

Aliev1-6 / Алиев А.А. №2 ☻ / Алиев А.А. №2
.docxМинистерство образования и науки Российской Федерации

Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
Национальный минерально-сырьевой университет «Горный»
Отчет по лабораторной работе
По теме: Исследование дискретной САУ с амплитудно-импульсной модуляцией
Выполнил: студент гр. АПМ-11-2 ____________ /Алиев А.А. /
Проверил: ______________ / Котелева Н.И./
Санкт-Петербург
2014
Цель работы: Ознакомиться с основами построения и функционирования дискретной системы управления непрерывным объектом с непрерывным датчиком обратной связи и дискретным ПИД-регулятором.
Выполнение работы:
В соответствии с вариантом задания в Matlab построим модель для изучения и изучим принцип действия каждого из девяти программных блоков подсистемы.
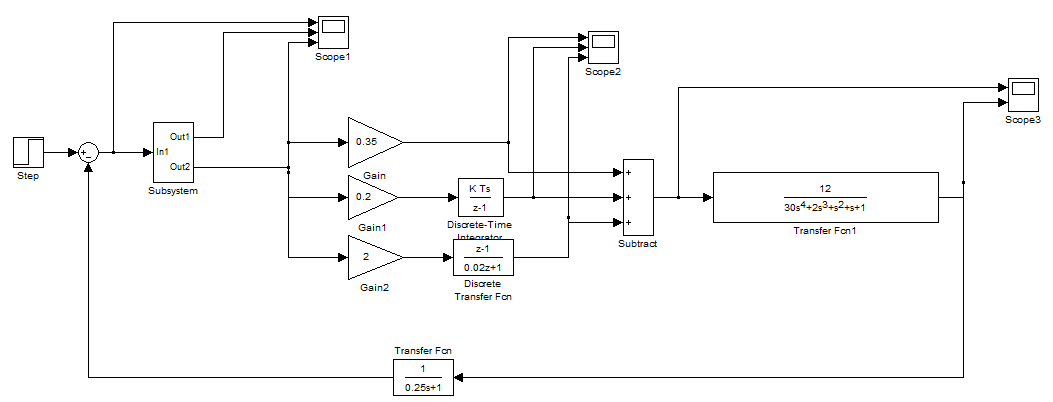
Рис. 1
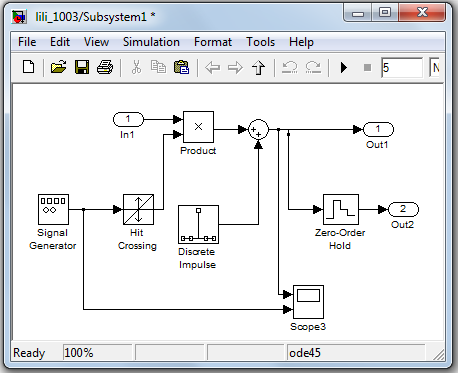
Рис. 2
Рассмотри каждый блок по отдельности:
-
Блок экстраполятор первого порядка Zero-Order Hold
Блок выполняет дискретизацию входного сигнала по времени

Рис. 3

Рис. 4
-
Блок экстраполятор первого порядка First-Order Hold
Блок задает линейное изменение выходного сигнала на каждом такте дискретизации, в соответствии с крутизной входного сигнала на предыдущем интервале.

Рис. 5
Рис. 6
-
Блок определения момента пересечения порогового значения Hit Crossing
Определяет момент времени, когда входной сигнал пересекает заданное пороговое значение.
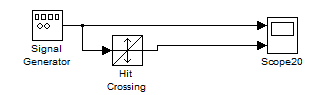
Рис. 7

Рис. 8
-
Subsystem – подсистемы
Подсистема это фрагмент Simulink-модели, оформленный в виде отдельного блока. Использование подсистем при составлении модели имеет следующие положительные стороны:
1. Уменьшает количество одновременно отображаемых блоков на экране, что облегчает восприятие модели.
2. Позволяет создавать и отлаживать фрагменты модели по отдельности, что повышает технологичность создания модели.
3. Позволяет создавать собственные библиотеки.
4. Дает возможность синхронизации параллельно работающих подсистем.
5. Позволяет включать в модель собственные справочные средства.

