

Повышение точности сау
Рассматривая
задачу точности САУ на установившемся
режиме, мы видели, что ступенчатое
воздействие отрабатывает без ошибки
астатическая система с порядком астатизма
![]() Статическая система в этом случае имеет
постоянную ошибку
Статическая система в этом случае имеет
постоянную ошибку![]() Для того, чтобы система отрабатывала
без ошибки линейно возрастающее
управляющее воздействие, нужно, чтобы
она обладала астатизмом второго порядка
,
Для того, чтобы система отрабатывала
без ошибки линейно возрастающее
управляющее воздействие, нужно, чтобы
она обладала астатизмом второго порядка
,![]() и т.д.
и т.д.
Как же повысить точность САУ?
К основным методам повышения точности САУ относятся:
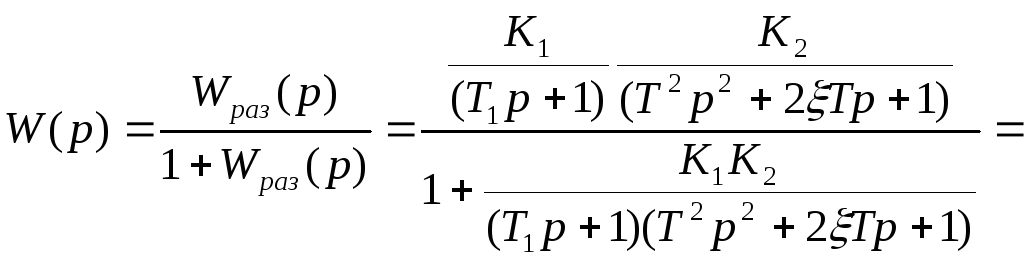
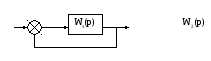
1. Увеличение коэффициента усиления разомкнутой системы
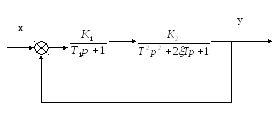
Рис.1
Эта статическая система и она имеет статическую ошибку уже при реакции на постоянное воздействие.
![]() .
.
Обозначим
![]()
Тогда
![]() .
.
На установившемся режиме
![]() .
.
![]() и
и![]()
Т.Е.
![]()
Однако, увеличение
![]() ограничивается устойчивостью САУ.
ограничивается устойчивостью САУ.
Для систем 3-го порядка для выполнения условия устойчивости необходимо:
![]() или
или
 или
или
![]()
В этом проявляется
противоречие между требованием к
точности и устойчивостью. Для уменьшения
![]() надо увеличивать
надо увеличивать![]() ,
а это может привести к нарушению
устойчивости.
,
а это может привести к нарушению
устойчивости.
Таким образом,
повышая
![]() надо одновременно повышать запас
устойчивости, что достигается введением
дополнительных корректирующих устройств.
Увеличить
надо одновременно повышать запас
устойчивости, что достигается введением
дополнительных корректирующих устройств.
Увеличить![]() можно за счет введения дополнительных
усилителей или за счет повышения
коэффициента передачи элементов.
можно за счет введения дополнительных
усилителей или за счет повышения
коэффициента передачи элементов.
2. Повышение порядка астатизма
Повышение порядка астатизма осуществляется введением интегрирующего звена.
Однако введение
дополнительного интегрирующего звена
плохо сказывается на устойчивости САУ,
т.к. САУ устойчива, когда суммарный
сдвиг фаз меньше
![]() .
Интегрирующее звено имеет
.
Интегрирующее звено имеет![]() ,
так что его введение снижает запас
устойчивости системы. Поэтому наряду
с мероприятиями по повышению астатизма
приходится принимать меры для увеличения
запаса устойчивости.
,
так что его введение снижает запас
устойчивости системы. Поэтому наряду
с мероприятиями по повышению астатизма
приходится принимать меры для увеличения
запаса устойчивости.
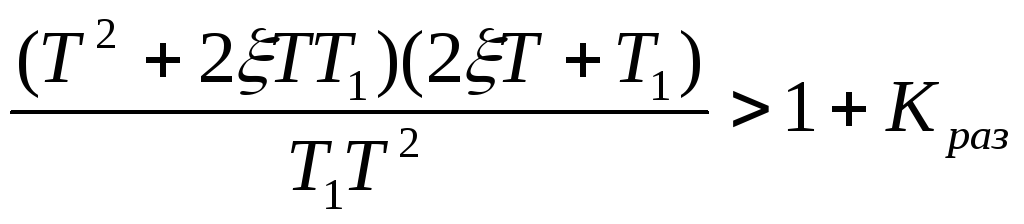
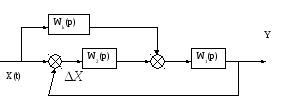
Рассмотрим исходную систему
Рис.2
Обозначим
![]()

