

§ 1.3. Электромагнитные явления в электрических аппаратах
Эквивалентное комплексное сопротивление обмотки
Z = Rýê + jXýê , |
(1.175) |
ãäå |
|
Rýê = R + Rï |
(1.176) |
–ее эквивалентное активное сопротивление. Комплексное напряжение питания
U = URýê + UeX, |
|
(1.177) |
|
и его действующее значение |
|
. |
(1.178) |
U = Ö`````````U + U |
|||
2 |
2 |
|
|
Rýê |
eX |
|
|
Здесь URýê = IRýê.
Суммарные активные потери в магнитной системе
P = IUcosj = IURýê = I 2Rýê , (1.179)
где j – угол сдвига фаз между током и напряжением, равный
j = arctg(Xýê ¤ Rýê) . |
(1.180) |
Рассмотрим теперь магнитную систему рис. 1.33,a, содержащую магнитопровод, состоящий из двух (1 è 2) частей, разделенных одинаковыми воздушными зазорами d. На левой части магнитопровода расположена первичная обмотка с N витками. К обмотке подведено напряжение U. На правой части магнитопровода расположена вторич- ная обмотка (электромагнитный экран) с числом витков Ný. Рассмотрим работу такой магнитной
Рис. 1.32. Магнитная система переменного тока в виде тороидального магнитопровода с равномерно намотанной обмоткой (à), ее полная векторная диаграмма (á) и схема магнитной цепи (â)
Рис. 1.33. К анализу магнитной системы переменного тока с двумя воздушными зазорами и электромагнитным экраном без учета рассеяния и магнитного сопротивления магнитопровода:
à – магнитная система; á – полная векторная диаграмма; â – схема магнитной цепи
49

Гл. 1. Основные физические явления и процессы в электрических аппаратах
системы при согласных условно положительных направлениях [23] токов и МДС обмоток (рис. 1.33,a). Обмотки связаны между собой общим магнитным потоком F. Потоками рассеяния обмоток
èмагнитным сопротивлением магнитопровода пренебрежем.
Условно положительное направление потока F также можно выбрать произвольно. Здесь и далее будем его связывать правилом правого винта с током первичной обмотки.
Для электрических цепей первичной обмотки
èэкрана можно записать:
U = IR + Ue ; |
(1.181) |
Ue = -E = jwNF ; |
(1.182) |
Uý = Eý = IýRý = -jwNýF . |
(1.183) |
Для магнитной цепи: |
|
F + Fý = UìR = Uìδýê = FRìδýê , |
(1.184) |
ãäå F = IN, Fý = IýNý, Rìδýê – эквивалентное магнитное сопротивление двух воздушных зазоров d.
По полученным уравнениям на рис. 1.33,á построена полная векторная диаграмма. По действительной оси отложен поток F. От потока отстают на 90° ЭДС E è Eý. Ñ ÝÄÑ Eý, индуктированной в экране, совпадает по направлению [см. (1.182)] ток Iý, а значит и МДС Fý.
Сумма МДС F è Fý дает магнитное напряжение UìR = Uìδýê на активном сопротивлении Rìδýê. Ýòî
напряжение совпадает по фазе с потоком F [см.(1.184)].
Из (1.184) и векторной диаграммы следует, что вектор F имеет активную UìR и реактивную UìX составляющие:
F = UìR + UìX , |
(1.185) |
ãäå |
|
UìX = -Fý . |
(1.186) |
Замена Fý на реактивное магнитное напряжение UìX равносильна замене ее на реактивное магнитное сопротивление экрана Xì.ý, поток в котором отстает от магнитного напряжения на 90°:
UìX = j FXì.ý . |
(1.187) |
Таким образом исследуемая магнитная цепь формально приводится к магнитной цепи с одной обмоткой (рис. 1.33,â). Из (1.183) следует:
|
Iý = wNýF ¤ Rý . |
(1.188) |
||
Òàê êàê UìX = Fý = IýNý, òî |
с учетом |
(1.187) |
||
и (1.188) имеем |
|
|
|
|
X |
= I N ¤ F = wN2 |
¤ R . |
(1.189) |
|
ì.ý |
ý ý |
ý |
ý |
|
Тогда (рис. 1.33,â ): |
|
|
|
Zì = Rìδýê + jXì.ý . |
(1.190) |
Íà ðèñ. 1.33,á вектор Ue аналогично предыдуще- |
||
му случаю |
(ðèñ. 1.32,á) разложен на две состав- |
|
ляющие: |
активную UeR = IRï è |
реактивную |
UeX = jIXýê = jIwLýê. Сравнивая векторные диаграммы рис. 1.32,á è ðèñ. 1.33,á, приходим к выводу, что для магнитной системы с экраном при принятых допущениях остаются справедливыми (1.172)– (1.180). Следует только учитывать, что в (1.173) и (1.174), применительно к магнитной системе, изображенной на рис. 1.33,a, при принятых допущениях
L0 = N 2 ¤ Rìδýê; g = arctg (Xì.ý ¤ Rìδýê).
