

22-05-2013_23-14-05 / КОНТРОЛЬНАЯ РАБОТА
.docx-
ОПРЕДЕЛЕНИЕ ВОЗМОЖНОСТИ ПРЕДОТВРАЩЕНИЯ

НАЕЗДА И АНАЛИЗ МЕХАНИЗМА ВОЗНИКНОВЕНИЯ
ПРОИСШЕСТВИЯ
При анализе ДТП вначале определяют удаление автомобиля Sуд . Рассматривая далее предположительную версию происшествия, вычисляется длина остановочного пути автомобиля Sо , и сравнивают ее с удалением Sуд. При SоSуд, можно дать заключение о том, что автомобиль при своевременно предпринятом интенсивном торможении остановился бы до линии следования пешехода.
Начальная скорость автомобиля может быть определена по формуле:
Va 0,5·t3 ·j+(2·Sю ·j)1/2, (1)
где t3 – время нарастания замедления, t3=0,3 сек;
j – максимальное замедление автомобиля, j=5,25 м/с2;
Sю
– длина следа юза автомобиля, Sю=8
м.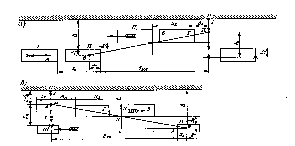
Va 0,5·0,3·5,25+(2·8·5,25)1/2=9,695 м/с.
Рис.1. Схема наезда на пешехода при обзорности, ограниченной
встречным транспортным средством
На рис.1 приведена
расчетная схема для экспертного
исследования наезда автомобиля А на
пешехода, вышедшего из-за встречного
автомобиля Б. Показатели, относящиеся
к автомобилю А, обозначены на схеме
индексом 1, а относящиеся к автомобилю
Б – индексом 2. Положение обоих
автомобилей, соответствующее началу
движения пешехода в опасной зоне,
отмечено цифрой I.
Некоторый промежуток времени пешеход
движется по проезжей части позади
автомобиля Б, оставаясь невидимым для
водителя автомобиля А. Оба автомобиля
за это время переместятся в соответствии
со своими скоростями: автомобиль А на
расстояние S1,
встречный автомобиль – на расстояние
S2.
Положение автомобилей в тот момент,
когда пешеход станет видимым водителю
автомобиля А, обозначено на рис.1 цифрой
II. Расстояние между автомобилем А и
линией следования пешехода в это время
составляет Sуд.
Из подобия треугольников обзорности получаем
(Sуд+ах-х- S2)·( Sп-у–lу) = (х+S2)·(у+ау). (2)
где Sуд – время удаления (видимости) пешехода;
ах и ау – положение водителя в легковом автомобиле, ах=1,9 м и аy=0,7м;
Δх – расстояние которое проехал автобус мимо пешехода, Δх=3м;
ly – расстояние от левой стороны автомобиля до места удара, ly=0.5 м;
Sп – перемещение пешехода в поле видимости водителя;
S2 – расстояние перемещения автобуса когда пешеход был невидим для водителя автомобиля;
Как пешеход, так и автомобили двигались равномерно, поэтому действительны следующие соотношения:
Sуд : Vа1 = Sп : Vп; (3)
S2 = (+lу-Sп)· Vа2: Vп =(+lу)·Vа2: Vп- Sуд·Vа2: Va1 , (4)
где – расстояние от границы проезжей части до полосы движения автомобиля А, Δ=4 м;
Va1 и Va2 – скорость автомобиля и автобуса соответственно, Va1=9,95 м/с и Va2=13 м/с;
Vп – скорость движения пешехода, Vп=0,5 м/с.
Подставив значения Sп и S2 в формулу (2), получаем:
Sуд·(1+Vа2: Va1)-(+lу)·Vа2: Vп+ ах-х:(у+ау)=
=х+(+lу)·Vа1: Vп- Sуд·Vа2: Va1:(Sуд·Vп: Va1-у–lу) . (5)
Решение уравнения
(5) дает расстояние Sуд.
Sуд·(1+13:9,69)-(4+0.5)·13:9,69+1,9-3:(1+0,7)=
=3+(4+0,5)·9,69:0,5- Sуд·13:9,69:(Sуд·0,5: 9,69-1–0,5);
0,077·Sуд2 – 2,1·Sуд – 85,85=0;
Sуд=49,6 м.
Длину остановочного пути автомобиля рассчитывают по формуле
So (t1 t2 0,5·t3)·Va Sю , (6)
где t1 – время реакции водителя,t1=1,2 с;
t2 - время запаздывания тормозного привода t2=0,15 с;
t3 – время нарастания замедления, t3=0,3 с;
Sю – длина следа юза автомобиля,Sю=8 м.
So 1,5·9,695+8=22,54 м.
Так как SоSуд, можно дать заключение о том, что автомобиль при своевременно предпринятом интенсивном торможении остановился бы до линии следования пешехода. Следовательно, у водителя имелась техническая возможность предотвратить наезд.
Перемещение пешехода в поле зрения водителя:
Sп=(Sуд/Vа)·Vп; (7)
Sп=(49,6/9,695)·0,5=2,6 м.
Время движения пешехода в поле зрения водителя
tвп = tп = Sп : Vп = (у + lу): Vп. (8)
tвп=2,6/0,5=5,2 с
Условие невозможности начала торможения:
tп Т.
Водитель имел техническую возможность в данной дорожной обстановке начать торможение, поскольку время движения пешехода в поле зрения водителя больше времени для начала полного торможения. Водитель несвоевременно принял меры по предотвращению ДТП.
Определим
возможность безопасного объезда
пешехода, двигавшегося перпендикулярно
движению автомобиля. При объезде пешехода
автомобилем принимается, что он сохраняет
те же, что и в процессе ДТП, темп и
направление движения, расчеты проводятся
применительно к маневру типа «смена
полосы движения» как имеющему наибольшее
практическое значение.
1


