

Задания для самостоятельного решения
Дано:
1. Объект управления, описывающийся дифференциальным уравнением
![]() ,
,
где у – выходной параметр; U – функция управления.
2. Критерий оптимальности – максимальное быстродействие, т.е.
![]() ,
,
где [0; T] – временной интервал управления.
3.
Ограничение на управление:
![]() .
.
4.
Координаты начальной точки, в которой
находится объект управления
![]() ,
где
,
где
![]() .
.
5. Конечная точка – начало координат фазовой плоскости.
Требуется:
найти такую функцию управления
![]() ,
при которой объект из начальной точки
в конечную (начало координат фазовой
плоскости) переходит за минимальное
время.
,
при которой объект из начальной точки
в конечную (начало координат фазовой
плоскости) переходит за минимальное
время.
Задачу целесообразно решать в следующей последовательности:
1. Уравнение объекта представить в виде системы дифференциальных уравнений в фазовых координатах:
![]()
2. К полученной системе дифференциальных уравнений добавить уравнение
![]()
3. К найденной системе применить принцип максимума Понтрягина.
4.
Найти функции
![]()
5.
На фазовой плоскости
![]() отметить начальную точку.
отметить начальную точку.
6. Определить начальную траекторию движения, а затем момент времени переключения.
7. Найти конечную траекторию движения.
|
№ варианта |
Координаты начальной точки |
|
1 |
(0,5; 0,5) |
|
2 |
(1; 0,2) |
|
3 |
(–0,5; 0,7) |
|
4 |
(–1,2; 1,5) |
|
5 |
(–1,5; 0,5) |
|
6 |
(–1,7; 1,9) |
|
7 |
(–2; 1,5) |
|
8 |
(–2,1; 1,1) |
|
9 |
(–1,5; –0,5) |
|
10 |
(–1,7; –1,2) |
|
11 |
(–1,4; –1,4) |
|
12 |
(–2,0; –1,2) |
|
13 |
(1,2; –1,2) |
|
14 |
(1,5; –1,5) |
|
15 |
(–2; –1,4) |
|
16 |
(–2,3;2) |
|
17 |
(2,8;–1) |
|
18 |
(0,5;2,5) |
|
19 |
(–1,3;–1) |
|
20 |
(0,5;–1,4) |
Пример.