Условие устойчивости
![]()
![]() (1) Запомним это
соотношение
(1) Запомним это
соотношение
Это астатическая
система с порядком астатизма
![]() в объекте.
в объекте.
Она без ошибки отрабатывает постоянное управляющее воздействие, но имеет постоянную ошибку при отработке линейно-возрастающего управляющего воздействия.
Для повышения точности при отработке линейно-возрастающего управляющего воздействия введем еще одно интегрирующее звено.
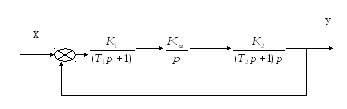

Рис.3
Обозначим
![]()

На установившемся режиме
![]() и
и
![]() ,
а
,
а![]() .
.
Однако, при проверке
этой системы на устойчивость, убеждаемся,
что система неустойчива, т.к. коэффициент
при
![]() .
.
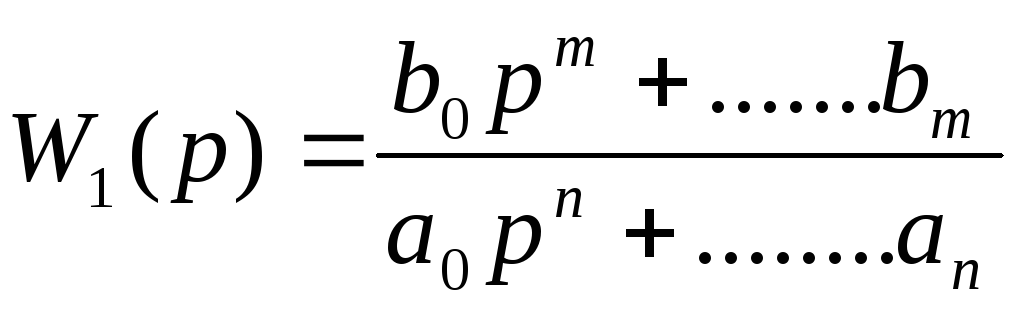
Применение изодромных устройств
Изодромное звено – это звено с передаточной функцией
![]()
Этот способ позволяет повышать точность САУ без значительного ухудшения её запаса устойчивости.
Изодромное звено получается

![]() ,
где
,
где
![]() .
.
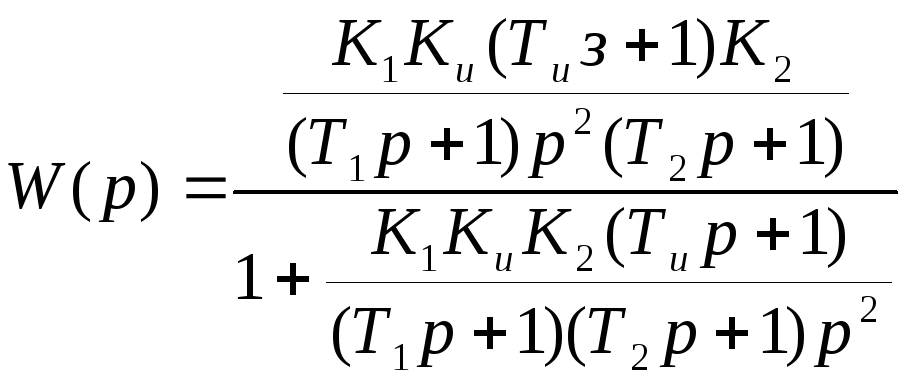
Добавим в схему рис.2, которая была неустойчивая, изодромное звено.

