

2.2.1. Цифровой вольтметр с глин
В основе работы времяимпульсного вольтметра лежит преобразование измеряемого напряжения в пропорциональном интервале времени, длительность которого измеряется путем заполнения этого интервала импульсами со стабильной частотой следования (счетными импульсами).
Упрощенная структурная схема времяимпульсного цифрового вольтметра постоянного тока приведена на рис. 2.19. Наряду с блоками СУ, ГЛИН в схему входят блок управления (БУ), блок формирования БФ, временной селектор ВС и генератор счетных импульсов (ГСИ).
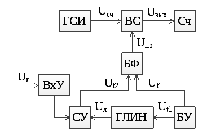
Рис. 2.19. Структурная схема времяимпульсного цифрового вольтметра
На БФ с БУ поступает импульс Ut1, который открывает временной селектор. Временной селектор пропускает на выход счетные импульсы, следующие с частотойf0. Одновременно запускается ГЛИН. Линейно-изменяющееся напряжениеUЛподается на устройство сравнения, которое в момент, когдаUXстановится равнымUЛ, вырабатывает импульсUt2. ИмпульсUt2закрывает временной селектор, что прекращает прохождение счетных импульсов.
Временные диаграммы приведены на рис. 2.20.
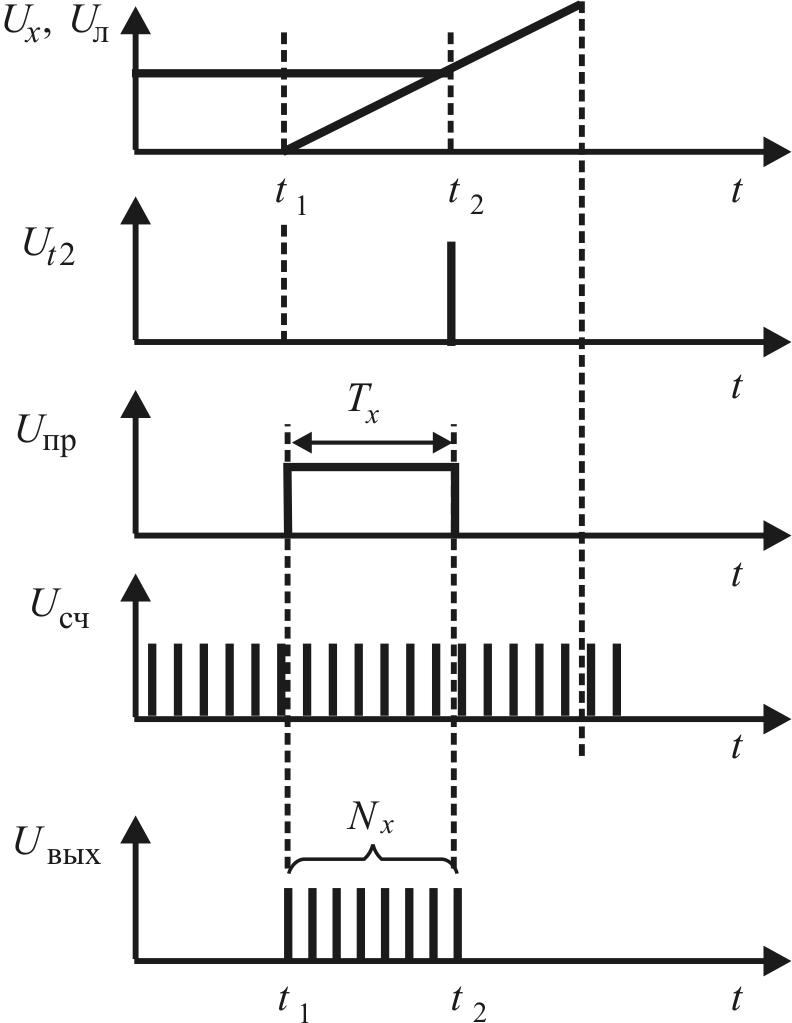
Рис. 2.20. Временные диаграммы времяимпульсного вольтметра
Число импульсов Nx, заполняющих временной интервалТxс точностью до одного импульса, описывается формулой
 ,
,
где Тx=Ux/K,K– известный коэффициент, зависящий от скорости нарастания линейно-изменяющегося напряжения. Таким образом,
 ,
,
откуда
 .
