

минимум / Асинхронный двигатель с короткозамкнутым ротором
.docxАсинхронный двигатель с короткозамкнутым ротором (АД С КЗР)
Устройства, преобразующие электрическую энергию (вход) в механическую (выход), называются электрическими двигателями.
Механическая энергия необходима для работы производственных машин и механизмов.
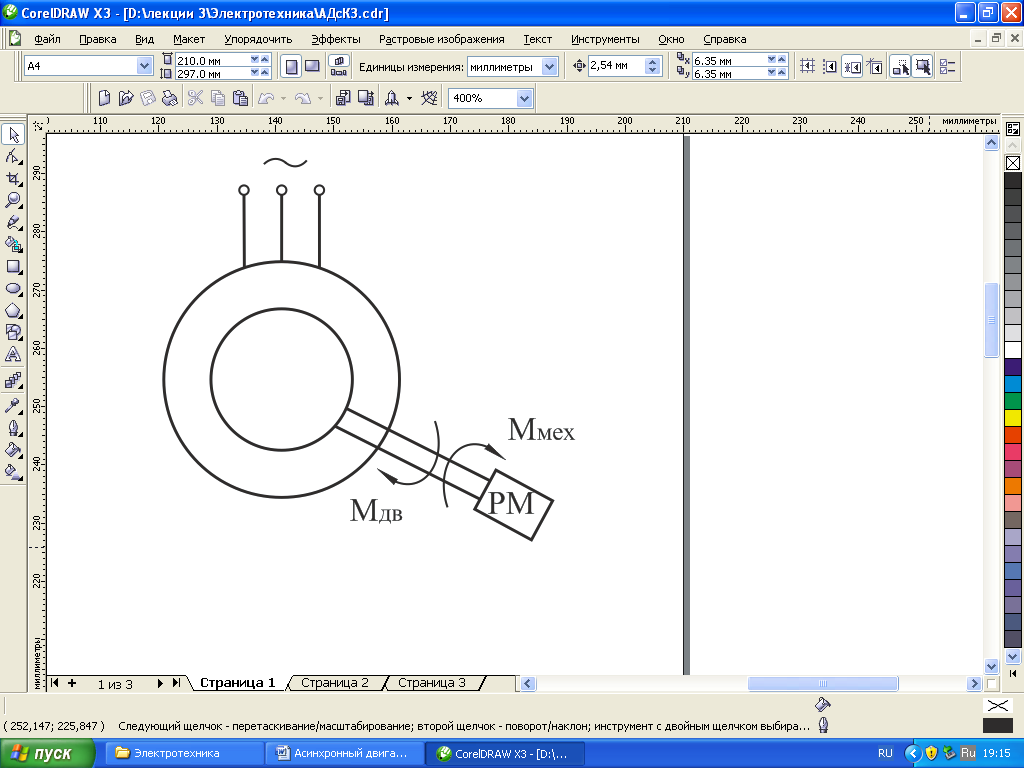
АД состоит из статора (неподвижной части) и ротора (подвижной части).
-
В статор входят: корпус; магнитопровод (сердечник), состоящий из тонких стальных пластин; три обмотки (катушки), смещенные между собой на 120°, которые укладываются в пазы магнитопровода.
-
В ротор входят: вал, магнитопровод, короткозамкнутая (в виде беличьей клетки) обмотка.
