

3.3.Инверторный режим работы тиристорных преобразователей.
Инвертированием называется процесс преобразования электрической энергии постоянного тока в энергию переменного тока. Термин “инвертирование” происходит от латинского inversio - переворачивание, перестановка. Впервые этот термин в преобразовательной технике был применен для обозначения процесса, обратного выпрямлению, при котором поток энергии изменяет свое направление на обратное и поступает от источника постоянного тока в сеть переменного тока. Такой режим был назван в противоположность выпрямительному режиму инверторным, а преобразователь, осуществляющий процесс передачи энергии от источника постоянного тока в сеть переменного тока, - инвертором. Поскольку электрические параметры преобразователя на стороне переменного тока (частота переменного тока, действующее значение напряжения) в этом случае полностью определяются параметрами сети, то такой инвертор называют зависимым, или ведомым сетью.
Исторически термин “инвертор” в преобразовательной технике распространился на все виды статических преобразователей электрической энергии постоянного тока в переменный.
Источник и приемник энергии постоянного тока.
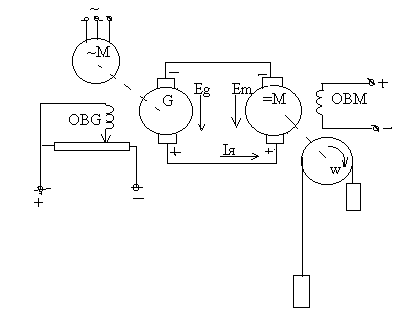
Рис 20
Для рассмотрения и выяснения признаков источника и приемника электрической энергии рассмотрим работу электромашинной системы, используемой на подъемных установках, например, шахтных подъемников. Иногда на шахтах возникает необходимость выполнить, так называемую операцию “перегон порожних подъемных сосудов”.
В исходном состоянии правый подъемный сосуд находится в верхнем положении, левый- в нижнем. Цель “перегона”- поменять подъемные сосуды местами: правый- переместить вниз, левый- поднять вверх. Вес пустых подъемных сосудов одинаков и они уравновешивают друг друга, если не учитывать веса подъемного каната. Но не учитывать этого веса нельзя, т.к. на глубоких шахтах он может иметь большие значения (до нескольких тонн). В начале “перегона” электрическая машина “=М”должна развивать двигательный момент для движения вверх “левого” сосуда вместе с тяжелым подъемным канатом. Когда подъемные сосуды окажутся в середине шахтного ствола, напротив друг друга, левая и правая ветви уравновесятся, а при дальнейшем движении правая, более длинная ветвь каната, спускаясь, будет раскручивать шкив “Ш ”, а значит, и якорь машины “=М”, под действием спускаемого подъемного сосуда и более длинной ветви каната. Машина “=М”должна оказывать тормозное воздействие на раскручиваемый грузом шкив.
Рассмотрим виды преобразования энергии и направление этой энергии при выполнении операции “перегона”.
В начале этой операции электрическая машина “~М”, потребляя из сети переменного тока электрическую энергию, т.е. работая в режиме электрического двигателя, преобразует ее в механическую энергию вращающегося вала, который вращает якорь электрической машины постоянного тока G. Эта машина, будучи возбужденной, работая в режиме генератора постоянного тока, преобразует полученную механическую энергию в электрическую энергию постоянного тока. Эта энергия, в виде тока и напряжения по проводам поступает на якорь машины “=М”, где преобразуется в механическую энергию вращающегося шкива “Ш” и энергию, необходимую для подъема левого подъемного сосуда вместе с канатом.
Т.о. электрическая энергия потребляется из сети переменного тока, претерпевает ряд преобразований, и, в конечном счете, используется для выполнения механической работы. Назовем такое направление энергии прямым.
Теперь рассмотрим подробнее режимы работы электрических машин постоянного тока “G” и “=М”. Машина “G” работает в режиме генератора постоянного тока. Она создает ЭДС EG, под действием которой создается ток в якорной цепи обеих машин.
В статическом режиме работы ток Iя определяется выражением:
Iя = (EG - EМ )/ Rя.ц.
Такое выражение для тока Iя связано с тем, что ЭДС EМ направлена встречно с ЭДС EG и величина тока зависит от разности этих ЭДС. Т.к. в начале процесса “перегона” груз оказывает тормозящее действие на якорь машины “=М”, ее ЭДС, зависящая от частоты вращения, меньше, чем ЭДС EG и направление тока в якорной цепи совпадает с направлением ЭДС EG.
Эта сонаправленность ЭДС и тока являются единственным признаком источника электрической энергии постоянного тока.
Если же направление ЭДС и тока в каком- то устройстве встречное, то это означает, что перед нами- приемник электрической энергии.
Эти признаки источника и приемника электрической энергии очень важны для понимания физических процессов, происходящих во многих электротехнических устройствах.
По мере перемещения левой ветви каната, с подвешенным к ней подъемным сосудом, вверх происходит снижение нагрузки на вал двигателя “=М”, частота вращения его увеличивается, возрастает ЭДС EМ , что приводит к уменьшению тока Iя . В тот момент, когда ветви каната уравновесятся, когда подъемные сосуды окажутся в середине ствола, сравняются по величине и встречные ЭДС EМ и EG.
Ток в якорной цепи на какое- то мгновение станет равным нулю, что означает, что в данный момент нет ни приемника, ни источника электрической энергии. Она не потребляется и не отдается. Но как только правая ветвь перевешивает левую, спускаемый груз начинает ускорять вращение машины “=М”. Ее ЭДС становится больше, чем ЭДС EG, и в этот момент ток в якорной цепи меняет свое направление. Момент смены направления тока- есть момент перехода приемника энергии “=М” в другое качество. Он становится источником, а машина G- приемником энергии.
С этого момента поток энергии меняет свое направление на обратное. Она вырабатывается в виде механической энергии спускаемого груза, претерпевает обратные, по сравнению с прямым направлением, преобразования и, в конечном счете, поступает в виде электрической энергии в питающую сеть. Таким образом в рассмотренной электромашинной системе (именуемой системой Г- Д) смена режимов работы электрических машин происходит автоматически без каких-либо переключений в схеме, т.е. без вмешательства обслуживающего персонала в работу установки. Движение подъемных сосудов происходит приблизительно с постоянной скоростью, а приводной электродвигатель “=М” обеспечивает на первом этапе пути подъемных сосудов вращательный момент, т.е. работает в двигательном режиме, а на втором, заключительном этапе- тормозной момент, т.е. работает в генераторном режиме.