

Омский государственный технический университет
Кафедра физики
Калистратова Л.Ф.
кандидат физико-математических наук, доцент
Электронные лекции по дисциплине «Общая физика»
Раздел 1. Классическая и релятивистская
механика
6 лекций (12 аудиторных часов)
Темы лекций
1.Кинематика поступательного и вращательного движений.
2.Динамика поступательного движения.
3.Динамика вращательного движения.
4.Работа, энергия.
5.Законы сохранения.
6.Специальная теория относительности (СТО).
Лекция 3. Динамика вращательного
движения
План лекции
3.1.Момент инерции.
3.2.Момент силы.
3.3.Момент импульса.
3.4.Основной закон динамики вращательного движения.

3.1. Момент инерции
Момент инерции тела:
-характеризует инертные свойства тела (или материальной точки) при вращательном движении;
-скалярная величина;
-измеряется в кгм2;
-зависит от его формы, размеров, плотности, расположения оси вращения;
-не зависит от характера движения тела.
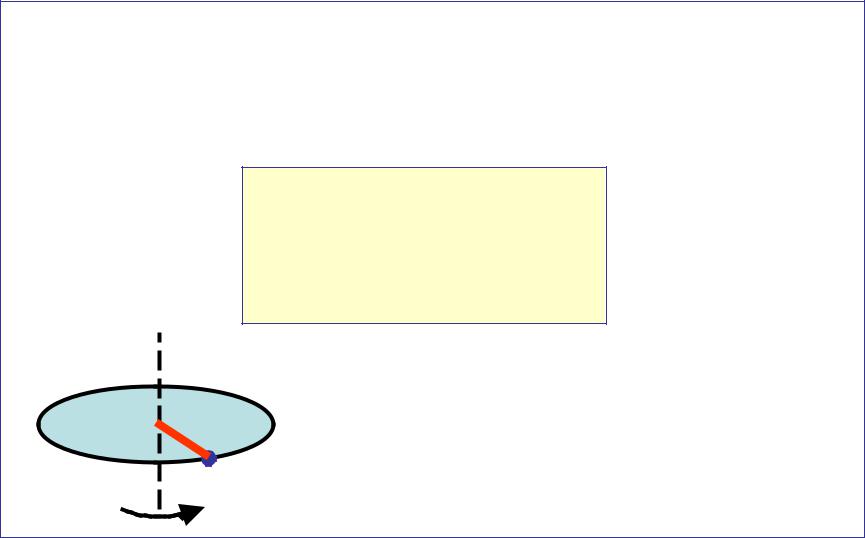
1.Момент инерции материальной точки относительно заданной оси вращения –
величина, равная произведению массы этой точки на квадрат расстояния её от оси вращения.
J m r2
r
m
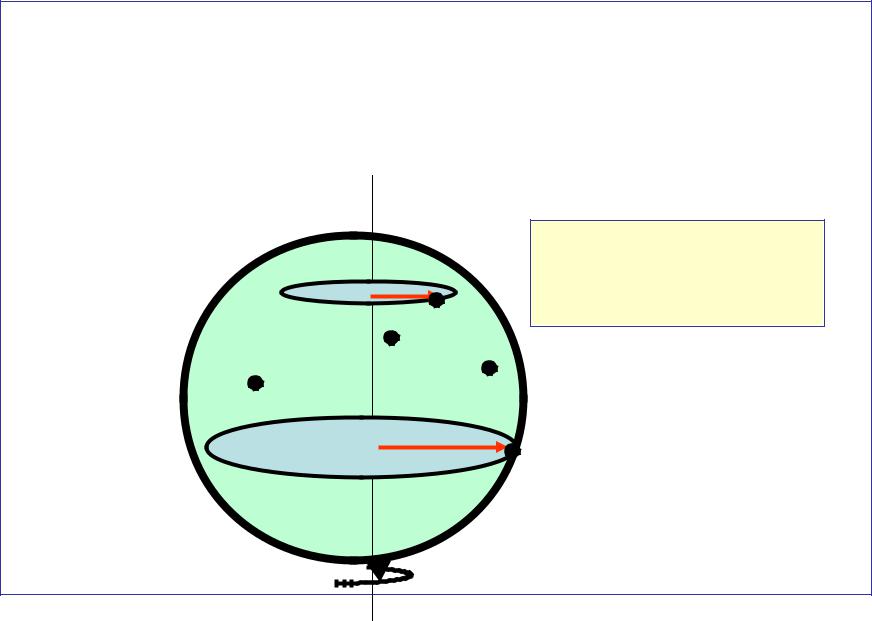
Любое твёрдое тело состоит из множества материальных точек.
При вращении материальные точки движутся по окружностям разного радиуса.
Каждая материальная точка имеет свой момент |
2 |
|||
инерции: |
|
Ji |
mi |
|
|
r2 |
ri |
||
|
|
|
|
|
|
|
m2 |
|
|
r1
m1
2. Момент инерции твёрдого тела относительно
заданной оси вращения равен скалярной сумме моментов инерций всех его материальных точек относительно этой оси:
|
|
n |
|
n |
|
||
J Ji |
|
J miri |
2 |
i 1 |
|
i 1 |
|
|
|
|
|
Для нахождения момента инерции тела неправильной геометрической формы массу тела разбивают на
элементарные массы |
. |
Δmi |
Момент инерции i-той элементарной массы
запишется как
Ji mir2
ri - расстояние от элементарной массы Δmi |
до оси |
вращения. |
|
Момент инерции твёрдого тела при этом вычисляется как сумма моментов инерции его элементарных масс.
n |
n |
|
J Ji Δmiri |
2 |
|
i 1 |
i 1 |
|
Элементарные массы можно представить как
|
ρi |
|
Δmi ρi ΔVi |
|
|
|
где |
– плотность тела в данной точке, |
ΔV |
||||
|
объём |
|||||
элементарной массы. |
|
|
i |
|||
n |
|
|||||
|
|
|
|
|
||
Следовательно, |
|
J ρiri2ΔVi |
|
|||
|
i 1 |
|
||||
Эти соотношения являются приближенными.
Значение момента инерции будут тем точнее, чем меньше
элементарные объёмы |
и соответствующие им |
элементарные массы |
Δmi |
При бесконечно малых объёмах элементарные массы будут обозначаться как dm.
Соответственно момент инерции элементарной массы
запишется как |
dJ dmr2 |
|
Тогда для твёрдых тел правильной геометрической формы вычисление момента инерции тела
сводится к вычислению интеграла:
Jr2dm ρr2dV
Вкачестве примера вычислим момент инерции однородного цилиндра относительно оси, совпадающей с осью его симметрии.