

Разработка алгоритма распознавания базовых движенийFlip
При разработке алгоритма распознавания базовых движений типа Flip следует привязываться к неким величинам, которые независимы от модуля суперпозиции вектора гравитации и линейного ускорения, и модуля магнитного поля, так как эти величины изменяемы во времени из-за наличия линейных ускорений и перемещения тел с большой собственной магнитной массой. Такими величинами будут являться углы поворота проекций модуля вектора гравитации и линейного ускорения, и модуля магнитного поля на плоскости XY, XZ и YZ относительно осей Y,X и Z соответственно.
Введём несколько обозначений:
|A| - модуль суперпозиции вектора гравитации и линейного ускорения
|M| - модуль вектора магнитного поля
|Ax| - проекция суперпозиции вектора гравитации и линейного ускорения на ось XZ
|Ay| - проекция суперпозиции вектора гравитации и линейного ускорения на ось XY
|Az| - проекция вектора магнитного поля на ось XZ
|Mx| - проекция вектора магнитного поля на ось XZ
|My| - проекция вектора магнитного поля на ось XY
|Mz| - проекция вектора магнитного поля на ось XZ
Пусть
![]() ax,
ax,
![]() ay,
и
ay,
и![]() az
– углы отклонения проекций вектора A
и
az
– углы отклонения проекций вектора A
и
![]() mx,
mx,
![]() my,
и
my,
и
![]() mz
– углы
отклонения проекций вектора М.
mz
– углы
отклонения проекций вектора М.
Основу алгоритма распознавания базовых движений типа Flip составляет - вычисление площадей отдельных участков осциллограмм углов отклонения между двумя ближайшими пересечениями нулевой отметки, и сравнения их с эталонными. При пересечении осциллограммой нулевой точки начинается суммирование углов отклонения и подсчёт времени суммирования углов осциллограммы, которые принадлежат данной сумме. Время подсчёта измеряется в количестве опросов модуля ИС. Суммы считаются отдельно для каждого из 6 сенсоров. Как только осциллограмма ещё раз пересекает нулевую точку, то все текущие показания площадей и времён подсчёта сверяются с эталонными. Сравнение производится отдельно для показаний акселерометров и показаний магнитных сенсоров. Если обнаруживается совпадение с определёнными допусками, то генерируется событие, и обнуляются все показатели площади и времени. Иначе обнуляется только показатель той площади, где было пересечение нуля. Построенный на такой методике алгоритм действует следующим образом:
Снимаются показания с модуля.
Если timeout не равен нулю, то уменьшаем его на единицу и переходим к пункту 9. Иначе переходим к пункту 3
Вычисляются углы отклонения
 ax,
ax,
 ay,
ay,
 az
,
az
,
 mx,
mx,
 my,
и
my,
и
 mz
mzПрибавляются значения углов к площадям Sax, Say, Saz, Smx, Smy и Smz соответственно.
Проверяется наличие пересечений по каждому из углов, и если пересечения есть, переходим к пункту 6 иначе к пункту 9.
Проверяем текущие показания площадей и времени их замера с эталонными, отдельно для акселерометров и отдельно для магнитных сенсоров и если есть совпадения переходим к пункту 7, иначе к пункту 9.
Генерируем событие совершения базового движения.
Обнуляем площадь и время всех показателей и переходим к пункту 10.
Обнуляем площадь и время показателя, который перешел через ноль. И выставляем timeout выделения базовых движений.
Передаём управление вызвавшей алгоритм программе.
Данный алгоритм выполняется циклически при опросе инерционным приложением модуля ИС. Схема алгоритма выделения базовых движений приведена на Рис. 4 .24.
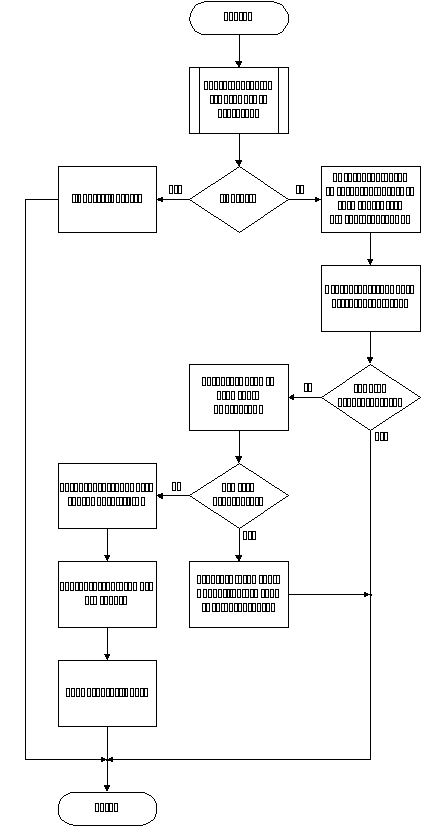
Рис. 4.24 Схема алгоритма выделения базовых движений Flip