

2.8.6. Алгоритм решения транспортной задачи
Методом «северо-западного» угла (или каким-либо другим) находится допустимый начальный план перевозок. Заполняются транспортная таблица и таблица издержек.
Полученный план проверяется на оптимальность.
В таблицу задачи переносятся соответствующие значения из транспортной таблицы.
Находится ui и vj из равенства ui + vj = pij. Полученные значения заносятся в соответствующую строку и столбец.
Заполняются пустые клетки таблицы задачи. В них заносятся значения qij:
qij = pij – ui – vj.
Анализ полученной таблицы задачи. Если все коэффициенты таблицы неотрицательны, то план перевозок, зафиксированный в транспортной таблице, оптимален. В противном случае переход к следующему пункту.
3. Улучшение полученного плана.
В таблице задачи находится клетка с наибольшим по модулю отрицательным коэффициентом. В соответствующей клетке транспортной таблицы ставится знак «+».
В заполненных клетках транспортной таблицы ставятся знаки «+» и «–» таким образом, что во всех строках и столбцах количество плюсов равно количеству минусов.
Анализируется содержимое клеток, помеченных знаком «–». Из анализируемых значений выбирается минимальное. Пусть минимальное значение F.
Содержимое помеченных клеток изменяется на величину F. Причем содержимое клеток с «–» уменьшается на F, а с «+» – увеличивается на F.
Переход к п. 2.
Пример 1.
Дано: транспортная задача задана транспортной таблицей с начальным планом и таблицей издержек:
Транспортная таблица:
|
|
10 |
20 |
30 |
45 | |
|
25 |
10 |
15 |
|
| |
|
45 |
|
5 |
30 |
10 | |
|
35 |
|
|
|
35 | |
Таблица издержек:
|
|
1 |
2 |
3 |
4 | |
|
1 |
2 |
3 |
4 |
3 | |
|
2 |
1 |
2 |
4 |
1 | |
|
3 |
3 |
2 |
2 |
5 | |
Решение.
1. Составляется таблица задачи. Для этого берется таблица такой же размерности, что и транспортная таблица. В этой таблице отмечаются занятые клетки транспортной таблицы. Затем в отмеченные клетки переносится содержимое соответствующих клеток таблицы издержек:
|
|
|
u1 |
u2 |
u3 |
u4 | |
|
|
|
1 |
2 |
3 |
4 | |
|
v1 |
1 |
2 |
3 |
|
| |
|
v2 |
2 |
|
2 |
4 |
1 | |
|
v3 |
3 |
|
|
|
5 | |
2. Находятся значения vi, ui из уравнений
u1 + v1 = 2, u3 + v2 = 4,
u2 + v1 = 3, u4 + v2 = 1,
u2 + v2 = 2, u4 + v3 = 5.
Здесь 7 неизвестных и 6 равенств. Следовательно, система имеет множество решений. Одно из этих решений находится следующим образом. В нижнюю правую клетку заносится ноль. Остальные неизвестные находятся из соответствующих уравнений. В итоге таблица задачи примет вид:
|
|
1 |
2 |
3 |
4 |
vj | |
|
|
|
|
|
|
| |
|
1 |
2 |
3 |
|
|
2 | |
|
2 |
|
2 |
4 |
1 |
1 | |
|
3 |
|
|
|
5 |
5 | |
|
ui |
0 |
1 |
3 |
0 |
| |
3. Пустые клетки таблицы заполняются по приведенной выше формуле. Например, содержимое клетки Q13 находится как разность содержимого соответствующей клетки таблицы издержек 4 и u3, v1:
Q13 = p13 – u3 – v1 = 4 –3 –2 = –1.
В итоге таблица задачи принимает вид:
|
|
1 |
2 |
3 |
4 |
vj | |
|
1 |
2 |
3 |
–1 |
1 |
2 | |
|
2 |
0 |
2 |
4 |
1 |
1 | |
|
3 |
–2 |
–4 |
–6 |
5 |
5 | |
|
ui |
0 |
1 |
3 |
0 |
| |
4. Анализ полученной таблицы задачи. В таблице имеется отрицательный коэффициент, следовательно, план перевозок, представленный транспортной таблицей, не является оптимальным.
5. Улучшение полученного плана.
5.1. В таблице задачи находится клетка с максимальным по модулю отрицательным коэффициентом. Это Q33 = –6. В соответствующей клетке (с индексом «33») транспортной таблицы ставится знак «+».
5.2. В соответствии с п. 3.2 алгоритма проставляются знаки «+» и «–» в заполненных клетках транспортной таблицы
|
|
10 |
20 |
30 |
45 |
|
25 |
10 |
15 |
|
|
|
45 |
|
5 |
30 – |
10+ |
|
35 |
|
|
+ |
35 – |
5.3. Сравнивается содержимое клеток, помеченных знаком «–». Выбирается минимальное F = 30.