Если построить с учетом диаграммы рис. 1.33,á кривые изменения во времени потока, а также ЭДС и токов в первичной обмотке и экране, то можно убедиться, что при принятых допущениях большую часть времени действительные направления МДС первичной обмотки и экрана встречны, а меньшую – согласны. Встречное направление МДС означает, что в эти моменты времени действительное направление тока Iý противоположно предварительно принятому на рис. 1.33,a условно положительному
направлению. |
|
|
|
Сравнение |
векторных |
диаграмм |
ðèñ. 1.32,á |
è ðèñ. 1.33,á |
показывает |
их структурную иден- |
|
тичность. Следовательно, |
анализируя |
магнитную |
|
систему с экраном при учете активного и реактивного магнитных сопротивлений магнитопровода, а также магнитного сопротивления воздушных зазоров и пренебрежении рассеянием первичной обмотки и экрана, можно использовать уже известные (1.172)–(1.180). Необходимо только учитывать, что тогда (1.172) примет вид:
L0 = N 2 ¤ (Rì.ýê + Rì.ì), ãäå g = arctg [(Xì.ý + Xì.ì) ¤ (Rìδýê + Rì.ì)].
Комплексное магнитное сопротивление в этом случае:
Zì = (Rìδýê + Rì.ì) + j(Xì.ý + Xì.ì) . (1.191)
Анализ магнитной системы переменного тока с учетом потоков рассеяния первичной обмотки и экрана, а также разветвленных магнитных систем переменного тока более сложен и не является предметом рассмотрения в данном учебнике. С этими вопросами можно ознакомиться в [19, 23].
Магнитные системы с постоянными магнитами.
Постоянные магниты – это тела, выполненные из специальных сплавов или изготовленные путем спекания частиц различных материалов, которые, будучи намагниченными, способны за счет запа-
50
§ 1.3. Электромагнитные явления в электрических аппаратах
сенной магнитной энергии служить источником магнитного поля.
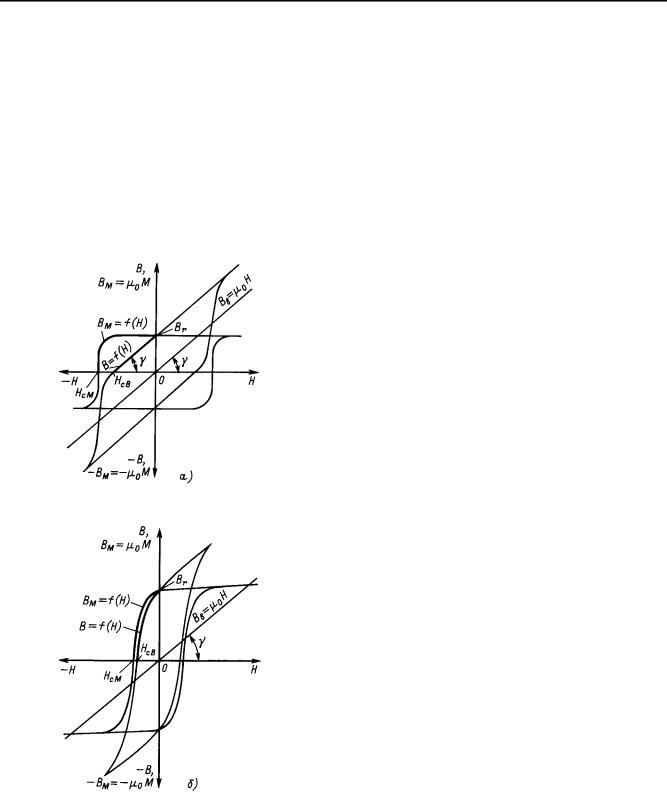
Важнейшей характеристикой материала постоянного магнита является кривая размагничивания, представляющая собой часть предельной петли гистерезиса B = f (H ) этого материала, расположенная во втором квадранте осей B è H.
Существует и другие разновидности кривой размагничивания: BÌ = f (H ), ãäå BÌ = m0M – индукция намагниченности Ì материала, и M = f (H ).
Если известна одна из этих характеристик, то другую можно построить на основании выражения (1.69).
