

Материал презентаций по физике / Лекции для заочников / Физика для гуманитариев_1 / Вотинов_Перминов_Физика
.pdfВращение тела вокруг неподвижной оси
Вращение вокруг неподвижной оси — частный случай вращательного движения. В этом случае траекториями всех точек являются окружности, центры которых лежат на одной прямой, которую называют осью вращения.
Положение тела в пространстве определяется углом поворота. Закон вращения:
(t), [ ] = ðàä. |
(1.20) |
Положительное направление оси свяжем с положительным направлением угловой координаты — угла поворота — правилом правого винта (рис. 1.4).
Изменение угла поворота в единицу време-
ни характеризуется вектором угловой скорости
, который направлен вдоль оси вращения (задает ее направление).
В случае неподвижной оси угловая скорость характеризуется алгебраической величиной:
z |
d |
, [ ] = ðàä/ñ. |
(1.21) |
|
||
|
Ðèñ. 1.4 |
|||||
|
dt |
|
||||
Аналогично, угловое ускорение |
|
|
||||
|
|
z |
d z |
, |
[ ] = ðàä/ñ2. |
(1.22) |
|
|
|
||||
|
|
|
dt |
|
|
|
Знак величин z è z характеризует направление соответствующего
вектора. Например, если z 0, то направление вектора совпадает
с положительным направлением оси Z, åñëè æå z 0, то направление
вектора противоположно. Аналогично и для углового ускорения. Путь, пройденный точкой по окружности, прямо пропорционален
расстоянию до оси вращения (рис. 1.5):
s = R . |
(1.23) |
Поделив данное соотношение на время поворота t, приходим (приt 0) к связи линейной и угловой скоростей:
v R. |
(1.24) |
11

Касательное (тангенциальное) ускорение
|
|
a |
dv |
|
|
d |
R R. |
(1.25) |
||||
|
|
|
|
|||||||||
|
|
|
|
|
dt |
|
dt |
|
||||
|
Нормальное (центростремительное) уско- |
|||||||||||
рение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
an |
|
v 2 |
|
2 R. |
(1.26) |
|||||
Ðèñ. 1.5 |
R |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Полное ускорение |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||
a a2 an2 R 2 |
4 . |
(1.27) |
||||||||||
Аналогия в кинематике
Аналогию в кинематике поступательного и вращательного движений можно проследить по табл. 1.1.
Ò à á ë è ö à 1 . 1
Поступательное движение |
|
Вращательное движение |
|
||||||||||||||
|
|
|
|
|
|
|
Определения |
|
|
|
|
|
|||||
Координата, м |
|
|
|
|
x |
|
Угол поворота, рад |
|
|
|
|
||||||
Скорость, м/с |
|
|
|
|
vx |
dx |
|
|
Угловая скорость, рад/с |
|
z |
d |
|
|
|||
|
dt |
dt |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Ускорение, м/с2 |
|
|
|
|
ax |
dvx |
|
Угловое ускорение, рад/с2 |
|
|
z |
d z |
|
||||
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
dt |
|
||
|
|
|
Законы равнопеременного движения |
|
|
|
|
|
|||||||||
ax const; |
|
z const; |
|
|
|
|
|
||||||||||
vx v0x axt; |
|
z 0z zt; |
|
|
|
|
|
||||||||||
x x0 |
v0x |
t |
axt2 |
|
|
0 0z t |
zt2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
||||
12
1.2. Динамика
Динамика — раздел механики, в котором изучаются причины изменения механического движения.
Динамика точки (поступательного движения)
Динамические характеристики поступательного движения
Масса m — свойство тел, определяющее их бесконтактное взаимодействие с другими телами и инертность (способность сохранять скорость).
Единица массы — килограмм: [m] = êã.