Дан объект второго порядка, имеющий два нулевых корня. Найти оптимальное по быстродействию управление, при котором объект из любой точки фазовой плоскости переходил бы в начало координат за минимальное время.
![]()
![]()
![]()
![]()
![]()
![]()
Решение.
Первоначальное управление u = –1, после переключения u = 1.
1. Находится начальная и конечная траектория движения.
Для рассматриваемого случая:
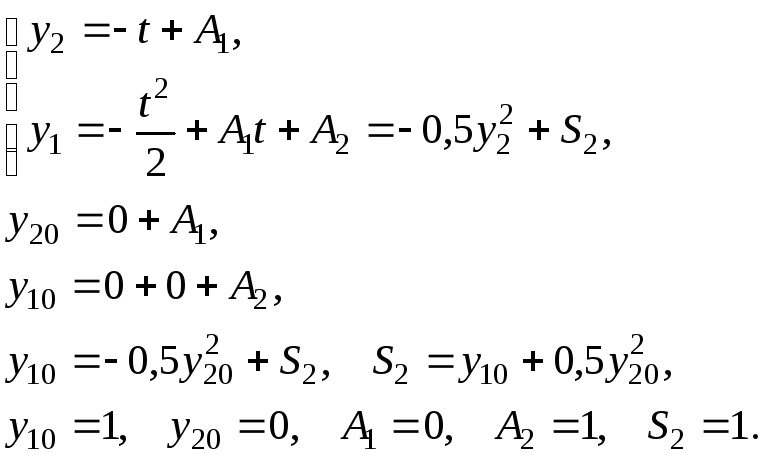
начальная траектория y1 = – 0,5 y22 + S2,
конечная траектория y1 = 0,5 y22.
2. Подставляются координаты начальной точки y1(0) = y10, y2(0)= y20, в уравнения для фазовых координат при управлении и = –1 , находим постоянные A1, A2, S2:
3. Нахождение времени переключения. Для этого используется равенство
y1 = 0,5 y22 (уравнение линии переключения):
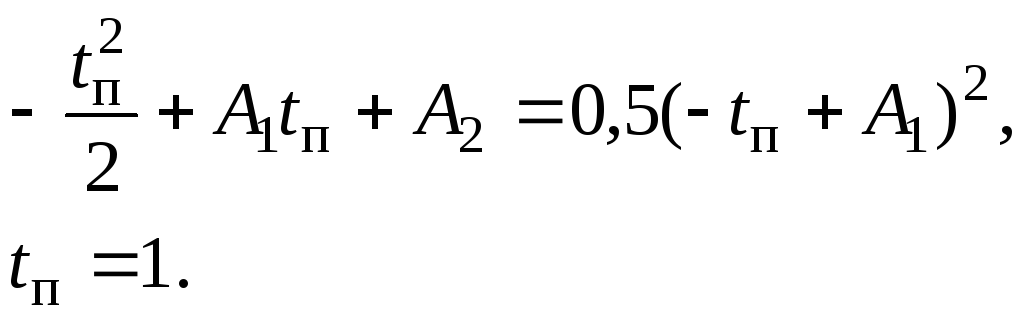
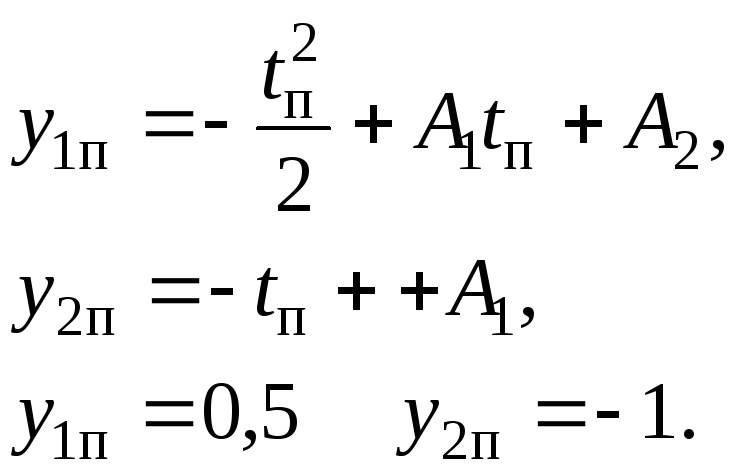
4. Находится координаты точки переключения:
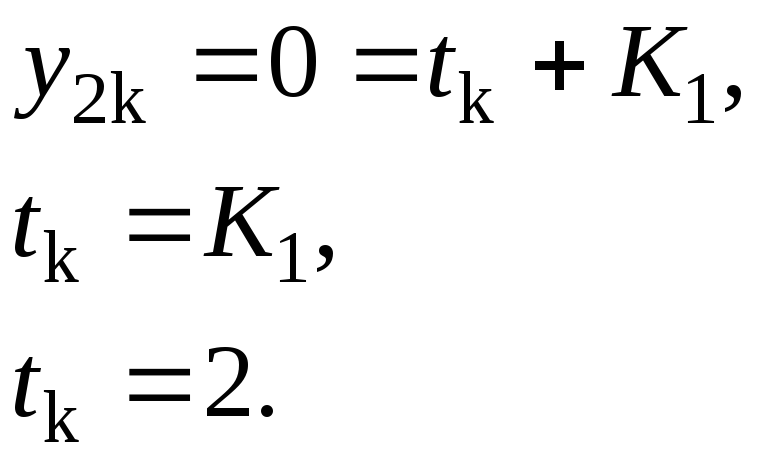
5. Находится коэффициенты K1 и K2 , решив систему уравнений:

6. Находится время прихода в конечную точку из уравнения:
Оптимальная траектория движения изображена на рис. 5.5.

Рис. 5.5. Оптимальная траектория движения
Список литературы
Панов В.А. Математические основы теории систем. Методы оптимизации / В.А. Панов. – Пермь: Изд-во Перм. гос. техн. ун-та , 1999. – 76 с.
Таха, Хемди А. Введение в исследование операций, 7-е издание.: Пер. с англ. — М.: Издательский дом "Вильяме", 2005. — 912 с.
Лесин В.В. Основы методов оптимизации / В.В. Лесин, Ю.П. Лисовец. – М., 1995. – 344 с.
Бронштейн И.Н. Справочник по математике / И.Н. Бронштейн, К.А. Семендяев. – М., Наука, 1980. – 976 с.
Ногин В.Д. Основы теории оптимизации / В.Д. Ногин и др. – М., ВШ, 1986. – 384 с.
Кротов В.Ф. Основы теории оптимального управления / Под ред. В. Ф. Кротова. – М., ВШ, 1990. – 430 с.
Учебное издание