Рис. 1.34. Предельные петли гистерезиса и кривые размагничи- вания BM = f (H ) è B = f (H ) для закритического (à) и докрити- ческого (á) материалов
Процедура построения иллюстрируется рис. 1.34,a,á, на котором по оси ординат отложены B
èBÌ. Пусть задана петля гистерезиса BÌ = f (H )
èнадо построить петлю гистерезиса B = f (H ). Из начала координат проводят прямую, характеризующую поле в вакууме Bâ = m0H, угол наклона g кото-
ðîé ê îñè H определяется выражением
tgg = |
Bâ |
= |
μ0 |
, |
(1.192) |
|
HK |
K |
|||||
|
|
|
|
|||
|
ì |
|
ì |
|
|
ãäå Kì = mB ¤ mH – отношение масштабов по осям B
èH.
Âпервом квадранте BÌ, Bâ è H положительны. Поэтому кривая B = f (H) здесь проходит выше
кривой BÌ = f (H). Во втором квадранте BÌ положительна, а H è Bâ отрицательны; кривая B = f (H) проходит ниже кривой BÌ = f (H).
Практически прямоугольной может быть только
кривая размагничивания BÌ = f (H ). Соответствующая ей кривая размагничивания B = f (H ) при широкой петле BÌ = f (H ) представляет в этом случае линию, наклоненную к оси H на угол g, тангенс которого определяется из (1.192) (рис. 1.34,a).
Важнейшими параметрами кривых размагничи- вания являются остаточная магнитная индукция Br и коэрцитивная сила по индукции HcB или по намагни- ченности HñÌ (рис. 1.34). Всегда HñÌ больше HcB.
Чем выше у материала значение HñÌ, тем существенней разница между HñÌ è HcB (сравни рис. 1.34,a è ðèñ. 1.34,á).
Допустим, что HñÌ = ¥. Тогда при прямоугольной петле гистерезиса BÌ = f (H) BÌ = Br = const и во втором квадранте B = BÌ - m0H = Br - m0H. Íî ïðè B = 0 H = HcB, которая в этом случае достигает своего предельно возможного значения
HcBïðåä = Br ¤ m0 . |
(1.193) |
|||
Отношение |
|
|
|
|
Θ = |
μ0HcB |
|
(1.194) |
|
Br |
||||
|
|
|||
называется магнитной твердостью материала.
Из (1.193) и (1.194) получаем предельное значе- ние магнитной твердости
Θïðåä = m0HcBïðåä ¤ Br = 1 . (1.195)
Существующие магнитотвердые материалы подразделяются на две группы: закритические è докритические.
У материалов первой группы ”колено” левой, ниспадающей части петли гистерезиса лежит в третьем квадранте, а ее участок в пределах второго квадранта прямолинеен (рис. 1.34,a). У материалов
51
Гл. 1. Основные физические явления и процессы в электрических аппаратах
второй группы колено” этой части петли гистерезиса находится” во втором квадранте, и ее участок в пределах второго квадранта имеет вид гиперболы (рис. 1.34,á).
Различие вида кривых размагничивания в основном зависит от отношения m0HcB ê Br. Чтобы кривая размагничивания во всем втором квадранте имела линейный характер необходимо (рис. 1.34,a),
чтобы |
соблюдалось равенство: Br ¤ HcBKì = tgg. |
Тогда |
с учетом (1.192) необходимо, чтобы |
m0HcB ¤ Br = 1. Íî HcM > HcB, поэтому требуется соблюдение условия m0HcM ¤ Br > 1. Åñëè m0HcM ¤ Br < 1, òî ”колено” ниспадающей части петли гистерезиса лежит в третьем квадранте.
Примерами закритических материалов служат магнитотвердые ферриты марок 6БИ240, 15БА300; материал марки КС37 на основе интерметаллического соединения ”самарий-кобальт”; сплавы ”не- одим-железо-бор”. В группу докритических материалов входят сплавы типа альнико и монокристаллы из аналогичных материалов. Например, сплавы марки ЮН14ДК24, ЮНДК35Т5АА, ЮНДК40Т8.
Некоторые марки магнитотвердых ферритов относятся к критическим материалам (промежуточ- ным между закритическими и докритическими),
у которых |
”колено” кривой |
размагничивания |
B = f (H) находится на границе |
второго и третьего |
|
квадрантов (марки 18БА220, 22БА220). Материал марки КСП37 на основе соединения самарий-ко- бальт можно отнести также к критическим.
Для использования постоянного магнита необходимо, чтобы он в магнитной системе был с воздушным зазором . Составляющая МДС постоянного магнита, затрачиваемая на проведение потока в этом зазоре, называется свободной МДС (падением магнитного напряжения в магнитопроводе здесь и далее пренебрегаем). При отсутствии зазора (магнитная система замкнута, индукция в постоянном магните равна Br) вся МДС постоянного магнита расходуется на проведение потока по постоянному магниту (здесь также пренебрегаем падением магнитного напряжения в магнитопроводе)
F = Hclï.ì , |
(1.196) |
ãäå lï.ì – длина постоянного магнита.