Импульс тела p (количество движения) — произведение массы тела на вектор его скорости:
|
|
[p] = êã·ì/ñ. |
(1.28) |
p mv, |
|||
Ñèëà F — векторная величина, являющаяся мерой механического взаимодействия материальной точки или тела с другими телами или полями.
Различные взаимодействия, известные в современной физике, сводятся к четырем типам, а именно:
1)гравитационное взаимодействие, возникающее между всеми телами, обладающими массой;
2)электромагнитное взаимодействие, возникающее между телами или частицами, обладающими электрическими зарядами (гл. 3);
3)сильное взаимодействие, существующее, например, между частицами, из которых состоят ядра атомов (гл. 5);
4)слабое взаимодействие, характеризующее, например, процессы превращения некоторых элементарных частиц (см. гл. 5).
Сила как количественная характеристика позволяет оценивать лишь гравитационные и электромагнитные взаимодействия. В тех чрезвычайно малых областях пространства и в тех процессах, в которых проявляются сильные и слабые взаимодействия, такие понятия, как точка приложения, линия действия, а вместе с ними и само понятие силы теряют смысл.
Единица силы — ньютон: [F] = Í.
В задачах механики учитываются гравитационные силы (силы тяготения) и две разновидности электромагнитных сил — силы упругости
èсилы реакции (нормальной реакции и трения).
13

Силы в механике
Силы тяготения — силы, возникающие между всеми телами в соответствии с законом всемирного тяготения Ньютона: между двумя материальными точками действуют силы взаимного притяжения, прямо пропорциональные массам этих точек и обратно пропорциональные квадрату расстояния между ними. Эти силы направлены вдоль прямой, соединяющей данные материальные точки.
Fòÿã G |
m1 m2 |
. |
(1.29) |
|
|||
|
r 2 |
|
|
Гравитационная постоянная G — фундаментальная константа, коэффициент пропорциональности в законе всемирного тяготения: G 6,672 10 11 Í·ì2/êã2.
Гравитационное взаимодействие между телами осуществляется посредством гравитационного поля (поля тяготения). Это поле наряду
ñдругими полями и веществом является одной из форм материи.
Ñкаждым телом неразрывно связано гравитационное поле, проявляющееся в том, что на помещенную в поле материальную точку действует гравитационная сила, пропорциональная массе этой точки.
Тело, гравитационное поле которого исследуется, называется источ- ником этого поля.
Силовой характеристикой гравитационного поля является ускорение
свободного падения (напряженность гравитационного поля)
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Fòÿã |
(1.30) |
|||
|
|
|
|
|
|
g |
|
|
|
|
|
||
|
m |
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||
в данной точке пространства. |
|
|
|
|
|
|
|
||||||
Закон всемирного тяготения справедлив также для однородных тел ша- |
|||||||||||||
|
|
|
|
|
|
|
|
рообразной формы при расстоянии r |
|||||
|
|
|
|
|
|
|
|
между их центрами, превышающем |
|||||
|
|
|
|
|
|
|
|
сумму их радиусов (рис. 1.6). |
|
||||
|
|
|
|
|
|
|
|
Примеры: |
|
|
|||
|
|
|
|
|
|
|
|
1. Ускорение свободного паде- |
|||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
ния вблизи поверхности планеты |
|||||
|
|
|
|
|
|
|
|
Земля |
|
||||
|
|
|
|
|
|
|
|
|
|
g0 G |
mЗемли |
9,8 ì/ñ2. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