Рис. 9
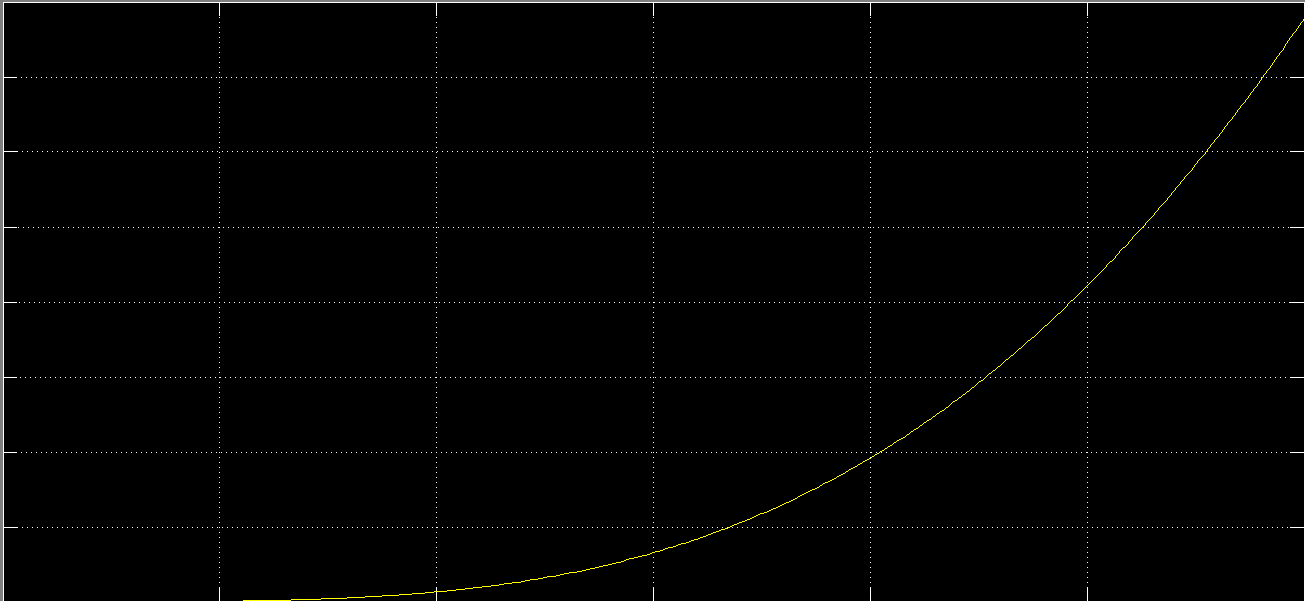
Рис. 10
-
Дискретная передаточная функция Discrete Transfer Fсn
Блок Discrete Transfer Fcn задает дискретную передаточную функцию в виде отношения полиномов
-
Блок дискретного интегратора Discrete-Time Integrator
Блок используется для выполнения операции интегрирования в дискретных системах
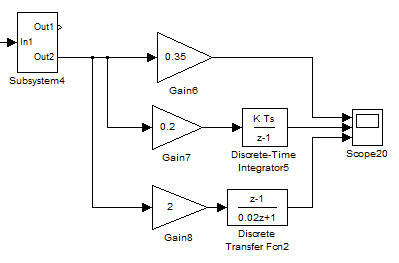
Рис. 11
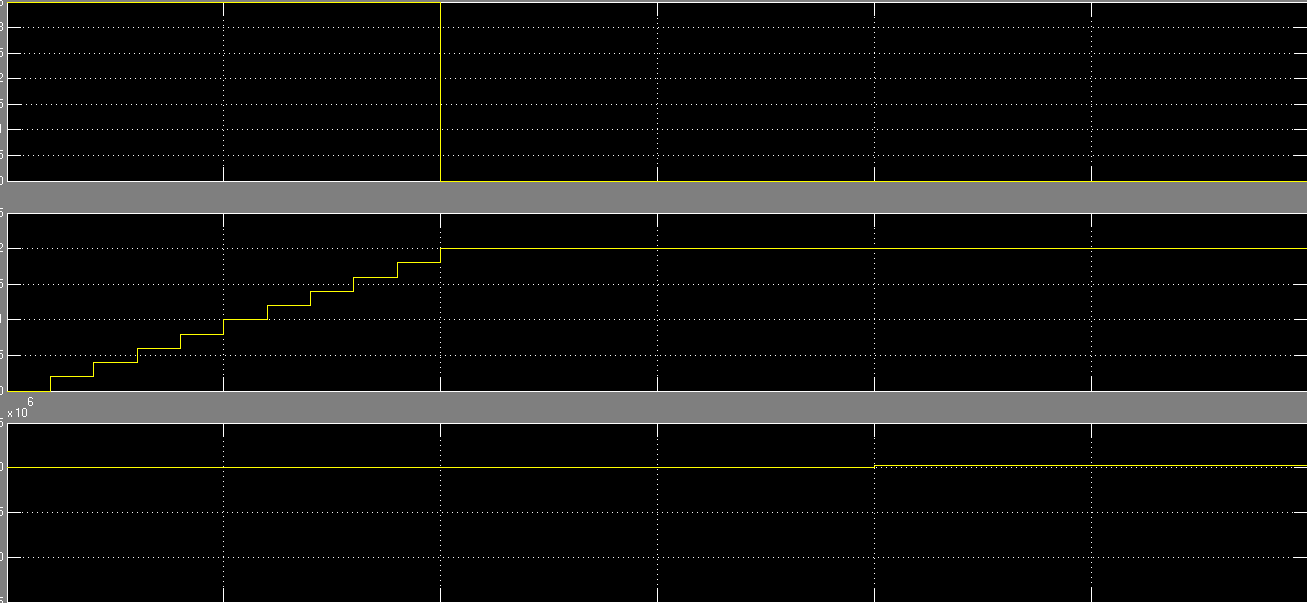
Рис. 12