При наличии воздушного зазора в магнитной системе
F = Fï.ì + Fδ . |
(1.197) |
Здесь Fï.ì è Fδ – доли суммарной МДС магнита F, расходуемые соответственно на проведение потока в постоянном магните и зазоре.
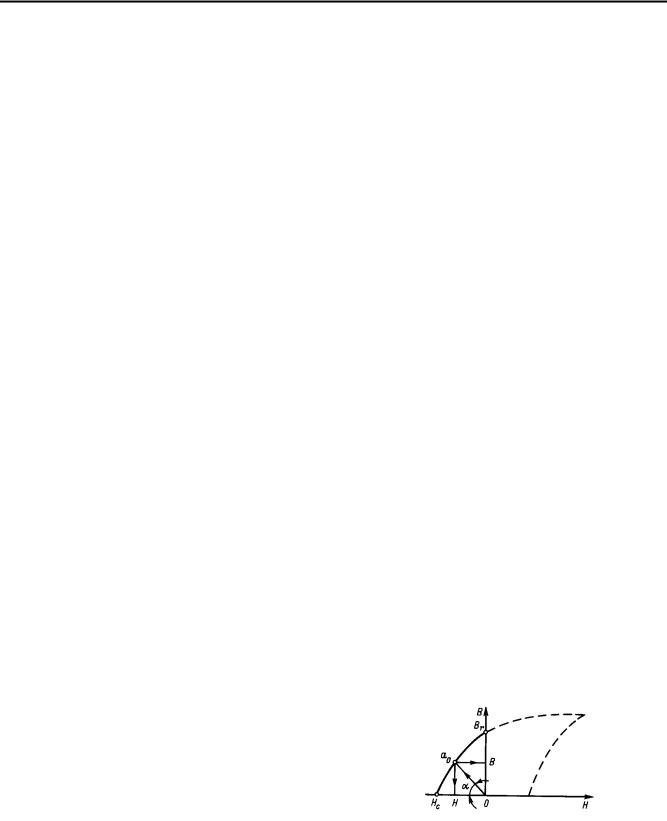
Введение зазора оказывает на постоянный магнит размагичивающее действие, которое предста-
вим в виде размагничивающей напряженности поля H. Тогда индукция в постоянном магните уменьшится с Br äî B [см. точку a0 на кривой размагничивания B = f (H ) (рис. 1.35)]. Если пренебречь рассеянием, то поток в воздушном зазоре Fδ равен потоку в постоянном магните Fï.ì:
Fδ = FδLδ = Hlï.ìLδ = Fï.ì = BSï.ì , (1.198)
ãäå Lδ – магнитная проводимость зазора; Sï.ì – площадь поперечного сечения постоянного магнита.
Из рис. 1.35 с учетом (1.196) следует |
|
|||||||||
|
B 1 |
= |
Λδlï.ì |
1 |
= tg a . |
(1.199) |
||||
|
|
|
|
|
|
|
|
|||
|
H K |
S |
ï.ì |
|
K |
|||||
|
|
|
|
|
||||||
ì |
|
|
ì |
|
|
|||||
Таким образом, имея кривую размагничивания постоянного магнита, его размеры lï.ì, Sï.ì è çíàÿ Lδ, можно, пользуясь (1.199), вычислить поток в зазоре. Для этого необходимо провести на диаграмме рис. 1.35 прямую из начала координат под углом
æ |
Λδl |
ö |
|
a = arctg ç |
ï.ì |
÷ . |
(1.200) |
|
|||
èSï.ìKìø |
|
||
Эта прямая называется линией проводимости. Точка пересечения линии проводимости с кри-
вой размагничивания B = f (H ) определяет значе- ния B è H в постоянном магните
По найденной индукции B из (1.198) находят потоки в постоянном магните и зазоре (при пренебрежении рассеянием). При учете рассеяния в (1.200) необходимо подставить в формулу не проводимость Lδ, а суммарную проводимость всей магнитной
системы с постоянным магнитом. Тогда получаемое значение индукции B соответствует нейтральному сечению постоянного магнита. В этом же сечении Fï.ì = BSï.ì , а поток в воздушном зазоре
Fδ = |
Φï.ì |
= |
BSï.ì |
, |
(1.201) |
sΣΦ |
sΣΦ |
ãäå σΣΦ – суммарный коэффициент рассеяния магнитной системы по потоку.