.
В вольтметре отношение К/f0выбирается равным 10-m, гдеm= 1, 2, 3, …, поэтому прибор непосредственно показывает значение измеряемого напряжения (числоmопределяет положение запятой в цифровом отсчете). Указанный цикл работы вольтметра периодически повторяется. Возврат генератора линейно изменяющегося напряжения в исходное состояние и подготовка схемы к очередному измерению осуществляется импульсами от БУ после истечения времениt2.
Основным недостатком метода времяимпульсного преобразования является его невысокая помехоустойчивость. Шумовая помеха, наложенная на измеряемое напряжение Ux, изменяет его и, следовательно, изменяет момент появления импульсаUt2, определяющего длительность времени счета. Тем не менее времяимпульсное преобразование постоянных напряжений с генератором линейно-изменяющегося напряжения позволяет создавать сравнительно простые и достаточно точные вольтметры.
Погрешности метода определяются нелинейностью и нестабильностью линейно-изменяющегося напряжения и погрешностью, обусловленной нестабильностью порога срабатывания сравнивающего устройства. Основной недостаток метода – невозможность подавления напряжения помех. Для устранения этого недостатка на входе прибора включают фильтр, что приводит к существенному увеличению времени измерения. Цифровые вольтметры с ГЛИН имеют погрешность, не превышающую 0,1…0,05 %.
2.2.2. Цифровой вольтметр двойного интегрирования
В цифровых вольтметрах двойного интегрирования преобразование Uxв пропорциональный ему временной интервалТхосуществляется путем интегрирования сначала измеряемогоUx, а затем опорногоUопнапряжений. В первом такте в течение времениTипроизводится интегрирование входного напряженияUx, в результате чего напряжение на выходе интегратора
 ,
,
где RC– постоянная времени интегратора;t– независимая переменная величина (время).
В конце интервала интегрирования напряжение на выходе интегратора
 .
.
В течение второго такта интегрируется опорное напряжение Uоп, имеющее противоположную по отношению кUxполярность. Интегрирование опорного напряжения продолжается до тех пор, пока выходное напряжение интегратора снова не станет равным нулю. Поэтому в течение времени второго такта напряжение на выходе интегратора
 ,
,
в конце этого периода
 ,
,
откуда
 . (2.9)
. (2.9)
Преобразование временного интервала Txв эквивалентное число импульсовNxосуществляется так же, как и в описанном выше методе, – путем заполненияTxимпульсами генератора опорной частоты и подсчетаUxчисла счетчиком,
 ,
,
где fоп– частота генератора опорной частоты.
Интервал интегрирования Tиформируется обычно путем заполнения счетчика импульсами от генератора опорной частоты и определяется в этом случае формулой
 ,
,
где N– емкость счетчика, тогда
 .
.
Из уравнения (2.9) видно, что временной интервал Tx, пропорциональныйUx, не зависит от постоянной времени интегратораRC, а зависит от значенийUопиTи, которые могут поддерживаться постоянными с высокой точностью. В этом основное преимущество метода двойного интегрирования перед методом с генератором линейно изменяющегося напряжения, описанным выше. Достоинством метода является также то, что значениеNxне зависит от начального напряжения интегратора и долговременной нестабильностиTииfоп.
Структурная схема вольтметра, основанного на методе двойного интегрирования, приведена на рис. 2.21, а временные диаграммы, поясняющие его работу, – на рис. 2.22.