Ðèñ. 1.6 |
|
|
|
|
|
|
|
RЗемли2 |
|
||||
14
2. Ускорение свободного падения на высоте h над поверхностью планеты
|
|
|
R |
2 |
g g |
0 |
|
|
. |
|
||||
|
|
|
||
|
|
R h |
||
Сила, действующая на тело массой m со стороны гравитационного поля в точке с напряженностью g, называется силой тяжести:
|
|
(1.31) |
Fòÿæ mg. |
||
Силы упругости — силы, возникающие при упругой деформации тел. Деформация называется упругой, если после прекращения действия
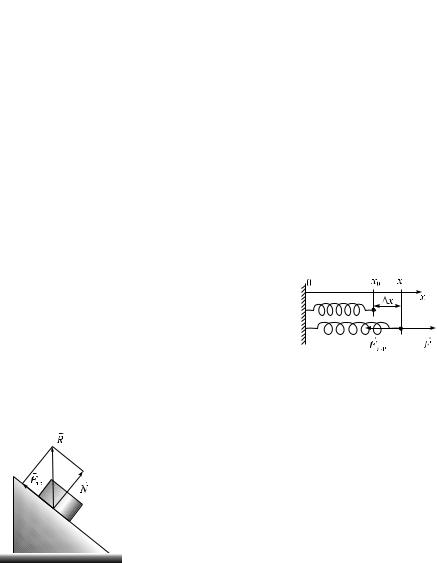
внешних сил восстанавливаются прежние размеры и форма тела. Установленный экспериментально закон Гука утверждает, что при
упругой деформации удлинение образца пропорционально внешней силе:
Fóïðx k x, |
(1.32) |
ãäå k — жесткость (коэффициент упругости) образца или пружины, [k] = Í/ì; x — абсолютное удлинение образца (абсолютная деформация) x = x – x0, x0 — длина нерастянутого образца (рис. 1.7).
Сила реакции опоры R (натяжения ни- |
|
|
òèT ) — сила, действующая на тело со стороны |
|
|
опоры (подвеса). При этом силу, с которой те- |
|
|
ло действует на опору или подвес, называют |
|
|
|
|
|
весом P òåëà. |
|
|
|
|
|
Силу реакции опоры R чаще рассматрива- |
Ðèñ. 1.7 |
|
ют как сумму двух сил: силы нормальной реак- |
|
|
|||
|
|
|
|
|
|
ции опоры N , направленной перпендикулярно этой поверхности, и ñèëû |
|||||
|
|
|
|
|
|
|
трения Fòð , направленной вдоль этой |
||||
|
поверхности (рис. 1.8): |
|
|
||
|
|
|
|
|
|
|
|
R |
N |
Fòð . |
(1.33) |
|
|
При контакте гладких поверхностей Fòð 0 |
|||
|
|
|
|
|
|
|
è R |
N . Для шероховатых поверхностей в про- |
|||
|
стейшем случае формулируется закон сухого тре- |
||||
|
íèÿ: при скольжении модуль силы трения прямо |
||||
|
пропорционален модулю силы нормальной реак- |
||||
|
|||||
Ðèñ. 1.8 |
ции опоры: |
|
|
|
|
15
Fòð N , |
(1.34) |
где — безразмерный коэффициент трения, зависящий от типов соприкасающихся поверхностей.
Если тело находится в состоянии покоя, то модуль и направление силы трения неизвестны, поэтому их находят из условий равновесия.
Первый закон Ньютона (закон инерции)
Для описания движения вводится понятие системы отсчета. Систем отсчета бесчисленное множество. Законы механики в разных системах отсчета имеют различный вид, и может оказаться, что в произвольной системе отсчета законы даже совсем простых явлений будут весьма сложными. Естественно, возникает задача отыскания такой системы от- счета, в которой законы механики были бы возможно более простыми. Такая система отсчета наиболее удобна для описания механических явлений.
Рассмотрим возможные причины ускорения материальной точки относительно некоторой произвольной системы отсчета. Опыт показывает, что этой причиной могут быть как действие на данную точку каких-то определенных тел, так и свойства самой системы отсчета (относительно разных систем отсчета ускорение будет различным).
Можно предположить, что существует такая система отсчета, в которой ускорение материальной точки целиком обусловлено только взаимодействием ее с другими телами. Такие системы отсчета называются инерциальными. Тогда свободная материальная точка (не подверженная действию никаких других тел) будет двигаться относительно инерциальной системы отсчета прямолинейно и равномерно (или, как говорят, по инерции).