При проектировании магнитной системы с постоянным магнитом стремятся к максимальному использованию материала постоянного магнита,
Рис. 1.35. Определение координат рабочей точки постоянного магнита на кривой размагничивания
52

§ 1.3. Электромагнитные явления в электрических аппаратах
сводящемуся к получению максимального значе- ния отдаваемой им свободной (внешней) магнитной энергии.
Магнитная энергия, сосредоточенная в воздушном зазоре
W = |
ΦδFδ |
. |
(1.202) |
ì |
2 |
|
r = |
B |
= K tgg ¢ |
(1.206) |
|
|
||||
b |
|
H |
ì |
|
|
|
|
|
|
называется коэффициентом возврата. |
|
|||
Предельное значение |
коэффициента |
возврата |
||
с учетом tgg ¢ = tgg и (1.192): |
|
|||
|
rb.ïðåä = m0 . |
(1.207) |
||
Принимая, что Fδ = Fï.ì = BSï.ì (без учета рассеяния) и допуская коллинеарность и постоянство B è H по всему объему магнита Vï.ì, и учитывая Fδ = Hlï.ì, получаем
W = BHlï.ìSï.ì = BHVï.ì . (1.203) |
||
ì |
2 |
2 |
|
||
Материал постоянного магнита характеризуется магнитной энергией, отнесенной к единице его объема, т. е. значением
w = BH . |
(1.204) |
ì |
2 |
|
Пользуясь кривой размагничивания B = f (H ), можно построить кривую wì = f (B ) (рис. 1.36). Эта кривая имеет максимум wì max.
Ïðè HcM = ¥ кривая B = f (H ) в пределах второго квадранта (рис. 1.34,a) является прямой, проходящей через точки Br è HcB. Следовательно предельное значение wì:
wì.ïðåä = (Br ¤ 2) (HcB ¤ 2) ¤ 2 =
=(Br ¤ 2) (Br ¤ 2m0) ¤ 2 = B2r ¤ 8m0. (1.205)
Âпроцессе работы магнитной системы рабочий зазор может меняться, что приводит к изменению магнитной проводимости системы. Допустим, что постоянный магнит, предварительно намагниченный полностью в намагничивающей установке,
после удаления из этой установки ”имел” рабочую точку à0 на кривой размагничивания B = f (H ) (ðèñ.
1.37), которой соответствует угол a1, индукция B и напряженность H. При соединении постоянного магнита с магнитопроводом магнитной системы магнитная проводимость системы увеличивается, чему будет соответствовать новый угол a2 и большая индукция в постоянном магните. Однако увеличение индукции в постоянном магните происходит не по кривой размагничивания, а по некоторой другой кривой a0bc, называемой кривой возврата. При полном замыкании магнитной системы (a = p/2) имели бы индукцию B1. Если магнитопровод удалить, то индукция будет изменяться примерно по кривой cda0. Кривые a0bc è cda0 являются кривыми частных циклов намагничивания и размагничивания. Ширина петли частного цикла обычно невелика, и петлю заменяют прямой a0c, называемой прямой возврата. Отношение
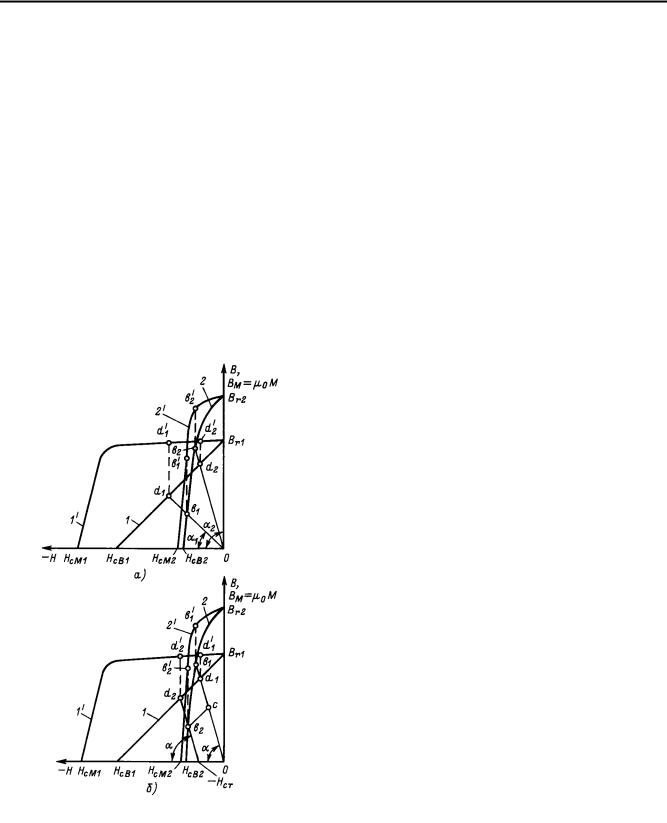
Рассмотрим влияние формы постоянных магнитов на их характеристики. На рис. 1.38,a приведены две пары кривых размагничивания: 1 è 2 – зависимости B = f (H ) соответственно для закритического и докритического материалов; 1¢ è 2¢ – зависимости Bì = f (H ) для этих же материалов.
