
5.3.1 Осеовные понятия 68
5.3.2 Электромагнитное реле 69
5.3.3 Реле времени 70
5.3.4 Тепловое реле 70
5.4 КОНТАКТОРЫ 71
5.4.1 Основные понятия и устройство контактора 71
5.4.2 Схема подключения контактора 73
БИБЛИОГРАФИЯ 74
Глава 1
ВВЕДЕНИЕ
1.1 ОСНОВНЫЕ ПОНЯТИЯ И ФУНКЦИИ
Электропривод - это система, которая преобразует электрическую энергию в механическую, совершает при этом работу и контролирует процесс преобразования.
Схема электропривода содержит электрический двигатель с аппаратурой управления и контроля, органы передачи энергии от двигателя к производственному механизму и сам производственный механизм.
Основные функции электропривода:
а) включение и отключение двигателя от сети питания;
б) управление и (или) контроль необходимых характеристик, таких как, частота вращения, момент, мощность, ток и т.д., во время пуска и торможения, в процессе регулирования скорости.
Функция защиты двигателя специальная, она существует для любого типа электропривода. Поэтому будем рассматривать двигатель всегда с элементами защиты.
Блок-схемы на рисунках 1.1-1.3 иллюстрируют основные типы электропривода.
![]()
Рис.1.1
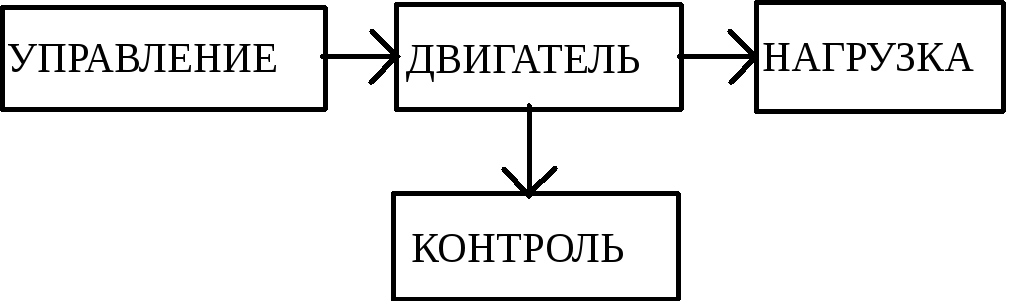
Рис.1.2
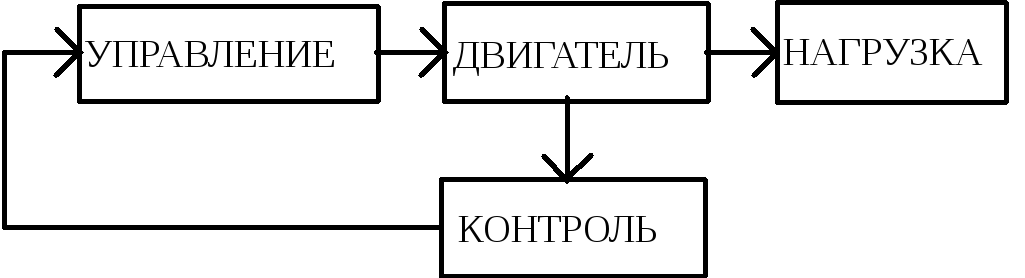
Рис.1.3
На рисунке 1.1 представлена простейшая схема электропривода с заданными элементами управления и без контроля параметров процесса.
Рисунок 1.2 демострирует разомкнутую схему с контролем процесса преобразования, но без обратной связи.
На последней блок-схеме (Рис.1.3) представлена замкнутая автоматическая схема с обратной связью.
Итак схема электропривода имеет три основных элемента:
1) электродвигатель;
2) нагрузка (производственный механизм);
3) управление и контроль (контроллер).
1.2 МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКИХ
ДВИГАТЕЛЕЙ И ПРОИЗВОДСТВЕННЫХ МЕХАНИЗМОВ.
УСЛОВИЕ УСТОЙЧИВОГО ФУНКЦИОНИРОВАНИЯ
ЭЛЕКТРОПРИВОДА
Механическая характеристика М = f (n) - это основная характеристика для выбора схемы электропривода, причем основные критерии выбора: стабильность и экономичность.
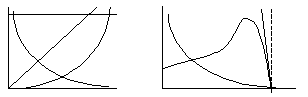
В зависимости от своих механических характеристик, производственные механизмы делятся на следующие группы (Рис.1.4):
1) постоянный момент сопротивления (например: подъемные краны, транспортеры, лифты и т.д.);
2) линейно-возрастающий момент сопротивления (например: мельницы, насосы, электрические пилы и т.д.);
3) нелинейно-возрастающий момент сопротивления (например: вентиляторы, смесители, центрифуги, компрессоры и т.д.);
4) нелинейно-спадающий момент сопротивления (например: металлорежущие станки и прокатные станы.)
Различные электрические двигатели имеют также разные механические характеристики (Рис.1.5):
1) синхронные двигатели;
2) асинхронные двигатели;
3) двигатели постоянного тока с параллельным возбуждением;
4) двигатели постоянного тока с последовательным возбуждением.
Электропривод работает в точке, где пересекаются механические характеристики двигателя и производственного механизма. Назовем момент производственного механизма Мс (моментом сопротивления) и вращающий момент двигателя Мд. Тогда условие устойчивой работы электропривода будет:
![]()
 M
M
M
M