

ФИЗИКА3 БОЛЬШЕ ГОТОВОГО1 / 1-st / Механика / 15 / Морошкин.П.В / 15+
.docМинистерство образования Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В.Плеханова
(технический университет)
Кафедра общей и технической физики СПГГИ (ТУ).
Отчет по лабораторной работе № 15.
«Гироскоп и его свойства »
Автор: студент гр.- РМ-02-1/ Кузнецов М.А.
Оценка: _____________
Дата:________________
Проверил: Морошкин.П.В. /_________/
Санкт-Петербург
2003 г.
Изучение прецессии гироскопа. (Работа №15)
Цель работы – экспериментально исследовать основные свойства гироскопа, изучить законы вращательного движения твёрдого тела.
1.Теоретическое обоснование.
Гироскопом называют массивное симметричное тело, вращающееся с большой скоростью вокруг оси симметрии. Основное свойство гироскопа - способность сохранять неизменное направление оси вращения при отсутствии действующего на него момента внешних сил.
Гироскопы широко применяются в технике: в качестве указателей направления при движении судов, самолетов и т.д. В применении гироскопа важнейшую роль играет его св-во под названием регулярная прецессия.
Регулярной прецессией гироскопа называют явление вращения оси симметрии гироскопа вокруг неподвижной вертикальной оси с постоянной угловой скоростью угловой скоростью
( = / t где -угол поворота оси за время t) за счет действия момента Мвнеш относительно неподвижной точки О, принадлежащий оси симметрии гироскопа называемой центром подвеса гироскопа.
Если центр подвеса совпадает с центром тяжести гироскопа, то такой гироскоп называется уравновешенным: действие на него силы тяжести не называет изменения состояния его вращения. В противном случае гироскоп называется тяжелым, под действием момента силы тяжести относительно центра подвеса тяжелый гироскоп начинает вращаться равномерно вращаться вокруг этой точки.
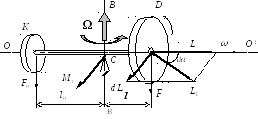
2. Описание установки.
Подвижный элемент гироскопа представляет собой массивный маховик (диск), закреплённый на оси электродвигателя. Вдоль оси маховика закреплена планка с линейной метрической шкалой. Вдоль планки может перемещаться противовес.
Угол поворота оси двигателя в горизонтальной плоскости и время движения измеряются электронной схемой с фотоэлектрическим датчиком. Кроме того, угол поворота гироскопа можно считывать по нанесенной на основании подвижной части угловой шкале.
3. Расчетные формулы.
3.1 Момент инерции гироскопа:
![]()
где Jk-момент инерции,
m- масса подвеса,
g= 9,81 m/c2
l0 -расстояние от центра масс противовеса до оси вращения,
- угловая скорость вращения,
![]() среднее значение угловой скорости
прецессии гироскопа.
среднее значение угловой скорости
прецессии гироскопа.
![]()
где
![]() -среднее
значение момента инерции
-среднее
значение момента инерции
3.2 Угловая скорость вращения:
= / t
![]()
где
![]() -
среднее значение угловой скорости
прецессии гироскопа
-
среднее значение угловой скорости
прецессии гироскопа
- угол поворота гироскопа за время t.
3.3 Погрешности.
1.1 Расчет погрешности производится по графику. (см. ниже)
1.2 Расчет погрешности J:
J=![]()
![]()
4. Расчет результатов и погрешностей.
![]() =0,001931886кг
м2 , m=0,1 кг,
=0,001931886кг
м2 , m=0,1 кг,
![]() =
0,000218992кг
м2
=
0,000218992кг
м2
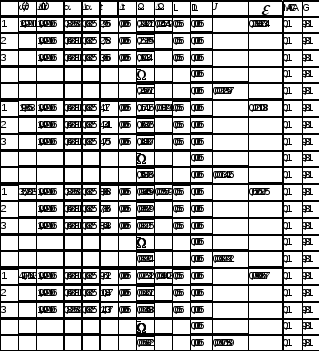
4.2 Измерение погрешности вычисления угловой скорости прецессии по разбросу результатов.
Погрешность при измерениях 1-4
|
|
1 |
2 |
3 |
4 |
|
|
104,9291 |
199,3653 |
325,2803 |
419,7164 |
|
|
0,0245 |
0,0138 |
0,0136 |
0,0149 |
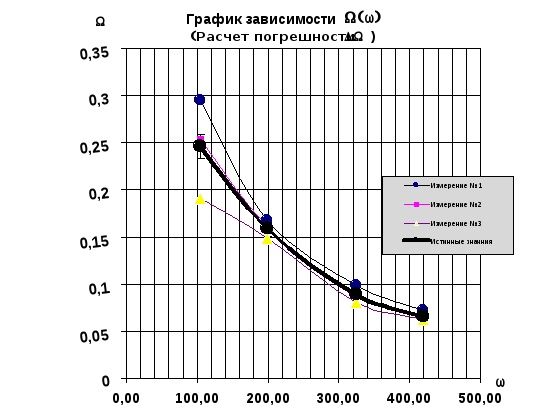
5 График зависимости .
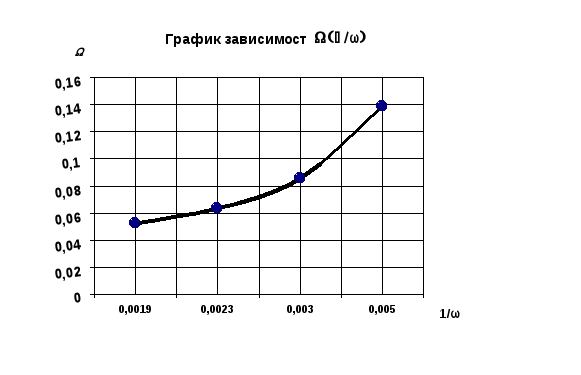
Вывод
Из графика видно, что угловая скорость прецессии гироскопа обратно пропорциональна его угловой скорости вращения т.е. чем медленней вращается тяжелый гироскоп тем быстрее он прецессирует и наоборот.
В результате
вычислений получили момент инерции
![]() =(0,001931886±0,000218992)
кг м2.
=(0,001931886±0,000218992)
кг м2.