Линия проводимости Od1, проведенная под углом a1, соответствует постоянному магниту в форме тонкой пластинки, намагниченной перпендикулярно к ее плоскости. Линия проводимости Od2, проведенная под углом a2, соответствует постоянному магниту в форме длинного стержня, намагниченного продольно.
Пересечение двух указанных линий проводимости с кривой размагничивания 1 дает точки d1 è d2, которым на кривой размагничивания 1¢ соответствуют точки d1¢ è d2¢. Последние находятся на практически горизонтальном участке зависимости
Рис. 1.36. К определению свободной магнитной энергии постоянного магнита
Рис. 1.37. Кривые и линия возврата материала постоянного магнита
53
Гл. 1. Основные физические явления и процессы в электрических аппаратах
Bì = f (H ) – кривая 1′. Поэтому значения намагни- ченности M в них одинаковы. Таким образом, магнитный момент постоянного магнита mï.ì, равный (при допущении одномерности поля M) ò M dV, при использовании закритического мате-
V
риала изменяется лишь при изменении объема V магнита и практически не зависит от его формы.
Рассмотрим постоянный магнит из докритического материала. Пересечение тех же линий проводимости с кривой размагничивания 2 дает точки b1 è b2, которым на кривой размагничивания 2′ соответствуют точки b1′ è b2′. Как видно, в этом случае намагниченность и, следовательно, магнитный момент существенно зависят от формы постоянного магнита.
Проанализируем влияние стороннего (внешнего) магнитного поля на постоянные магниты, выполненные из тех же двух видов материалов. Пусть постоянный магнит изготовлен из закритического
Рис. 1.38. Влияние формы постоянного магнита (à) и стороннего магнитного поля (á) на характеристики магнитов, выполненных из закритического и докритического материалов
материала и имеет форму, которой соответствует линия проводимости с углом α (ðèñ. 1.38,á). Тогда рабочая точка постоянного магнита на кривой 1 при отсутствии стороннего поля находится в положение ”d1”, а на кривой 1′ – в положение ”d1′”. Как видно из рис. 1.38,á , принятое значение размагни- чивающего поля практически не изменило намагниченность постоянного магнита из закритического материала, а, следовательно, и его магнитный момент.
Проведение аналогичного анализа с постоянным магнитом, выполненным из докритического материала (кривые 2 è 2′) показывает, что воздействие такого же размагничивающего поля вызывает
значительное изменение намагниченности |
(сравни |
точки b1 è b2 на кривой 2′) в постоянном |
магните |
и его магнитного момента. |
|
При снятии воздействия поля (– Hñò) постоянный магнит из закритического материала восстанавливает свои характеристики, так как рабочая точка на кривой 1 из положения ”„d2” практически возвращается в положение ”d1”. Магнит же из докритического материала не восстанавливает свои характеристики, так как возврат рабочей точки из положения ”„b2” происходит не по кривой 2, т. е. не в положение ”b1”, а по линии возврата b2–c в положение ”„c”.
Поляризованные магнитные системы. Поляризованные магнитные системы отличаются от неполяризованных, например, от уже рассмотренной (см. рис. 1.30,a), тем, что они имеют два вида источника магнитного поля – поляризующий и управляющий. Источником поляризующего поля в большинстве случаев являются постоянные магниты, но иногда для этой цепи используется специальная обмотка с током. Управляющее поле создается МДС управляющей обмотки. Основной отличительной особенностью поляризованной магнитной системы является зависимость ее действия не только от значе- ния, но и от направления тока в управляющей обмотке. При отсутствии тока в этой обмотке на подвижную часть магнитной системы – якорь действует электромагнитная сила, создаваемая поляризующим полем.
Применение постоянного магнита позволяет получить фиксированное положение якоря независимо от наличия или отсутствия источника тока и исключает потребление энергии в нерабочий период. Наличие поляризующего поля определяет также высокую чувствительность и быстродействие электрических аппаратов на основе поляризованных магнитных систем. Это связано главным образом с тем, что при срабатывании этих аппаратов магнитное поле не создается вновь полностью,
54
§ 1.3. Электромагнитные явления в электрических аппаратах
а происходит только перераспределение магнитных потоков.
