

Aliev1-6 / Алиев А.А. №4 ☺ / Алиев А.А №4
.docxМинистерство образования и науки Российской Федерации

Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
Национальный минерально-сырьевой университет «Горный»
Отчет по лабораторной работе №4
По теме: Исследование САУ, оптимальной по быстродействию
Выполнил: студент гр. АПМ-11-2 ____________ /Алиев А.А. /
Проверил: ______________ / Котелева Н.И./
Санкт-Петербург
2014
Цель работы: исследование влияния параметров релейной позиционной системы управления на характеристики отработки заданных перемещений и определение значений параметров, обеспечивающих оптимальный режим по быстродействию.
-
Принципиальная схема системы управления.
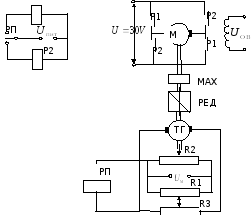
Рис.1. Принципиальная схема
На одном валу с
двигателем находятся: маховик МАХ,
редуктор РЕД, тахогенератор ТГ и
вращающийся потенциометр R2,
выполняющий роль датчика обратной связи
по положению. Величина необходимого
перемещения исполнительного органа
задается с помощью движка потенциометра
R1,
включенного вместе с потенциометром
R2
в мостовую схему, питаемую напряжением
 .
Тахогенератор ТГ является датчиком
скорости вращения двигателя М. С помощью
ТГ и потенциометра R3
образуется отрицательная обратная
связь по скорости двигателя. Таким
образом, исследуемая система является
двухконтурной, содержащая контура
скорости и положения.
.
Тахогенератор ТГ является датчиком
скорости вращения двигателя М. С помощью
ТГ и потенциометра R3
образуется отрицательная обратная
связь по скорости двигателя. Таким
образом, исследуемая система является
двухконтурной, содержащая контура
скорости и положения.
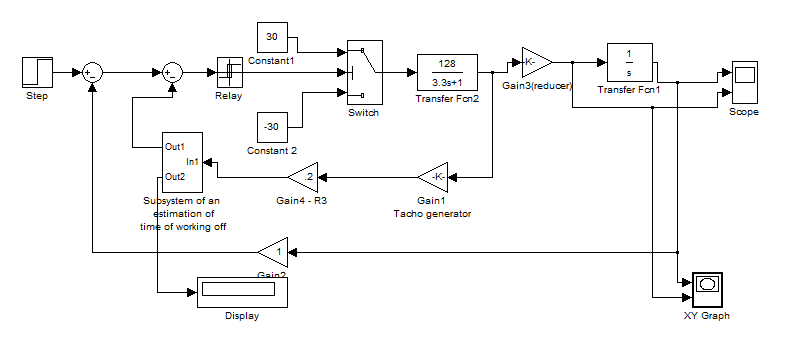
Рис.2 Компьютерная модель САУ
Компьютерная модель полностью повторяет структурную схему (Рис.2) в части цифровых значений параметров системы. Отличия от структурной схемы следующие.
Совмещенный узел
сравнения структурной схемы заменен
двумя раздельными узлами для удобства
контроля моментов реверса двигателя и
его отключения от источника напряжения.
Коэффициент
 представлен также двумя коэффициентами
усиления: Gain
1 моделирует коэффициент передачи
тахогенератора
представлен также двумя коэффициентами
усиления: Gain
1 моделирует коэффициент передачи
тахогенератора ,
Gain
4 эквивалентен потенциометру обратной
связи по скорости R3.
Переключатель Switch
с двумя
блоками Constant
1 и Constant
2 заменяет силовые реле Р1 и Р2.
,
Gain
4 эквивалентен потенциометру обратной
связи по скорости R3.
Переключатель Switch
с двумя
блоками Constant
1 и Constant
2 заменяет силовые реле Р1 и Р2.
Ход работы:
-
Установка значения параметра Gain 4 равным нулю (отсутствие в системе обратной связи по скорости) и наблюдение установления в системе автоколебаний.

