

ФИЗИКА3 БОЛЬШЕ ГОТОВОГО1 / 1-st / Механика / 15 / 15 Мой!
.doc
Федеральное агентство по образованию Российской Федерации
Санкт-Петербургский Государственный Горный Институт им. Г.В. Плеханова
(технический университет)
Отчёт по лабораторной работе № 15
По дисциплине: Физика
(наименование учебной дисциплины согласно учебному плану)
Тема: Изучение прецессии гироскопа.
Выполнил: студент гр. ВД-05___________ / Симаков С.В./
(подпись) (Ф.И.О.)
ОЦЕНКА: _____________
Дата: __________________
ПРОВЕРИЛ:
Доцент: ___________________ / Чернобай В.И. /
(подпись) (Ф.И.О.)
Санкт-Петербург
2005 год
Цель работы: экспериментально исследовать основные свойства гироскопа и зависимость угловой скорости прецессии от угловой скорости вращения гироскопа.
Краткое теоретическое обоснование
1. Явление, лежащее в основе работы – вращательное движение.
2. Гироскопом - называют массивное симметричное тело, вращающееся с большой скоростью вокруг оси симметрии.
Основное свойство гироскопа – способность сохранять неизменным направление оси вращения при отсутствии действующего на него момента внешних сил.
Момент инерции
- тела
является мерой инертности тела при
вращательном движении Рассмотрим
гироскоп, который с большой скоростью
вращается вокруг своей оси симметрии.
Поскольку момент инерции диска
относительно его оси симметрии есть
величина постоянная, то вектор угловой
скорости также остается постоянным как
по величине, так и по направлению. Вектор
![]() направлен по оси вращения в соответствии
с правилом правого винта. Таким образом,
ось свободного гироскопа сохраняет
своё положение в пространстве неизменным.
направлен по оси вращения в соответствии
с правилом правого винта. Таким образом,
ось свободного гироскопа сохраняет
своё положение в пространстве неизменным.
Моментом импульса механической системы относительно оси называется проекция на эту ось вектора момента импульса системы относительно любой точки, выбранной на рассматриваемой оси.
Момент силы – проекция вектора силы на ось вращения.
Регулярной прецессией гироскопа - называют явление вращения оси симметрии гироскопа вокруг неподвижной вертикальной оси.
Нутации – это такое движение, при котором наличие сил трения приводит к тому, что угол наклона оси гироскопа будет постоянно изменяться.
3. Закон
сохранения момента импульса -
импульс L
замкнутой системы не изменяется с
течением времени, т.е.
![]() ,
который справедлив в результате того,
что система находится в равновесии
(результирующий момент силы, действующий
на систему, равен нулю)
,
который справедлив в результате того,
что система находится в равновесии
(результирующий момент силы, действующий
на систему, равен нулю)
В данном случае
![]()
J - момент инерции
гироскопа (![]() )
)
![]() - собственная угловая скорость вращения
гироскопа (рад/с)
- собственная угловая скорость вращения
гироскопа (рад/с)
4. В ходе
лабораторной работы мы должны будем
ознакомиться с основными свойствами
гироскопа и изучить зависимость угловой
скорости прецессии от угловой скорости
вращения гироскопа. Теория и опыт
показывают, что угловая скорость
прецессии тем больше, чем больше масса
подвешенного груза. Это справедливо
лишь для быстрого вращающегося гироскопа
(![]() ).
).
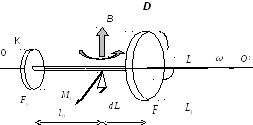
С d B 







![]()






