

Микроконтроллер
В качестве микроконтроллера будем использовать микросхему AT89S8252 фирмы Atmel. Это высокопроизводительный, низкопотребляющий, восьмибитный CMOS микроконтроллер. Основными характеристиками которого являются:
100000 Циклов перезаписывания
От 4 до 6В рабочий диапазон.
Диапазон частот от 0 до 24МГц
Три уровня запирания памяти
256*8 бит внутренняя ОЗУ
32 Программируемых линий ввода/вывода
Низкое потребление
Восстановление в рабочий режим по прерыванию
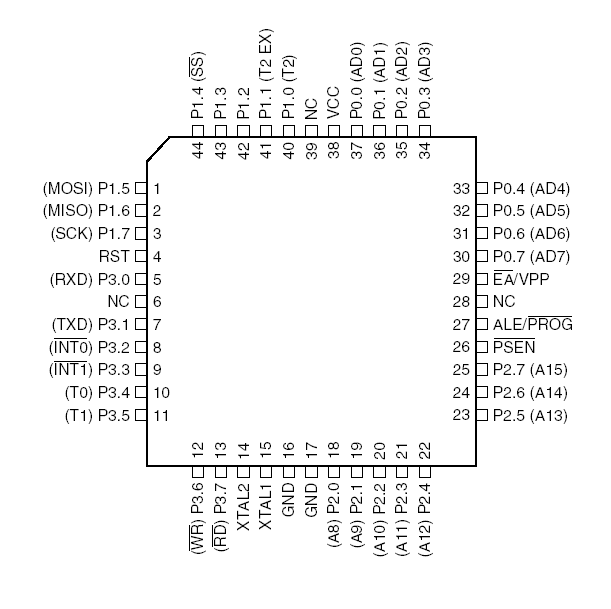
Рис. 2.14 Микросхема AT89S8252, вид сверху
Описание выводов:
VCC – напряжение питания.
GND – общий.
Port 0 – открытый, двунаправленный восьмибитный порт ввода/вывода. Порт 0 может быть настроен для работы с совмещённой шиной адреса и данных.
Port 1 – восьмибитный двунаправленный порт с внутренней подтяжкой до третьего состояния.
Port 2 - восьмибитный двунаправленный порт с внутренней подтяжкой до третьего состояния. Используется как порт адреса.
Port 3 – восьмибитный двунаправленный порт ввода-вывода с подтяжкой до третьего состояния. Также можут быть использован для передачи информации по последовательному каналу.
RST – Сброс.
ALE/PROG – Address Latch Enable.
PSE – читает строб в память программы.
EA/VPP – Включение внешнего адреса.
XTAL1 – вход инвертирующего усилителя.
XTAL2 – выход из инвертирующего усилителя.
Таблица 2.18
Описания дополнительных функций выводов порта 1 и 3микросхемы AT89S8252
|
Мнемоника |
Описание |
|
P1.0 |
Т2 синхо выход |
|
P1.1 |
Т2 дополнительный синхро выход |
|
P1.4 |
Выход выбора подчиненного порта |
|
P1.5 |
Главный выход данных, подчиненный вход данных для SPIканала |
|
P1.6 |
Главный вход данных, подчиненный выход данных для SPIканала |
|
P1.7 |
Главный выход синхронизации, подчиненный выход синхронизации для SPIканала |
|
P3.0 |
RXD (для последовательного канала) |
|
P3.1 |
TXD (для последовательного канала) |
|
P3.2 |
Внешнее прерывание 0 |
|
P3.3 |
Внешнее прерывание 1 |
|
P3.4 |
Таймер 0, внешний вход |
|
P3.5 |
Таймер 1, внешний вход |
|
P3.6 |
Строб записи |
|
P3.7 |
Строб чтения |
Принцип работы модуля инерционного сенсора
ПЛИС генерирует на выход сигнала сброса сигнал «меандр», схема сброса по положительным и отрицательным фронтам этого сигнала подаёт на вход сброса магниторезистивного сенсора сигнал с большим током, заставляя домены магниторезистивного сенсора переориентироваться в одном направлении. В промежутки времени между положительными и отрицательными фронтами сигнала сброса ПЛИС с частотой 2кГц опрашивает последовательно магниторезистивный сенсор, первый и второй акселерометры и температурный датчик , записывая их показания в 7 12-и разрядных регистров.
Регистр оси Х магниторезистивного сенсора.
Регистр оси Y магниторезистивного сенсора.
Регистр оси Z магниторезистивного сенсора.
Регистр оси X акселерометров.
Регистр оси Y акселерометров.
Регистр оси Z акселерометров.
Регистр показаний температуры.
Сразу после включения схемы ПЛИС подаёт на масштабирующие входы магниторезистивного сенсора калибровочные коэффициенты, необходимые для масштабирования и линейного выравнивания показаний магниторезистивного сенсора.
Микроконтроллер с частотой 2кГц производит считывание данных из первых 6-и вышеупомянутых регистров ПЛИС. Проводит масштабную и линейную корректировку показаний акселерометров. Раз в минуту микроконтроллер производит считывание показаний температурного датчика и использует его показания для температурной корректировки показаний акселерометров и магниторезистивных сенсоров в соответствии с таблицей поправок зашитой в микроконтроллере. После снятия и корректировки показаний акселерометров и магниторезистивных сенсоров, микроконтроллер производит первичную фильтрацию этих показаний алгоритмом скользящего среднего, с размеров скользящего окна равным 16.
При поступлении сигнала с интерфейса RS-232C микроконтроллер проверяет присланный байт. Если он равен 55h, то микроконтроллер начинает последовательно отсылать корректированные и отфильтрованные показания акселерометров и магниторезистивных сенсоров через интерфейс RS-232C в КПК. Последовательность посылки такая:
Первые 8 бит показаний оси X магниторезистивного сенсора.
Последние 4 бита показаний оси X магниторезистивного сенсора дополненные нулями в старших разрядах.
Первые 8 бит показаний оси Y магниторезистивного сенсора.
Последние 4 бита показаний оси Y магниторезистивного сенсора дополненные нулями в старших разрядах.
Первые 8 бит показаний оси Z магниторезистивного сенсора.
Последние 4 бита показаний оси Z магниторезистивного сенсора дополненные нулями в старших разрядах.
Первые 8 бит показаний оси X акселерометров.
Последние 4 бита показаний оси X акселерометров дополненные нулями в старших разрядах.
Первые 8 бит показаний оси Y акселерометров.
Последние 4 бита показаний оси Y акселерометров дополненные нулями в старших разрядах.
Первые 8 бит показаний оси Z акселерометров.
Последние 4 бита показаний оси Z акселерометров дополненные нулями в старших разрядах.