Рис.4
 .
.
Обозначим
![]() .
Тогда
.
Тогда
![]() .
.
Это астатическая
система с порядком астатизма
![]() Она отрабатывает без ошибки по управляющему
воздействию и постоянный и
линейно-возрастающий сигнал.
Она отрабатывает без ошибки по управляющему
воздействию и постоянный и
линейно-возрастающий сигнал.
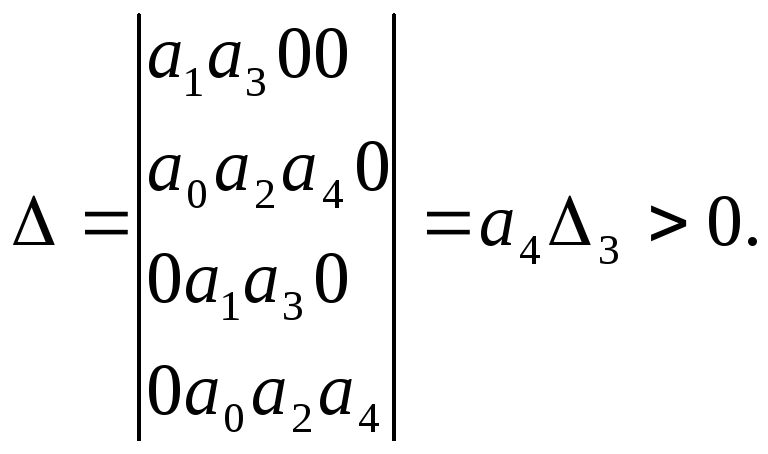
Проверим устойчивость этой системы.
![]() .
.
![]()
![]() ,
,
![]()
![]()
![]() .
.
 Т.к.
Т.к.
![]() то
то![]()

![]()
Т.к
![]() разделим на него
разделим на него
![]()
![]()
или
 - при этом
- при этом
![]() САУ устойчива
САУ устойчива
разделим числитель
и знаменатель на
![]()
![]()
 .
.
Или умножим на
![]()
Учтем, что
![]() и
и
![]() .
Тогда
.
Тогда![]() и
и![]()
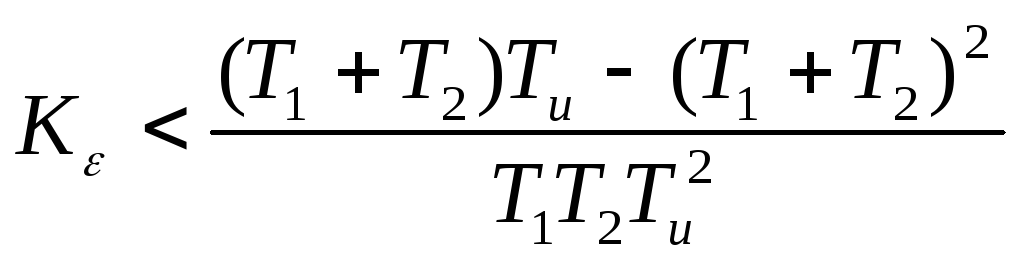
 .
.
При
![]() это условие превращается в
это условие превращается в
![]() (2)
(2)
Условие (2) совпадает с условием устойчивости (1) исходной системы на рис.2 ( без изодромного устройства)
Таким образом,
если в астатическую систему ввести
изодромное устройство с большой
постоянной времени ( что соответствует
малому передаточному коэффициенту
![]() )
то условия устойчивости (2) для системы
с изодромом и условие устойчивости (1)
исходной системы будут мало различаться,
но при этом астатизм системы увеличивается
на 1.
)
то условия устойчивости (2) для системы
с изодромом и условие устойчивости (1)
исходной системы будут мало различаться,
но при этом астатизм системы увеличивается
на 1.
Для повышения порядка астатизма можно вводить несколько изодромных устройств.
Введение неединичной обратной связи
(позволяет уменьшить ошибку по задающему воздействию)
Пусть имеется статическая система с передаточной функцией разомкнутой системы
 (3)
(3)
Например
![]() .
.
Охватим эту систему жесткой отрицательной обратной связью (ЖООС)
![]()
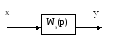
Приведем её к структурной схеме вида:
Найдем
![]() из равенства
из равенства![]() и
и![]() .
.
![]() .
.
![]() .
.
Тогда![]()
![]() =
=![]()
![]() ,
,
![]()
![]()
С учетом уравнения (3) свободный член знаменателя будет равен
![]() .
Если этот член приравнять 1, т.е.
.
Если этот член приравнять 1, т.е.
![]() и
и
![]() ,
то в знаменателе
,
то в знаменателе![]() пропадет свободный член , т.к.
пропадет свободный член , т.к.![]()
В этом случае эквивалентная передаточная функция разомкнутой системы будет равна
 ,
а это система с астатизмом первого
порядка.
,
а это система с астатизмом первого
порядка.
Таким образом, за
счет уменьшения обратной связи на
![]() по отношению к единичной обратной связи
можно получить в системе астатизм
первого порядка относительнозадающего
воздействия.
по отношению к единичной обратной связи
можно получить в системе астатизм
первого порядка относительнозадающего
воздействия.
Масштабирование входной или выходной величины
(также позволяет улучшить точность по отношению к управляющему воздействию) . Применяется для статических систем. Рассмотрим сис-
тему