После запуска устройства управления (момент t1) на счетчик и запоминающее устройство подается сигнал, устанавливающийUxв исходное (нулевое) состояние. В моментt2с устройства управления подается сигнал, который ключ Кл2 размыкает, а ключ Кл1 устанавливает в положение1, когда на вход интегратора подаетсяUx, например +u1. Ключ Кл1 находится в положении1в течение времениTи, при этом напряжение на выходе интегратораuинтвозрастает до значения +u’1(первый такт работы прибора). Интервал интегрированияTиформируется следующим образом. В момент t2 на один
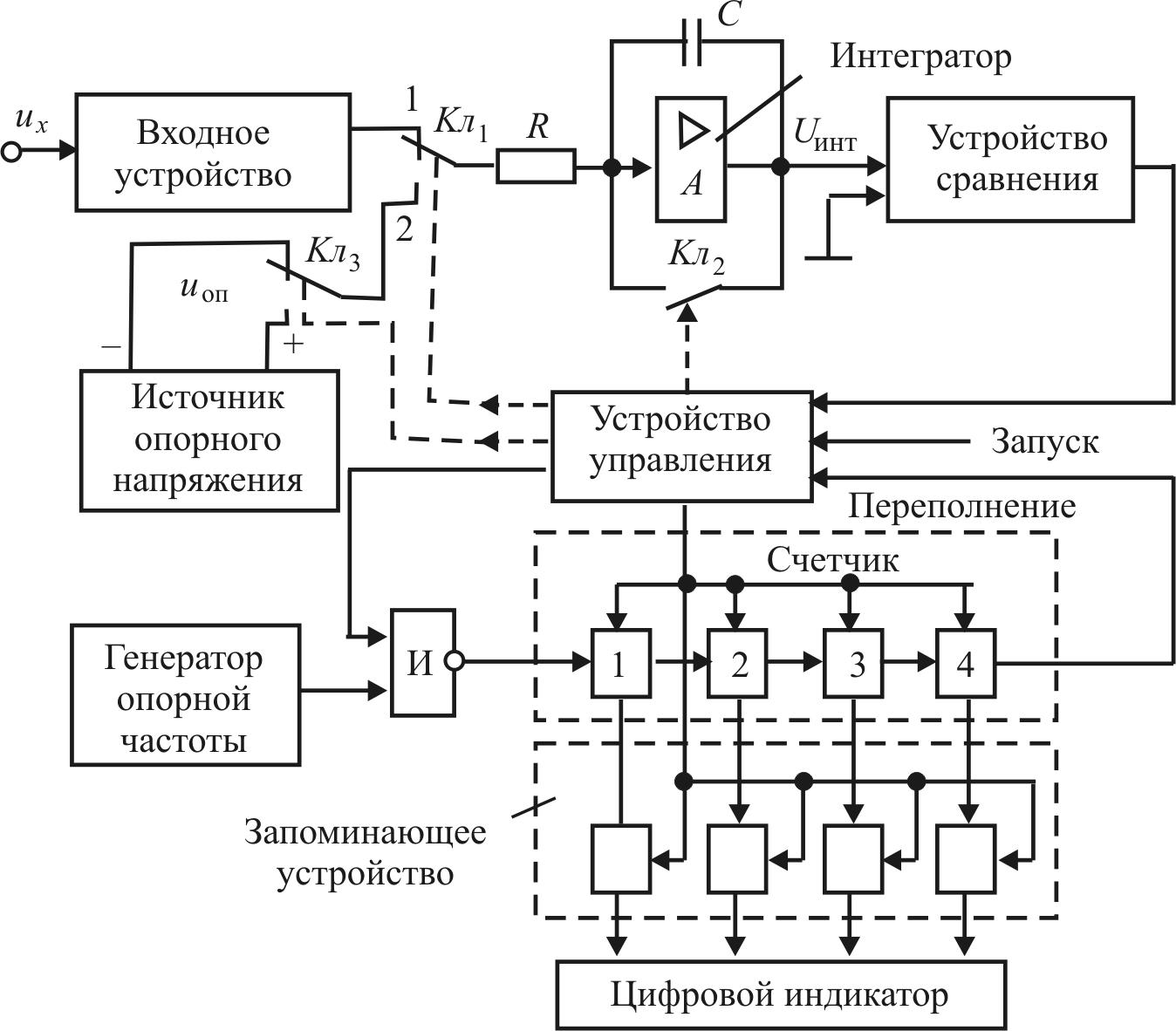
Рис. 2.21. Структурная схема цифрового вольтметра с двойным интегрированием
из входов схемы «И» с устройства управления подается сигнал, по которому с выхода схемы «И» на вход счетчика подаются импульсы с генератора опорной частоты, подаваемые на второй вход схемы «И». Счет этих импульсов идет до полного заполнения счетчика. На рис. 2.21 счетчик имеет четыре декады, следовательно, счет идет до 104импульсов. После того как в счетчике зафиксируется 9999 импульсов, следующий десятитысячный импульс возвращает его в исходное состояние и с последней декады на устройство управления подается сигнал переполнения, по которому ключ Кл1 устанавливается в положение2.
