

Пример 4 — автомат Мура
Асинхронный автомат Мура, выделяющий первый полный импульс из последовательности UИ1, если приходит сигнал запускаUS; и вторую полную паузуUП1, если приходит сигнал запускаUZ(см. рис. 3.5).
Автоматы Мураописываются функциями переходов и выходов:
![]() ,
,
![]() ,
,
т.е. каждое новое состояние обусловлено предшествующим состоянием и входным сигналом, а выход в каждый момент однозначно определяется состоянием автомата. Таким образом, выходы однозначно определяются состояниями автомата и поэтому могут быть указаны в вершинах графа.
Составим граф
переходов устройства, разрабатываемого
как автомат Мура (см. определение выше).
Вершины графа (устойчивые состояния
автомата) будем кодировать противогоночно
(с использованием кода Грея). Исходное
состояние автомата 000. Выход из него
осуществляется либо по управляющему
сигналу Sи паузе в
последовательности, либо по управляющему
сигналуZи импульсу в
последовательности. Такая привязка
осуществляется, т.к. в первом случае
необходимо выделить 1-ыйполныйимпульс, а во втором случае — 2-уюполнуюпаузу. Указанные комбинации сигналов
дают начало двум путям переходов автомата
из состояния 000, показанным на рис. 3.8
стрелками. В конце необходимо предусмотреть
возврат автомата в исходное состояние,
который обычно осуществляется при
окончании действия управляющих сигналов
(![]() ).
).
Охватим замкнутой линией все состояния на графе переходов, в которых значения одной и той же переменной (состояние одного элемента памяти) равны 1. Эти замкнутые кривые показаны сплошной (Q1=1), штрих-пунктирной (Q2=1) и пунктирной линиями (Q3=1) соответственно.
Поскольку вход в подобную замкнутую область и выход из нее требуют линий сигналов возбуждения, обозначаются соответствующие сигналы возбуждения. Стрелками, входящими в область, указывают возбуждение установки (присваивающее переменной единичное значение), а стрелками, выходящими из области, — возбуждение сброса (присваивающее ей нулевое значение).
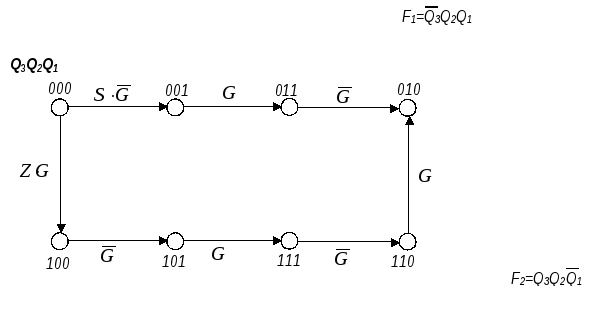
Рисунок 3.8 — Граф переходов асинхронного автомата МУРА
Составляются два выражения в форме ДНФ (суммы произведений): одно для функции возбуждения установки, а другое для функции возбуждения сброса. Каждое произведение должно содержать входные переменные (сигналы по которым совершается переход) и вторичные переменные, связанные с данным переходом, но не меняющие свои значения. В качестве вторичных переменных выступают двоичные разряды кода состояния в коде Грея. Включение вторичных переменных гарантирует выполнение переходов в правильной последовательности.
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]()
![]() .
.
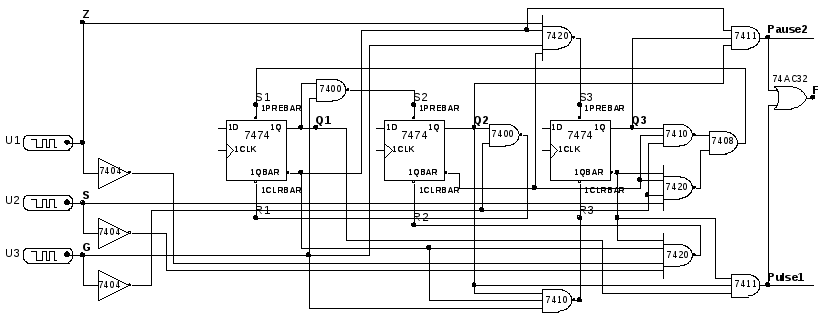
а
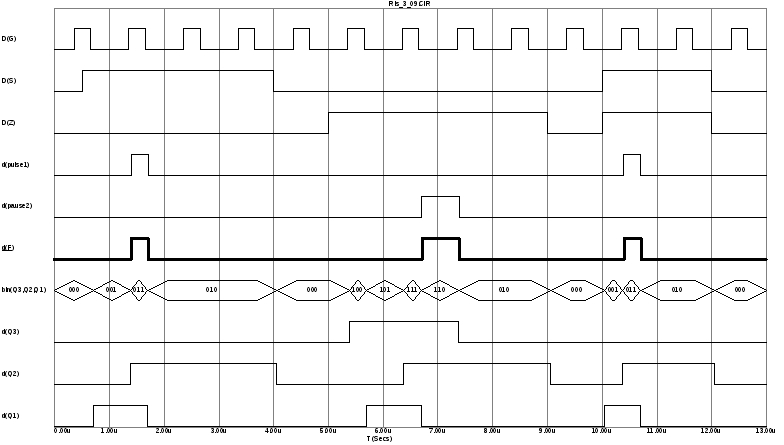
б
Рисунок 3.9 — Автомат Мура: а — схема для моделирования; б — временные диаграммы
Строится схема на основе асинхронных RS-триггеров, реализующая полученные логические выражения. Для последующего моделирования с помощью программы Micro-CAPв качестве асинхронных RS-триггеров используются JK или D-триггера с асинхронными входами установки (PREBAR) и сброса (CLRBAR). При этом входы синхронизации и информационные входы не задействуются.
Схема для моделирования с обозначениями необходимых сигналов приведена на рис. 3.9, а, а на рис. 3.9, б приведены временные диаграммы работы автомата, доказывающие его работоспособность.