![]()
С
- угловая скорость прецессии гироскопа (рад/с);
t - время поворота гироскопа (с);
- угол поворота гироскопа (рад);
ω - угловая скорость вращения гироскопа (с-1);
l0 - расстояние от центра до противовеса К (м);
l - расстояние от центра масс до диска гироскопа (м);
L - момент импульса (кг∙м2/с);
OO’-горизонтальная ось;
D - вращательный диск;
К - противовес;
BB’ - вертикальная ось.
Основные расчетные формулы
![]() - угловая скорость прецессии гироскопа,
где
- угол поворота гироскопа;
- угловая скорость прецессии гироскопа,
где
- угол поворота гироскопа;
![]() -
среднее время поворота.
-
среднее время поворота.
![]()
![]() - момент инерции
гироскопа, где F1
– сила тяжести; l
- расстояние
от центра масс до диска гироскопа; ω
- угловая скорость вращения гироскопа;
- угловая
скорость прецессии гироскопа.
- момент инерции
гироскопа, где F1
– сила тяжести; l
- расстояние
от центра масс до диска гироскопа; ω
- угловая скорость вращения гироскопа;
- угловая
скорость прецессии гироскопа.
![]()
F1=mg – сила тяжести, где m - масса груза, g - ускорение свободного падения.
Основные формулы расчёта погрешностей
![]() - абсолютная
погрешность косвенных измерений угловой
скорости прецессии гироскопа, где
- абсолютная
погрешность косвенных измерений угловой
скорости прецессии гироскопа, где
![]() -
погрешность измерения угла поворота;
-
погрешность измерения угла поворота;
![]() -
погрешность измерения времени поворота
гироскопа.
-
погрешность измерения времени поворота
гироскопа.
![]()
![]() - абсолютная
погрешность косвенных измерений момента
инерции гироскопа, где
- абсолютная
погрешность косвенных измерений момента
инерции гироскопа, где
![]() -
момент инерции гироскопа,
-
момент инерции гироскопа,
![]() -
масса груза,
-
масса груза,
![]() -
погрешность измерения угловой скорости
вращения гироскопа,
-
погрешность измерения угловой скорости
вращения гироскопа,
![]() - погрешность измерения расстояния от
центра масс до диска гироскопа,
- погрешность измерения расстояния от
центра масс до диска гироскопа,
![]() - погрешность измерения массы груза.
- погрешность измерения массы груза.
![]()
Таблица 1.
|
Физ. величина |
ω1 |
Δ ω |
α |
Δα |
t1 |
Δt |
Ω1 |
ΔΩ1 |
J1 |
ΔJ |
|
Ед.измер. № опыта |
об/с |
об/с |
град |
град |
с |
с∙10-3 |
Рад/с |
Рад/с |
кг·м2 |
кг·м2 |
|
1 |
16,7
|
1,67 |
60 |
10 |
3,883 |
1
|
0,270 |
0,044
|
0,036 |
0.0003 |
|
3,922 |
0,267 |
|||||||||
|
4,035 |
0,259 |
|||||||||
|
3,899 |
0,268 |
|||||||||
|
|
|
|||||||||
|
3,934
|
0,266 |
|||||||||
|
|
ω 2 |
Δ ω |
α |
Δα |
t2 |
Δt |
Ω2 |
ΔΩ2 |
J2 |
ΔJ |
|
2
|
33,3 |
1,67
|
60 |
10 |
7,819 |
1
|
0,134 |
0,022
|
0,037 |
0.00027 |
|
8,457 |
0,124 |
|||||||||
|
8,299 |
0,126 |
|||||||||
|
7,839 |
0,134 |
|||||||||
|
|
|
|||||||||
|
8,103
|
0,129 |
|||||||||
|
|
ω 3 |
Δ ω |
α |
Δα |
t3 |
Δt |
Ω3 |
ΔΩ3 |
J3 |
ΔJ |
|
3
|
50 |
1,67 |
60
|
10 |
11,575 |
1
|
0,090 |
0,015
|
0,034 |
0.00026 |
|
11,777 |
0,089 |
|||||||||
|
10,635 |
0,098 |
|||||||||
|
11,099 |
0,094 |
|||||||||
|
|
|
|||||||||
|
11,271
|
0,093 |
|||||||||
|
|
ω 4 |
Δ ω |
α |
Δα |
t4 |
Δt |
Ω4 |
ΔΩ4 |
J4 |
ΔJ |
|
4
|
66,7 |
1,67
|
60
|
10
|
18,290 |
1
|
0,057 |
0,011
|
0,036 |
0.00024 |
|
15,143 |
0,069 |
|||||||||
|
14,578 |
0,072 |
|||||||||
|
14,170 |
0,074 |
|||||||||
|
|
|
|||||||||
|
15,545
|
0,067 |
Пример расчетов результатов эксперимента
Расчет значений для первой строки таблицы 1
Найдем среднее значение времени
![]()
![]()
![]()
![]()
F1 = mg = 0, 1∙9,8 = 0,98 (Н)
![]()
![]()
Пример расчета погрешности
![]()
![]()
![]()
![]()
![]()
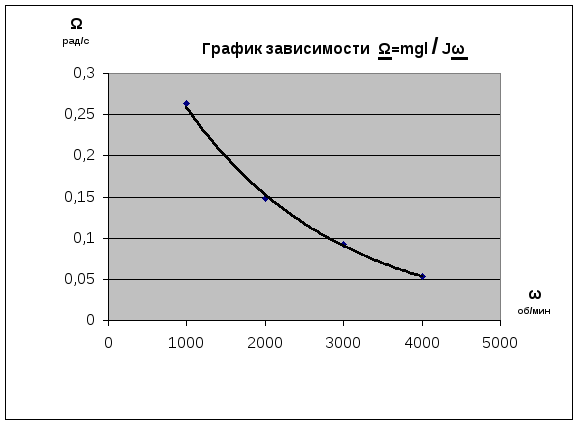
График зависимости W от w
Окончательный результат
![]()
![]()
Вывод
Исследовав гироскоп был рассчитан его
момент инерции, величина которого
составила:
![]() .
В результате опыта было установлено,
что при малых углах поворота, с увеличением
собственной скорости вращения гироскопа,
уменьшается угловая скорость прецессии.
.
В результате опыта было установлено,
что при малых углах поворота, с увеличением
собственной скорости вращения гироскопа,
уменьшается угловая скорость прецессии.