Приведем её к виду
Включим на вход
масштабирующее устройство
![]() .
.
![]() На установившемся
режиме для статической
системы
На установившемся
режиме для статической
системы
![]() иy(t)=x(t),
т.е.
статическая
ошибка будет отсутствовать. Аналогичный
результат получается при включении
такого масштабирующего устройства на
выходе системы. Такое масштабирование
делается практически во всех статических
системах.
Однако этот вывод справедлив при К=const.
Если коэффициент усиления нестабилен,
то в системе будет статическая ошибка.
иy(t)=x(t),
т.е.
статическая
ошибка будет отсутствовать. Аналогичный
результат получается при включении
такого масштабирующего устройства на
выходе системы. Такое масштабирование
делается практически во всех статических
системах.
Однако этот вывод справедлив при К=const.
Если коэффициент усиления нестабилен,
то в системе будет статическая ошибка.
6.Комбинированное управление – один из способов повышения точности работы САУ, когда наряду с регулированием по ошибке используется регулирование по задающему или возмущающему воздействию.
Структурная схема комбинированного управления по управляющему воздействию:
Передаточная функция замкнутой САУ по управляющему воздействию будет:
![]() .
.
Передаточная функция по ошибке: (в общем случае)

![]() ,
,
![]() .
.
Т.о.
![]()
![]()
Для нашего случая:
![]() =
=![]()
![]() .
.
САУ является инвариантной по отношению к задающему воздействию, если после завершения переходного процесса, определяемого начальными условиями, ошибка системы не зависит от этого воздействия.
Следовательно,
чтобы САУ была инвариантна по отношению
к управляющему воздействию, надо, чтобы
![]() ,
т.е.
,
т.е.
![]() или
или
![]() -
это условие полной (абсолютной)
инвариантности системы по отношению к
управляющему воздействию.
-
это условие полной (абсолютной)
инвариантности системы по отношению к
управляющему воздействию.
Но
 . В реальных системах
. В реальных системах![]()
![]()
Это условие физической реализации систем, т.к. в системах преобладают инерционные свойства.
В условиях инвариантности имеем, что порядок числителя должен быть больше порядка знаменателя.
Таким образом, условие полной инвариантности- чисто теоретический вывод и полную независимость системы от управляющего воздействия осуществить нельзя, т.к. нужно вводить идеальную первую и высшие производные от задающего воздействия.
Известно, что точно можно получить только в некоторых случаях первую производную, а все остальные производные могут быть получены приближенно при помощи дифференцирующих звеньев. Поэтому практически может быть получена не полная, а частичная инвариантность.
Например, вводя первую производную от задающего воздействия в системе с астатизмом первого порядка, можно получить реакцию без ошибки на «линейку», т.е повысить степень астатизма на единицу относительно задающего воздействия.