Рис. 3 Автоколебания при отсутствии ОС по скорости
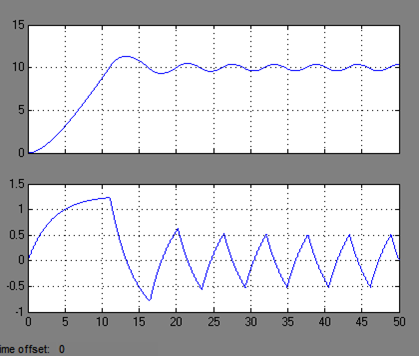
Рис. 4 Изменение скорости и угла поворота выходного вала двигателя
По графикам видно, что вторая кривая достигаем максимального значения – 1,25 и установившись имеет амплитуду – 0,5.
-
Установка значения параметра Gain 4 равным единице (максимальный коэффициент обратной связи по скорости) и наблюдение установления скользящего режима движения к равновесию.
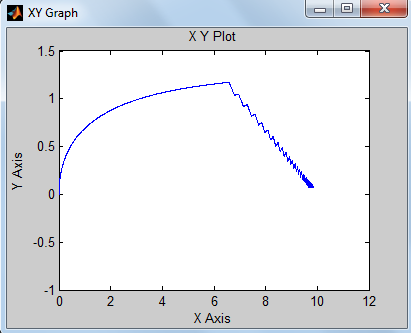
Рис. 5. Скользящий режим
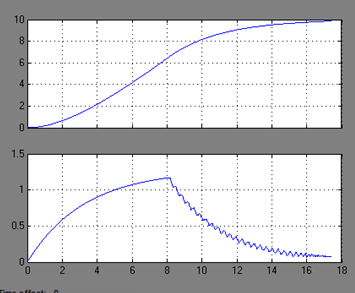
Рис. 6. Изменение скорости и угла поворота выходного вала двигателя
По графикам видно, что вторая кривая достигаем максимального значения – 1,2 и с увеличением времени – значение приближается к 0.
-
Определить значение коэффициента передачи Gain 4, соответствующее оптимальному режиму (отсутствие на фазовой плоскости скользящего и колебательного режимов).
В результате опыта установлено, что оптимальному режиму соответствует коэффициент передачи 0,2

Рис. 7. Оптимальный режим
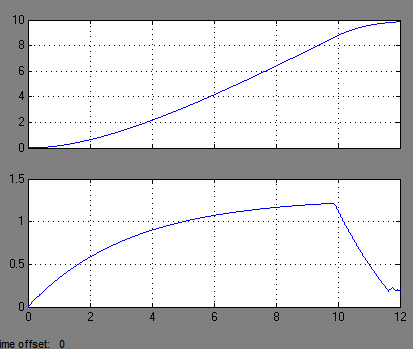
Рис. 8. Изменение скорости и угла поворота выходного вала двигателя
По графикам видно, что вторая кривая достигаем максимального значения – 1.2 и с увеличением времени – значение резко достигает значения 0.2.
-
Исследование влияния инерционности привода на параметры переходных процессов отработки заданного перемещения.
Увеличение постоянной времени в 2 раза привело к следующим изменениям:
При установке значения параметра Gain 4 равным нулю

Рис. 9 Автоколебания при отсутствии ОС по скорости
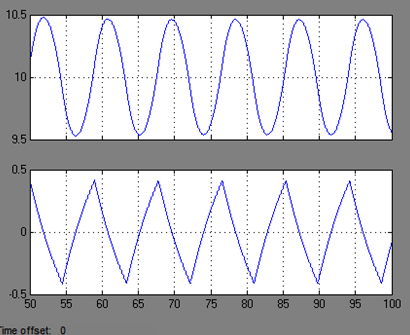
Рис. 10. Изменение скорости и угла поворота выходного вала двигателя
По графикам видно, что вторая кривая достигаем максимального значения – 1,2 и с увеличением времени – имеет амплитуду – 0,4
-
При установке значения параметра Gain 4 равным единице