Lа
Sуд
2


Sп


lу


Bа


ΔB

Вдк

Vа
Ва
ΔB
Рис.2. Схема объезда пешехода
Минимальный безопасный интервал:
∆б=0,005∙Lа∙Vа, (9)
где Lа – длина автомобиля, Lа=4,76 м;
Vа – скорость автомобиля начальная, Vа=9,695 м/с.
∆б=0,005∙4,76∙9,695=0,231 м.
Ширина динамического коридора:
Вдк=(10∙Lа+36)∙Vа/1000+Ва; (10)
Вдк=(10∙4,76+36)∙9,695/1000+1,82=2,631 м.
Условие возможности выполнения маневра с учетом дорожной обстановки при объезде спереди:
Bдк≤Bд-Sп,-Sдоп; (11)
где Вд – ширина проезжей части в зоне наезда, Bдк=12 м;
Sп, - перемещение пешехода, Sп=4,5 м;
Условие
возможности выполнения маневра
выполняется:
2,631≤7,255
Коэффициент маневра:
Км=ам+bм∙Vа, (12)
где ам и bм – эмпирические коэффициенты, зависящие от состояния дорожного покрытия (для сухого асфальтобетона, φх=0,7-0,8; ам=1,12; bм=0,005).
Км=1,12+0,005∙9,695=1,168.
Поперечное смещение автомобиля, необходимое для безопасного объезда пешехода спереди:
yм=∆б+lу+Sдоп, (13)
где Sдоп – путь пешехода, за время проезда автомобиля мимо пешехода.
Sдоп=Lа∙Vп/Vа; (14)
Sдоп=4,76∙0,5/9,695=0,245 м.
yм=0,231+0,5+0,245=0,976 м.
Продольное перемещение автомобиля, теоретически необходимое для его смещения в поперечном направлении на yм, согласно формуле:
Хм=(8∙Vа2∙yм/(9,8∙φy))1/2; (15)
Хм=(8∙93,993∙0,976/(9,8∙0,7))1/2=10,343 м.
Перемещение автомобиля в продольном направлении, фактически необходимое для выполнения маневра при объезде пешехода:
Хф=Хм∙Км; (16)
Хф=10,343∙1,168=12,081 м.
Условие безопасного объезда пешехода:
хф≤Sуд-S1-S2p=Va∙(Sп/Vп-t1-t2p), (17)
где S1 – путь, пройденный автомобилем за время реакции водителя;
S2р – путь, пройденный автомобилем за время выборки зазоров в рулевом управлении.
хф=9,695∙(2,6/0,5-1,2-0,2)=36,841 м.
Водитель
имел возможность безопасного объезда