5.4. Содержимое помеченных клеток транспортной таблицы изменяется на величину F = 30.
|
|
10 |
20 |
30 |
45 | |
|
25 |
10 |
15 |
|
| |
|
45 |
|
5 |
|
40 | |
|
35 |
|
|
30 |
5 | |
Целевая функция для данного плана Q = 200.
Повторение предыдущих пунктов алгоритма.
6.1.
-
1
2
3
4
vj
1
2
3
5
1
2
2
0
2
6
1
1
3
–2
–4
2
5
5
ui
0
1
–3
0
6.2.
|
|
10 |
20 |
30 |
45 |
|
25 |
10 |
15 |
|
|
|
45 |
|
5 – |
|
40 + |
|
35 |
|
+ |
30 |
5 – |
6.3.
-
10
20
30
45
25
10
15
45
0
45
35
5
30
180
6.4.
-
1
2
3
4
vj
1
2
3
1
1
2
2
0
2
2
1
1
3
2
2
2
4
1
ui
0
1
1
0
В таблице задачи отсутствуют отрицательные коэффициенты. Следовательно, план, представленный в последней транспортной таблице, является оптимальным.
Ответ:
Х11 = 10
Х12 =15
Х24 = 45
Х32 = 5
Х33 = 30
Х13 = Х14 = Х21 = Х22= Х23 = Х31 = Х34 = 0.
Целевая функция Q = 180.
Пример 2.
Имеется печатная плата с тремя разъемами: 48, 40, 56 выводов соответственно; 1, 2, 3, 4 – микросхемы, имеющие 18,13,14,17 выводов соответственно.
Определить оптимальное число связей каждой микросхемы с каждым разъемом. Критерий оптимизации – минимальная суммарная длина связей. Для получения сбалансированной задачи вводится 5-ая микросхема с 14 выводами и pij=0.
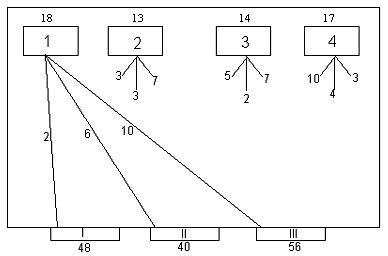
Рис. 2.5. Печатная плата
Решение
1. Составляем таблицу издержек:
-
1
2
3
4
5
1
2
3
5
10
0
2
6
3
2
4
0
3
10
7
7
3
0
где Pij – число связей i-ого разъема с j-ой микросхемой
2. Методом «северо-западного» угла находим допустимый план:
-
0
0
18
26
0
0
24
42
48
16
14
0
24
48
24
24
0
22
40
18
22
0
14
30
56
26
16
14
3. Составляется таблица задачи. Для этого берется таблица такой же размерности, что и транспортная таблица. В этой таблице отмечаются занятые клетки транспортной таблицы. Затем в отмеченные клетки переносится содержимое соответствующих клеток таблицы издержек:
Пустые клетки таблицы заполняются по формуле qij = pi – ui – vj
|
|
1 |
2 |
3 |
4 |
5 |
vi | |
|
1 |
2 |
3 |
3 |
12 |
5 |
–5 | |
|
2 |
4 |
3 |
2 |
6 |
5 |
–5 | |
|
3 |
3 |
–1 |
7 |
3 |
0 |
0 | |
|
ui |
7 |
8 |
7 |
3 |
0 |
| |
4. Анализ полученной таблицы задачи. В таблице имеется отрицательный коэффициент, следовательно, решение не является оптимальным
5. Улучшение полученного плана.
5.1. В таблице задачи находится клетка с максимальным по модулю отрицательным коэффициентом. Это Q32 = –1. В соответствующей клетке (с индексом «32») транспортной таблицы ставится знак «+».
5.2. В соответствии с п.3.2. алгоритма проставляются знаки «+» и «–» в заполненных клетках транспортной таблицы
5.3. Сравнивается содержимое клеток, транспортной таблицы помеченных знаком «–». Выбирается минимальное F = 18.
5.4. Содержимое помеченных клеток транспортной таблицы изменяется на величину F = 18.
6. Составляем таблицу задач.
|
|
1 |
2 |
3 |
4 |
5 |
uj | ||
|
1 |
2 |
3 |
3 |
6 |
0 |
0 | ||
|
2 |
4 |
0 |
2 |
0 |
0 |
0 | ||
|
3 |
8 |
3 |
2 |
4 |
0 |
0 | ||
|
vi |
2 |
3 |
2 |
4 |
0 |
446 | ||
Так как в таблице нет отрицательных коэффициентов, то полученный план – оптимальный.
Ответ:
x11 = 24;
x13 = x14 = 0;
x21 = x22 = 0;
x23 = 40;
x24 = 0;
x31 = 0;
x32 = 18;
x33 = 8;
x34 = 16.