Утверждение, что инерциальные системы отсчета существуют, составляет содержание первого закона классической механики — закона инерции Ньютона, впервые установленного Галилео Галилеем.
Существование инерциальных систем отсчета подтверждается опытом, т. е. всегда можно найти такую систему отсчета, которую с наперед заданной точностью можно считать инерциальной.
Любая другая система отсчета, движущаяся равномерно и прямолинейно относительно инерциальной системы отсчета, является также инерциальной. Таким образом, существует не одна, а бесчисленное множество инерциальных систем отсчета, движущихся относительно друг друга пря-
16
молинейно и равномерно. Системы отсчета, движущиеся с ускорением относительно инерциальных систем, называются неинерциальными.
Важной особенностью инерциальных систем отсчета является то, что по отношению к ним время и пространство обладают определенными свойствами симметрии, а именно: опыт убеждает, что в этих системах отсчета время однородно, à пространство однородно è изотропно.
Однородность времени заключается в том, что протекание физиче- ских явлений (в одних и тех же условиях) в разное время их наблюдения одинаково. Иначе говоря, различные моменты времени эквивалентны друг другу по своим физическим свойствам.
Однородность пространства заключается в том, что свойства пространства в различных точках одинаковы.
Изотропность пространства заключается в том, что свойства пространства в каждой точке одинаковы во всех направлениях.
Принцип относительности Галилея
Все инерциальные системы по своим механическим свойствам эквивалентны друг другу. Это означает, что никакими механическими опытами, проводимыми в данной инерциальной системе, нельзя установить, покоится эта система отсчета или движется.
Во всех инерциальных системах отсчета свойства пространства и времени одинаковы, одинаковы также и все законы механики.
Этот принцип является обобщением опытных данных.
Преобразования Галилея
Преобразованиями Галилея называют формулы перехода от одной
инерциальной системы отсчета к другой. |
|
|
|
Пусть инерциальная система K движется со скоростью u относи- |
|
тельно другой инерциальной системы K. Выберем оси координат |
|
X ,Y , X K -системы параллельно соответствующим осям X ,Y , Z K-ñèñ- |
|
темы, причем так, чтобы оси X è X совпадали между собой и были направлены вдоль вектора u (рис. 1.9). Взяв за начало отсчета момент времени, когда начала координат O è O совпадали, запишем соотношение между радиусами-векторами r è r одной и той же точки A â K - è K-ñèñ-
темах: |
|
|
|
|
|
|
(1.35) |
r |
r |
ut, |
ïðè ýòîì
17

Ðèñ. 1.9
ной системы отсчета к другой:
t t. |
(1.36) |
Соотношения (1.35) и (1.36) представляют собой преобразования Галилея. В координатах эти преобразования имеют вид:
x x ut, y y, z z, t t.(1.37)
Продифференцировав (1.35) по времени, найдем классический закон преобразования скорости точки при переходе от одной инерциаль-
|
|
(1.38) |
v v |
u, |
ãäå v, v — скорости относительно систем отсчета K è K соответственно.Дифференцируя это выражение по времени с учетом того, что u = const, получаем a a, т. е. ускорение точки одинаково во всех инерциальных системах отсчета.
Второй закон Ньютона (основное уравнение механики)
Понятия силы и массы вводятся безотносительно к движению, но опыт показывает, что всякое тело «оказывает сопротивление» (инертно) при любых попытках изменить его скорость — как по модулю, так и по направлению.
Многочисленные эксперименты говорят о том, что произведение
массы точки на вектор ее ускорения равно силе, действующей на точку:
|
|
|
(1.39) |
|
ma |
F. |
|||
С учетом (1.28) это же соотношение можно записать через импульс: |
||||
|
|
|
|
|
|
dp |
|
|
|
|
F, |
(1.40) |
||
|
dt |
|||
|
|
|
||
èëè |
|
|
|
|
|
(1.41) |
|||
dp Fdt, |
||||
ãäå Fdt называется импульсом силы.