пешехода спереди при начатом своевременно
маневре, при условии, что на соседней
полосе движения отсутствуют транспортные
средства, осуществляющие движение и
легковой автомобиль двигался без
изменения скорости.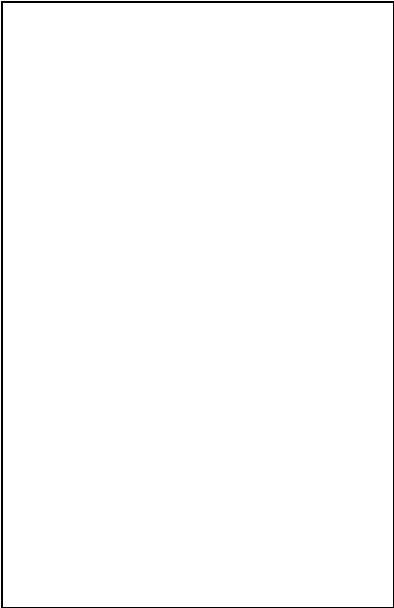
2. ВЫВОДЫ ПО МЕХАНИЗМУ ВОЗНИКНОВЕНИЯ
ДОРОЖНО – ТРАНСПОРТНОГО ПРОИСШЕСТВИЯ
Разобрав все пункты анализа дорожно-транспортного происшествия можно прийти к выводу, что у водителя была возможность предотвратить ДТП. Поскольку длина остановочного пути автомобиля меньше расстояния удаления автомобиля от пешехода, то при своевременно предпринятом интенсивном торможении остановился бы до линии следования пешехода. Следовательно, у водителя имелась техническая возможность предотвратить наезд. Поскольку время, которое пешеход был в поле зрения водителя больше суммарного времени, необходимого для начала полного торможения автомобиля, водитель несвоевременно принял меры по предотвращению ДТП. Водитель имел возможность безопасного объезда пешехода спереди при начатом своевременно маневре, при условии, что на соседней полосе движения отсутствуют транспортные средства, осуществляющие движение и легковой автомобиль двигался без изменения скорости.
СПИСОК
ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ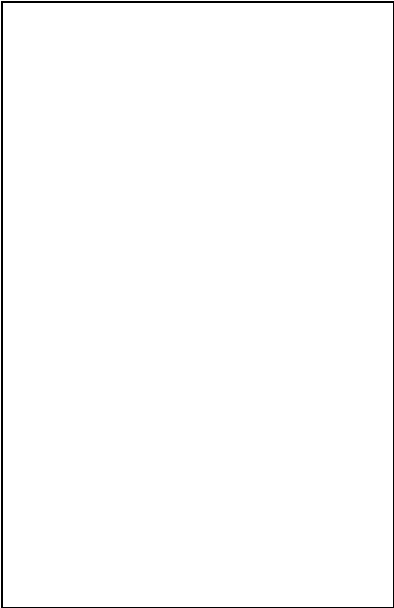
1. Коноплянко, В.И. Организация и безопасность движения /В.И. Коноплян ко. – М.: Высшая школа, 2007.
2. Горев, А.Э. Организация автомобильных перевозок и безопасность движения /А.Э. Горев, Е.М. Олещенко. – М.: Академия, 2006.
3. Безопасность перевозочного процесса: Рабочая программа, задания на контрольную работу, методические указания к выполнению контрольной работы - СПб.: Изд-во НМСУ (Горный университет), 2012. - с.