Рис. 11. Скользящий режим
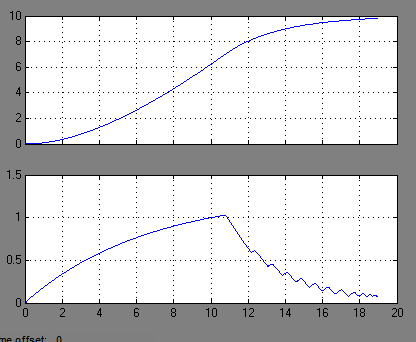
Рис. 12. Изменение скорости и угла поворота выходного вала двигателя
По графикам видно, что вторая кривая достигаем максимального значения – 1 и с увеличением времени – значение приближается к 0.
-
При установке значения параметра Gain 4 равным оптимальному (0,7):
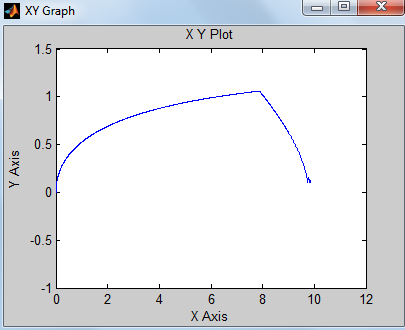
Рис. 13. Оптимальный режим
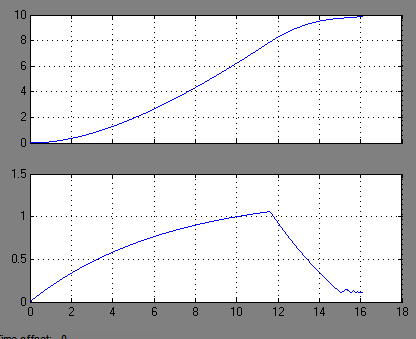
Рис. 14. Изменение скорости и угла поворота выходного вала двигателя
По графикам видно, что вторая кривая достигаем максимального значения – 1,1 и с увеличением времени – значение приближается к 0
-
Уменьшение постоянной времени в 2 раза привело к следующим изменениям:
При установке значения параметра Gain 4 равным нулю
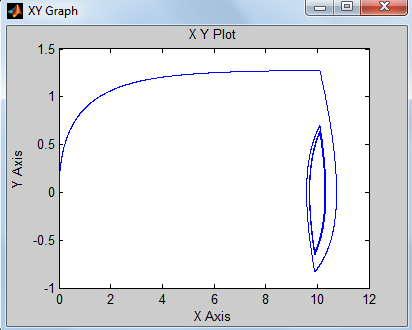
Рис. 15. Автоколебания при отсутствии ОС по скорости

Рис. 16. Изменение скорости и угла поворота выходного вала двигателя
По графикам видно, что вторая кривая достигаем максимального значения – 1,3 и с увеличением времени – имеет амплитуду – 0,6
-
При установке значения параметра Gain 4 равным единице
-
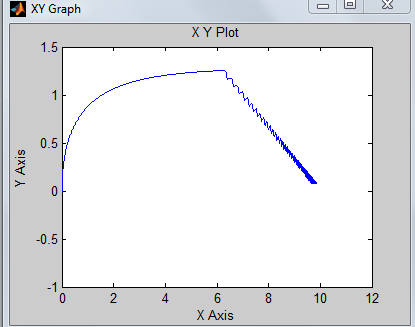
Рис. 17. Скользящий режим
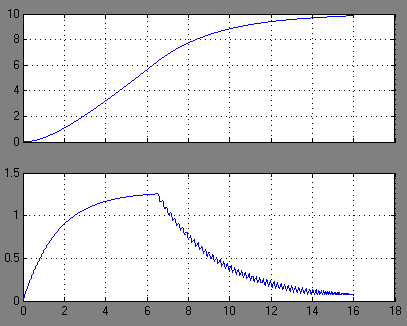
Рис. 18. Изменение скорости и угла поворота выходного вала двигателя
По графикам видно, что вторая кривая достигаем максимального значения – 1,3 и с увеличением времени – значение ступенчато приближается к 0
-
При установке значения параметра Gain 4 равным оптимальному (0,2):

Рис.19. Оптимальный режим

Рис. 20. Изменение скорости и угла поворота выходного вала двигателя
По графикам видно, что вторая кривая достигаем максимального значения – 1,3 и с увеличением времени – значение амплитуды устанавливается и равно – 0,4
-
Исследование влияния величины управляющего воздействия на настройку оптимального режима
При изменении значения Final value блока Step на 5 вольт оптимальное значение Gain4 составило 0.35:

Рис. 21. Оптимальный режим
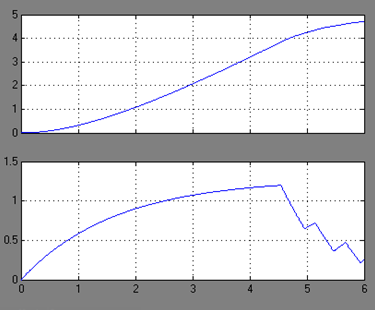
Рис. 22. Изменение скорости и угла поворота выходного вала двигателя
По графикам видно, что вторая кривая достигаем максимального значения – 1,3 и с увеличением времени резко приходит к значению – 0,2.
Вывод: в ходе проделанной работы, было исследовано влияния параметров релейной позиционной системы управления на характеристики отработки заданных перемещений. Время установления - пропорционально напряжению: чем напряжение в блоке Step меньше, тем меньше время установления. А при уменьшении напряжения питания двигателя – время установления растет.