Производная по времени импульса точки равна силе, действующей на материальную точку, èëè изменение импульса точки равно импульсу
18

ñèëû. Последнее утверждение в точной формулировке изложено И. Ньютоном в 1687 году.
Соотношения (1.39)–(1.41) представляют собой различную математическую запись второго закона Ньютона.
Для решения задач полезно записать соотношение (1.39) в проекциях на координатные оси:
1) декартова ортогональная система координат (см. рис. 1.2):
max Fx ; |
|
||||
|
|
|
|
|
(1.42) |
ma y Fy ; |
|||||
|
|
|
|
|
|
maz Fz ; |
|
||||
|
|
|
|
|
|
2) естественные оси (см. рис. 1.3): |
|
|
|
|
|
|
m |
dv |
|
F ; |
|
ma F ; |
|
|
|||
|
dt |
(1.43) |
|||
|
|
|
|
|
|
|
|
v 2 |
|
||
man Fn ; |
|
|
Fn . |
|
|
|
m |
|
|
|
|
|
|
|
|
||
|
|
R |
|
||
Третий закон Ньютона
Два тела действуют друг на друга с силами, равными по величине
и противоположными по направлению: |
|
|
|
|
|
|
|
F12 |
F21 , F12 |
F21 . |
(1.44) |
Действию всегда соответствует равное и противоположное противодействие; другими словами: действия двух тел друг на друга всегда рав-
ны и направлены в противоположные стороны. |
|
|
||
|
|
|
||
Пример. Âåñ òåëà P |
и сила реакции опоры R |
связаны: P |
R, P R. |
|
Механическая система
Механическая система — совокупность материальных точек или тел, движение которых связано между собой некоторым образом.
Масса механической системы — сумма масс материальных точек, из которых она состоит:
N
m m1 m2 mN mi .
i 1
19

Центр масс механической системы rC — точка, однозначно связанная с системой, положение которой определяется следующим образом:
|
|
|
|
N |
|
|
|
|
|
||
|
|
|
rC |
mi ri |
|
|
|
|
|
||
|
|
|
i 1 |
. |
|
|
|
(1.45) |
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
m |
|
|
|
|
|
|
Координаты центра масс: |
|
|
|
|
|
|
|
|
|||
|
N |
|
|
|
N |
|
|
N |
|
|
|
|
mi xi |
|
|
|
mi yi |
|
|
mi zi |
|||
xC |
i 1 |
; |
yC |
i 1 |
; |
zC |
i 1 |
|
. |
||
m |
m |
|
|
||||||||
|
|
|
|
|
|
|
m |
||||
Импульс системы — сумма импульсов материальных точек, из которых она состоит:
|
N |
|
p pi . |
(1.46) |
|
i 1
Импульс системы можно выразить через скорость центра масс:
|
|
(1.47) |
p mvC . |
||
Внешние силы F e — силы, которые действуют на данную механиче-
скую систему со стороны других систем.
Внутренние силы F внутр — силы, которые действуют между материальными точками данной механической системы.
Свойство внутренних сил (следует из третьего закона Ньютона):
N
Fjвнутр 0. j 1
Поэтому сумма всех сил, действующих на тела данной механиче- ской системы, равна сумме только внешних сил:
|
|
|
F |
F e F |
внутр F e . |
Законы изменения и сохранения импульса системы
Производная по времени от импульса системы равна сумме всех
внешних сил: |
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
e |
|
|
|
|
dp |
N |
|
|
N |
|
|
||
|
|
Fj |
èëè |
dp Fj |
dt. |
(1.48) |
|||
|
dt |
||||||||
|
j 1 |
|
|
|
j 1 |
|
|
|
|
20