

5. Оптимальное управление
Оптимальное управление – это частный случай задач вариационного исчисления. Решением этих задач является оптимальная функция управления объектом [6].
5.1. Постановка задачи
Дано:
Объект, описывающийся системой дифференциальных уравнений в фазовых координатах:
 (5.1)
(5.1)
где
yi
– фазовые
координаты (скорость, управление, путь),
![]() – вектор фазовых координат,
– вектор фазовых координат,![]()
![]() – функция управления.
– функция управления.
2. Целевая функция (обычно задается в виде определенного интеграла)
![]() (5.2)
(5.2)
3. Начальные и граничные условия (всего 2n условий, n – порядок системы дифференциальных уравнений).
4. Ограничения на фазовые переменные: Bj(y1, y2,,yп) 0, j = 1,,m.
5. Ограничение на управление: |u| 1, u – приведенный параметр управления.
Пример.
Лифт управляется двигателем постоянного тока. Найти такое управление, при котором лифт доходил бы с одного этажа до другого за минимальное время.
Решение.
Управление
осуществляется током якоря ![]() ,
– угол поворота якоря.
,
– угол поворота якоря.
![]() ,
,
![]() (угловая скорость),
u
i,
(функция управления – ток).
(угловая скорость),
u
i,
(функция управления – ток).
Система уравнений в фазовых координатах:
Целевая
функция
![]() ,T
– время управления.
,T
– время управления.
Граничные условия: у1(0) = – 0, у1(Т) = 0, у2(0) = 0, у2(Т) = 0.
|u| 1 (ток управления лежит в некотором интервале (imin, imax)),
0 – угол, который должен отработать якорь двигателя.
5.2. Классификация задач оптимального управления
1. По виду целевой функции:
– задачи,
оптимальные по быстродействию
![]() ,
,
– задачи,
оптимальные по расходу энергии
![]() ,
,
– задачи, оптимальные по другим критериям.
2. По виду граничных условий:
– задачи с закрепленными концами (рис. 5.1), где начальное и конечное значения – точки на фазовой плоскости;
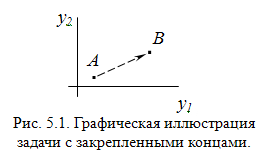
Рис. 5.1. Графическая иллюстарция задачи с закрепленными концами
– задачи с подвижными концами (рис. 5.2), где вместо точек используются какие-либо поверхности.
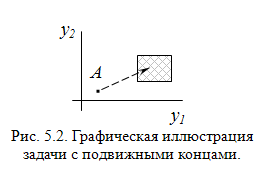
Рис. 5.2. Графическая иллюстарция задачи с закрепленными концами
На рис. 5.1 А = (у1(0), у2(0)) – начальная точка, В = (у1(Т), у2(Т)) – конечная точка. Задача заключается в нахождении такого управления, чтобы система перешла из А в В оптимальным образом (начальная точка считается левой, а конечная – правой).
Если конец подвижный, то граничные условия записываются следующим образом: уi(0) = у0i – координата начальной точки, φi(уi(T))= 0 – конечное условие – поверхность, i = 1,,п.
5.3. Принцип максимума Понтрягина
Принцип максимума Понтрягина позволяет найти оптимальное управление объектом.
Постановка задачи та же (5.1):
![]()
Требуется найти u(t) – функцию управления объектом.
Алгоритм принципа максимума Понтрягина
Введем переменную
![]() (5.3)
(5.3)
Продифференцируем
по времени
![]()
Добавим полученное дифференциальное уравнение к системе, описывающей объект:
 (5.4)
(5.4)
Составляем функцию Гамильтона
![]()
где i – неизвестные функции времени.
3. Находим i из системы дифференциальных уравнений:
![]() (5.5)
(5.5)
Найденные i подставляем в Н.
Находим оптимальное управление u(t), исходя из следующего определения:
Принцип максимума Понтрягина: оптимальным является такое управление u(t), при котором функция Гамильтона достигает максимума.
Найденное u(t) подставляем в систему дифференциальных уравнений фазовых координат (5.4). Находим фазовые координаты как функции времени.
Пример.
Двигатель постоянного тока приводит в движение лифт. Найти такое управление лифтом, при котором лифт, переходя с одного этажа на другой, затрачивал бы минимум энергии.
Решение.
![]()
![]()
![]()
![]()
граничные условия: у1(0) = – 0, у2(0) = 0, у1(Т) = у2(Т) = 0.
1. Составим систему дифференциальных уравнений в фазовых координатах:
2. Запишем функцию Гамильтона:
![]()
3. Найдем функции i из системы дифференциальных уравнений:

![]()
![]() ,
следовательно,
,
следовательно, ![]() .
.
![]() ,
, ![]() ,
, ![]() .
.
![]() ,
, ![]()
![]()
С учетом полученных i функция Гамильтона примет вид:
![]()
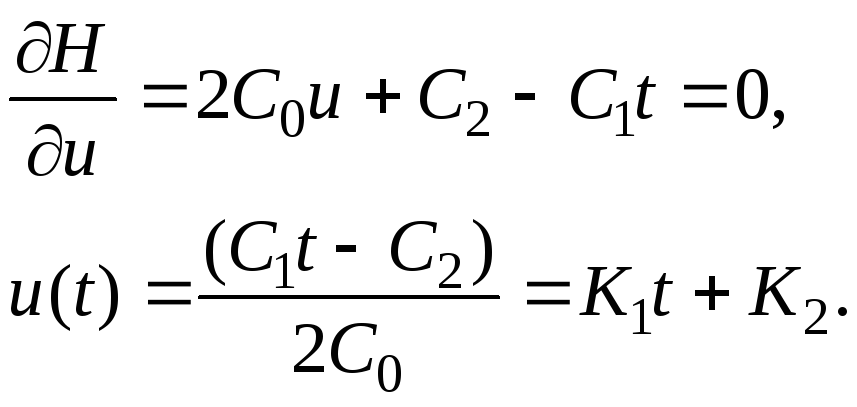
4.
Найдем управление, при котором функция
Гамильтона достигает максимума. Для
этого найдем производную ![]() и приравняем ее
нулю:
и приравняем ее
нулю:
5. Подставляем найденное u(t) в систему дифференциальных уравнений в фазовых координатах:
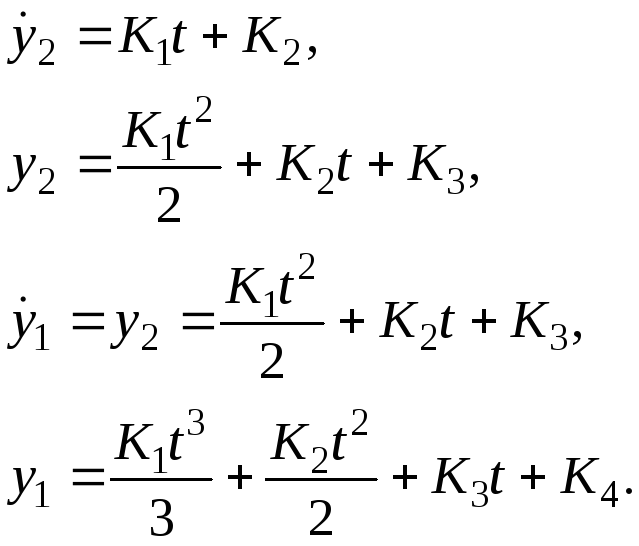
K1,K4 находим из граничных условий: у1(0)= –0, у2(0) = 0, у1(Т) = = у2(Т) = 0.