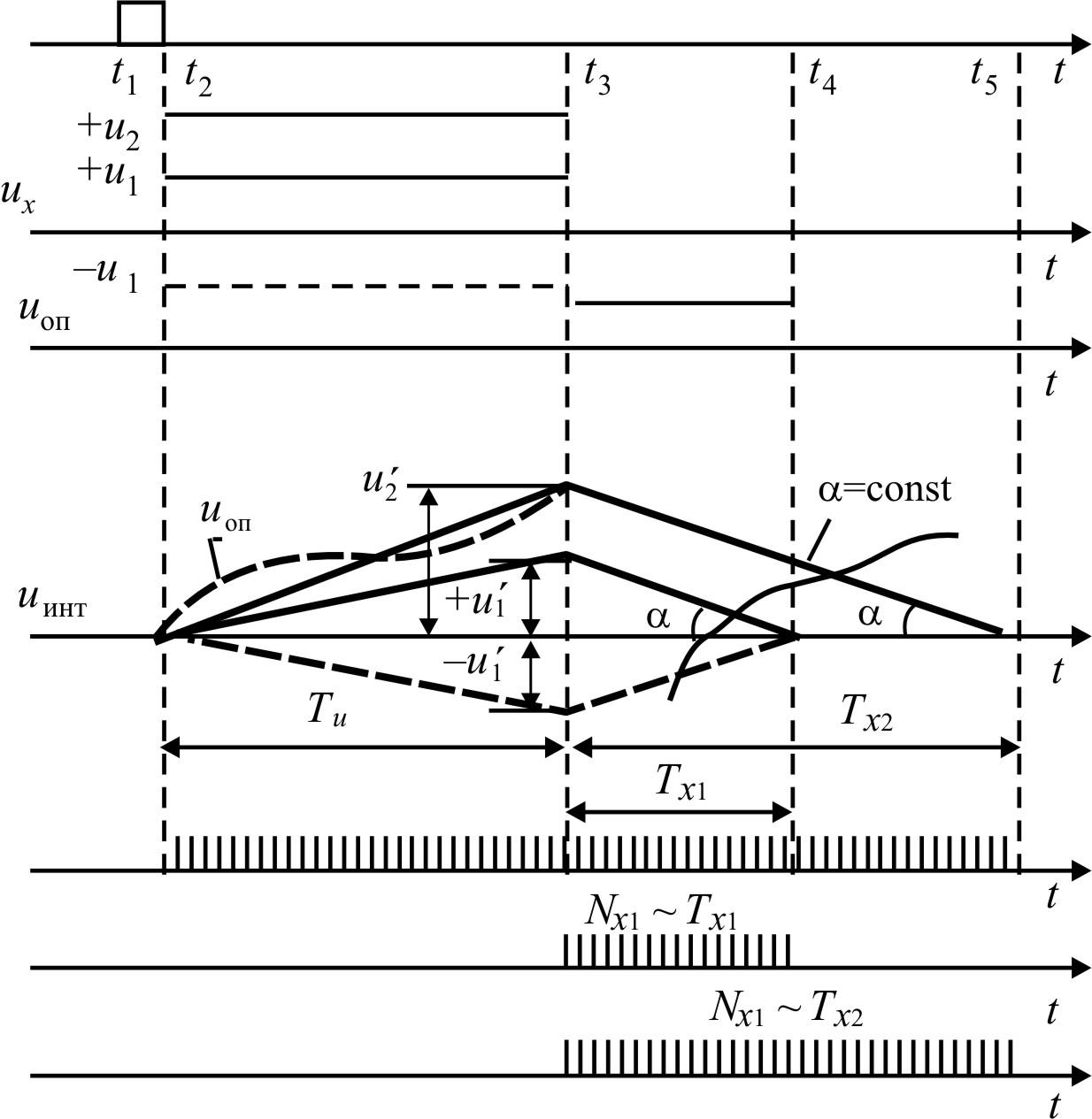
Рис. 2.22. Временные диаграммы работы вольтметра с двойным интегрированием
В течение интервала Tисостояние счетчика не переносится в запоминающее устройство и не индицируется на цифровом индикаторе.
Интервал интегрирования

формируется из импульсов генератора опорной частоты, и его постоянство определяется стабильностью f0.
Когда ключ Кл1 переключится в положение 2(моментt3), на вход интегратора будет подаваться опорное напряжениеuопс полярностью, противоположнойux(определяется положением ключа Кл3). Начинается второй такт работы прибора, когда напряжение на выходе интегратора начинает уменьшаться от значения +u’1до нуля (моментt4). Моментuинт= 0 определяет устройство сравнения, которое выдает импульс в устройство управления. Устройство управления снимает сигнал со схемы «И», и импульсы с генератора опорной частоты на счетчик не подаются. Число импульсовNx, подсчитанное счетчиком в интервалеTx=t4–t3, пропорциональноux. Оно фиксируется в запоминающем устройстве и индицируется на цифровом индикаторе до прихода следующего импульса запуска.
На рис. 2.22 показано, как изменяются напряжение на интеграторе и временной интервал Txдля различных значенийux– положительногоu1(толстая линия), отрицательногоu1(пунктирная линия), положительногоu2, в 2 раза превышающегоu1(тонкая линия). Наклон интегратора (угол) при разряде постоянен, так как постоянны напряжение и постоянная времени интегратора, это и дает возможность получить время разряда интегратораTx, пропорциональноеux.
На рис. 2.22 показан также процесс интегрирования ux=u2+uп. При равенстве периода помехиTпиTинапряжение помехиuпне оказывает влияние на значениеu’2и, следовательно, наTx2.
Погрешность измерения данным методом определяется нестабильностью uоп, нестабильностью порога срабатывания устройства сравнения, определяющего равенствоuинт= 0, влиянием остаточных параметров аналоговых ключей, коммутирующихuxиuоп, кратковременной нестабильностьюf0иTи.
Практически все современные цифровые вольтметры (ЦВ) строятся на основе метода двойного интегрирования. ЦВ, реализованные на этом методе, имеют погрешность измерений 0,02…0,005 %, подавлениепомех нормального вида 40…60 дБ, общего вида 100…160 дБ. С целью наибольшего подавления помех нормального вида с частотой сети (50 и 400 Гц)интервал интегрирования Tи выбирают кратным периоду этой сетевой помехи Tп (Tи = nTп, n = 1,2…). Для поддержания равенства Tи = nTпв ЦВ применяют систему автоподстройки частоты, которая поддерживает указанное равенство с требуемой точностью.
Достоинства: подавление напряжения помехи, получение высокой точности при относительной простоте схемы, возможность полной реализации на ИМС.