Поляризованные магнитные системы являются основой высокочувствительных быстродействующих реле, электромагнитных преобразователей электрического сигнала в пропорциональное угловое или линейное перемещение, быстродействующих автоматических выключателей, блокирующих устройств и т. д.
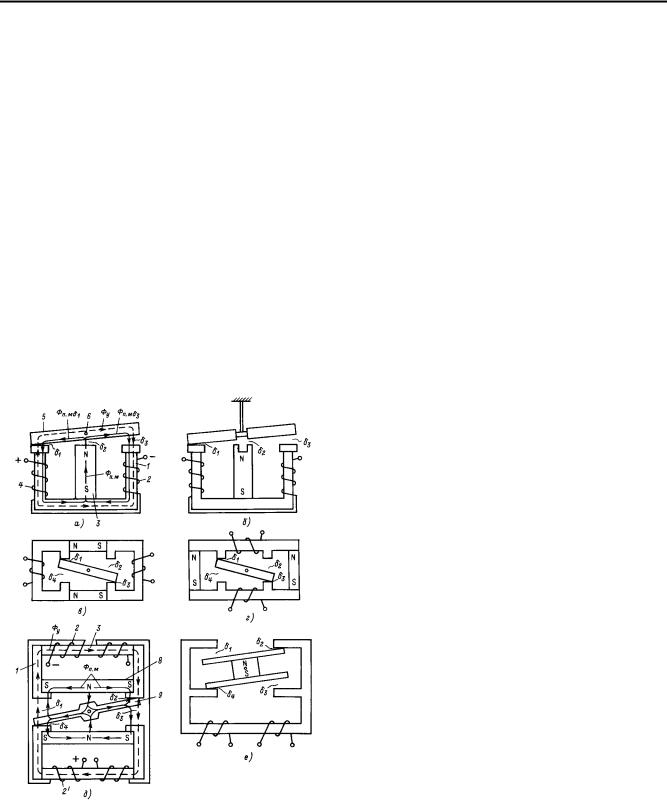
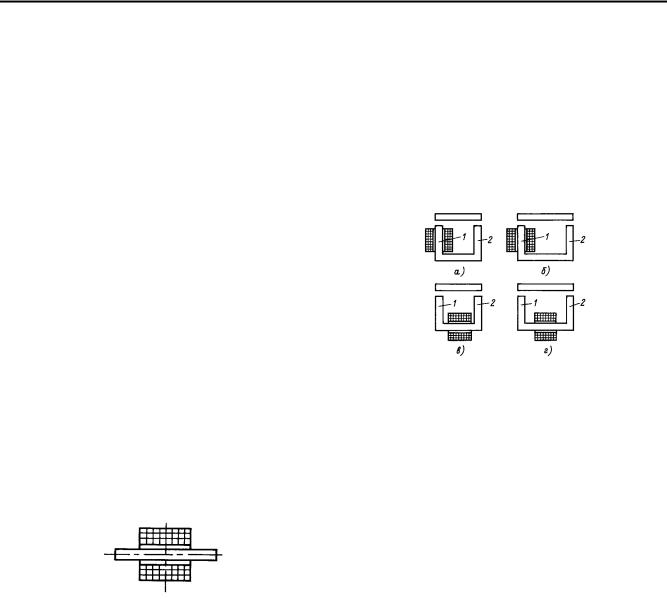
Существует большое разнообразие поляризованных магнитных систем. В зависимости от схемы магнитной цепи они делятся на магнитные системы с последовательной, дифференциальной è мостовой магнитными цепями [17, 22, 23]. Каждая из этих групп имеет много разновидностей. В настоящее время наибольшее распространение получили магнитные системы с дифференциальными и мостовыми магнитными цепями. Некоторые из них приведены на рис. 1.39.
В качестве примера рассмотрим принцип действия одной из дифференциальных магнитных систем (рис. 1.39,a). Она состоит из магнитопровода 1, на котором размещены две (2 è 4) обмотки управ-
Рис. 1.39. Примеры дифференциальных (à, á ) и мостовых (â–å) схем поляризованных магнитных систем
ления, включенные последовательно и согласно. С магнитопроводом жестко скреплен постоянный магнит 3, создающий поляризующий магнитный поток Φï.ì (обозначен сплошными линиями). Якорь 5 может поворачиваться на оси 6 в подшипниках (не показаны на рисунке). Поток Φï.ì проходит через воздушный зазор δ2 в якорь и затем разветвляется на два потока (Φï.ìδ1 è Φï.ìδ3), прохо-
дящие соответственно через воздушные зазоры δ1 è δ3. При отсутствии тока в обмотках и горизонтальном положении якоря действующие на него электромагнитные силы в зазорах δ1 è δ3 одинаковы. Якорь при этом находится в неустойчивом положении: при незначительном повороте якоря (например, против часовой стрелки, т. е. в сторону уменьшения зазора δ1 и увеличения зазора δ3) электромагнитная сила в зазоре δ1 увеличится, а в зазоре δ3 уменьшится. В результате якорь переходит в положение, изображенное на рис. 1.39,à.