-
Блок Transfer Fcn
Моделирует векторную передаточную функцию, которую можно интерпретировать как несколько передаточных функций имеющих одинаковые полиномы знаменателя, но разные полиномы числителя.
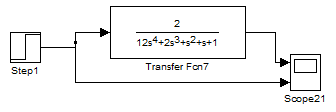
Рис. 13
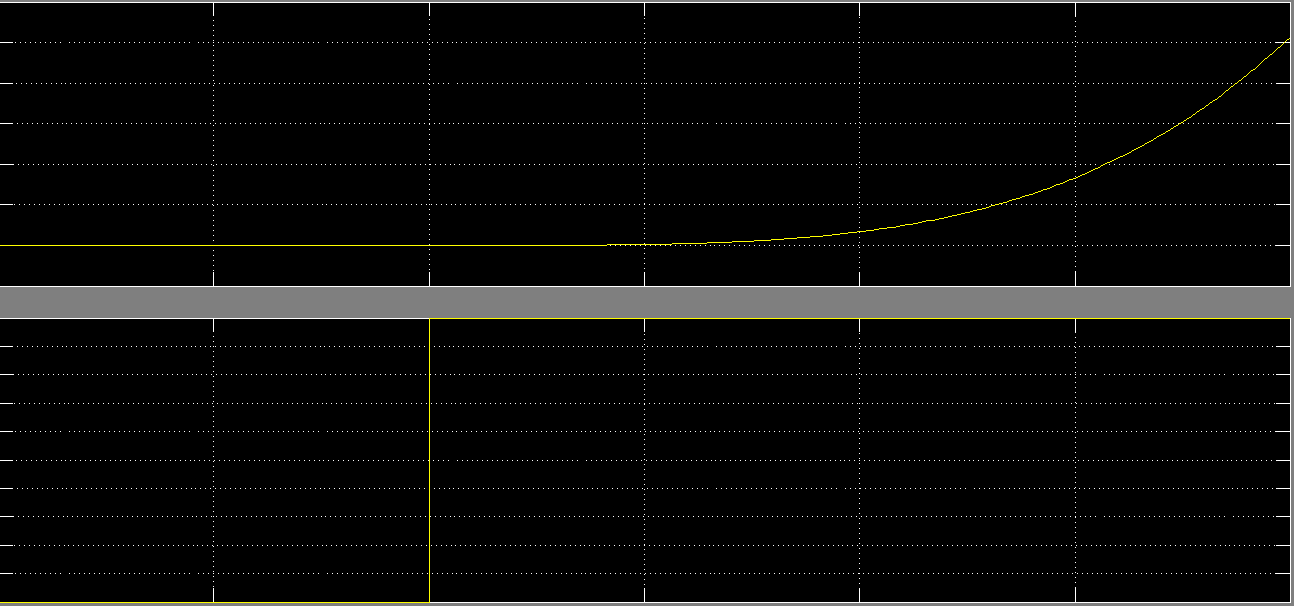
Рис. 14
-
Блок умножения Product
Выполняет вычисление произведения текущихзначений сигналов.
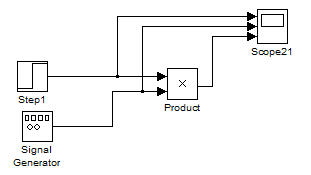
Рис. 15

Рис. 16