После включения обмоток с полярностью, показанной на рисунке, создается управляющий магнитный поток Φó (обозначен штриховыми линиями), проходящий последовательно через зазоры δ1 è δ3. При этом в зазоре δ1 происходит вычитание потоков Φï.ìδ1 è Φó, а в зазоре δ3 – сложение потоков Φï.ìδ3 è Φó. При определенной МДС обмо-
ток электромагнитная сила в зазоре δ3 станет больше электромагнитной силы в зазоре δ1, и (при условии отсутствия других сил) якорь повернется по часовой стрелке и займет другое крайнее положение. В этом положении якорь останется и после снятия напряжения с обмоток. Если снова вклю- чить обмотки, но с изменением полярности тока, то якорь перебросится в противоположном направлении.
В дифференциальных схемах на ось якоря (рис. 1.39,à) или плоскую пружинную подвеску (рис. 1.39,á) действуют значительные усилия, причиной которых является воздействие электромагнитных сил на якорь. В первом случае при перемещении якоря в подшипниках возникают значительные силы трения, что отрицательно сказывается на чувствительности аппарата. Во втором случае те же усилия, вызывают не только изгиб пружины, но и ее растяжение, что приводит к необходимости применять для пружины материалы с высоким временным сопротивлением разрыву. Мостовые схемы (рис. 1.39,â–å) этим недостатком не обладают. Еще одним из недостатков дифференциальных схем является невозможность полного разделения поляризующего и управляющего потоков в якоре. Это вызывает необходимость увеличения площади поперечного сечения и, следовательно, массы якоря,
55
Гл. 1. Основные физические явления и процессы в электрических аппаратах
что снижает быстродействие аппарата и его устой- |
как минимум четырьмя такими зазорами (δ1, δ2, δ3, |
чивость к внешним механическим воздействиям. |
δ4 íà ðèñ. 1.39,â–å). Это в ряде случаев (см., напри- |
В некоторых мостовых схемах (например, рис. |
ìåð, ðèñ. 1.39,å) дает возможность уменьшить |
1.39,â–ä) один из потоков (управляющий или по- |
примерно вдвое магнитное сопротивление управ- |
ляризующий) направлен вдоль якоря, а второй – |
ляющему потоку по сравнению с аналогичным со- |
поперек. |
противлением схем с двумя зазорами, так как маг- |
В отличие от дифференциальных схем, имею- |
нитные сопротивления зазоров на пути управляю- |
щих практически только два рабочих зазора (δ1 è δ3 |
щего потока в первом случае расположены попарно |
íà ðèñ. 1.39,à ), мостовые схемы характеризуются |
параллельно (δ1 è δ4, а также δ2 è δ3). |
Контрольные вопросы
1.Почему любое векторное поле можно представить в виде суммы двух элементарных составляющих: вихревой и потенциальной?
2.Какие дополнительные источники возникают в переменном электромагнитном поле по сравнению со стационарном магнитном полем?
3.Какие методы расчета электромагнитных сил Вы знаете?
4.Объясните процесс намагничивания предварительно размагниченного ферромагнитного тела.
5.Какие магнитные материалы Вы знаете? Их свойства?
6.Изобразите на предельной петле гистерезиса частные несимметричные гистерезисные циклы, расположенные в первом и третьем квадрантах.
7.В какой части магнитопровода указанной магнитной системы магнитный поток имеет наибольшее значение? Что надо предпринять, чтобы измерить этот поток? Отличается ли этот поток от максимального потока системы?
8.В какой из магнитных систем наименьший магнитный поток рассеяния, если допустить, что он замыкается только между стержнями 1 è 2? МДС у всех систем одинакова.
9.Изобразите зависимость действующего значе- ния тока в обмотке магнитной системы, подключенной к источнику переменного напряжения, от рабочего зазора.
10.Что учитывает реактивная составляющая комплексного магнитного сопротивления?
11.Что понимается под линией возврата при функционировании постоянного магнита?
12.Как определяется свободная магнитная энергия единицы объема постоянного магнита? Что такое ”максимальная свободная магнитная энергия”?
13.Объясните принцип действия поляризованной магнитной системы:
а) с дифференциальной магнитной цепью? б) с мостовой магнитной цепью?
14.Чем объясняется более высокая чувствительность электрических аппаратов с поляризованной магнитной системой по сравнению с аппаратами с неполяризованной системой?
56