Условное обозначение
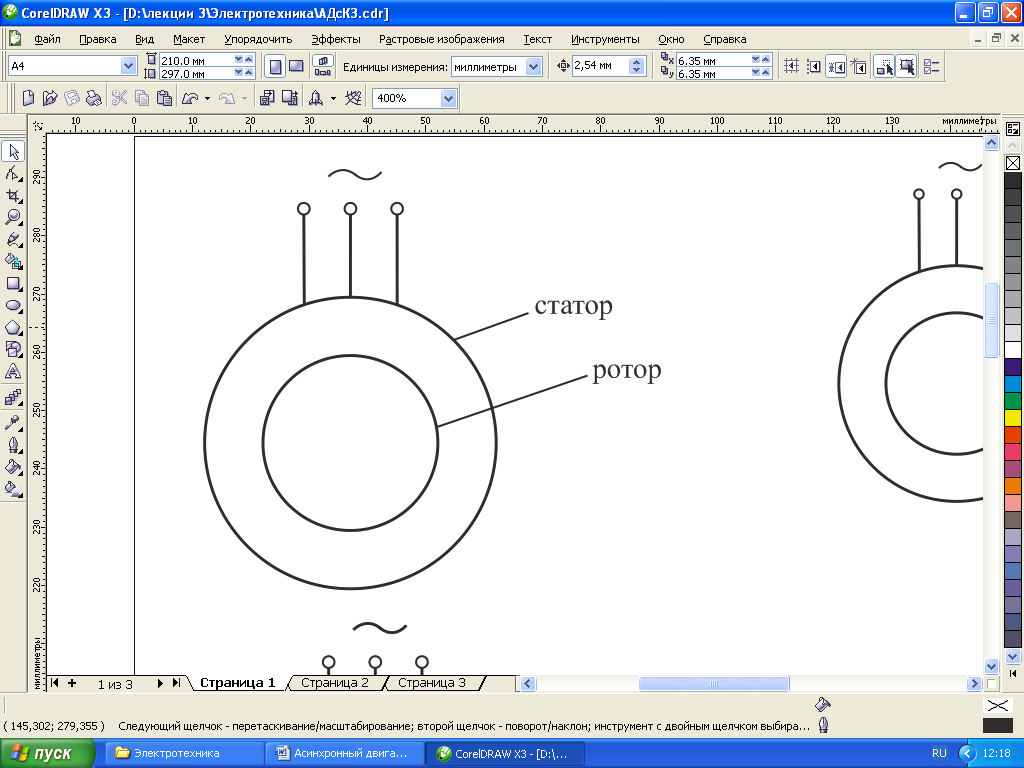
К ротору подсоединяется производственный механизм, который является нагрузкой на двигатель.
Достоинства двигателя: простой, дешевый, надежный.
Недостатки: плохие пусковые качества, т. е. малый пусковой момент, большой пусковой ток, а также потребление из сети реактивного тока.
ПРИНЦИП РАБОТЫ
U1 → I1 → Ф1 (вращающееся магнитное поле) → Е2 (Е1) → I2
В результате взаимодействия I2 с Ф, создается момент М [Нм]
М = КI2Фcosψ2,
где ψ2 — фазовый сдвиг между Е2 и I2, под действием которого ротор приходит во вращение.
В АД имеет место АСИНХРОННОСТЬ (неодинаковость) вращения магнитного поля n1 и ротора n2. Благодаря этой асинхронности движения возникают электрические процессы в роторе (Е2 и I2). Величина асинхронности оценивается скольжением S, в относительных единицах или процентах:
 (1)
(1)
 ,
[%],
,
[%],
n1 — частота вращения магнитного поля.
 ,
,
Pп — число пар магнитных полюсов поля: 1, 2, 3 … и т. д.;
f — частота тока.
Если
fном = 50
Гц, то
 =
3000,
1500,1000 об/мин и т. д. в зависимости от
числа пар полюсов двигателя.
=
3000,
1500,1000 об/мин и т. д. в зависимости от
числа пар полюсов двигателя.
Из
(1) имеем
 .
.
Работа двигателя начинается с n2 = 0 (пуск), тогда
 (максимальное
скольжение).
(максимальное
скольжение).
Теоретически максимальная частота вращения ротора при отсутствии нагрузки n2 = n1, тогда
 .
.
Диапазон изменений S составил от 1 (минимальная скорость ротора) до 0 (максимальная скорость ротора).
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АД — основная характеристика АД, показывающая как изменяется частота вращения ротора под действием нагрузки. Эту характеристику можно получить эксплуатационным или расчетным путем по формулам:
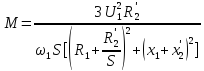 (1)
(1)
или
 (2)
(2)
Задаваясь
в формулах (1) и (2) S
 [0;1],
можно
найти n.
[0;1],
можно
найти n.
Задаваясь нагрузкой М можно найти скольжение, а, следовательно, и n2.
Эта механическая характеристика имеет вид:
|
|
|
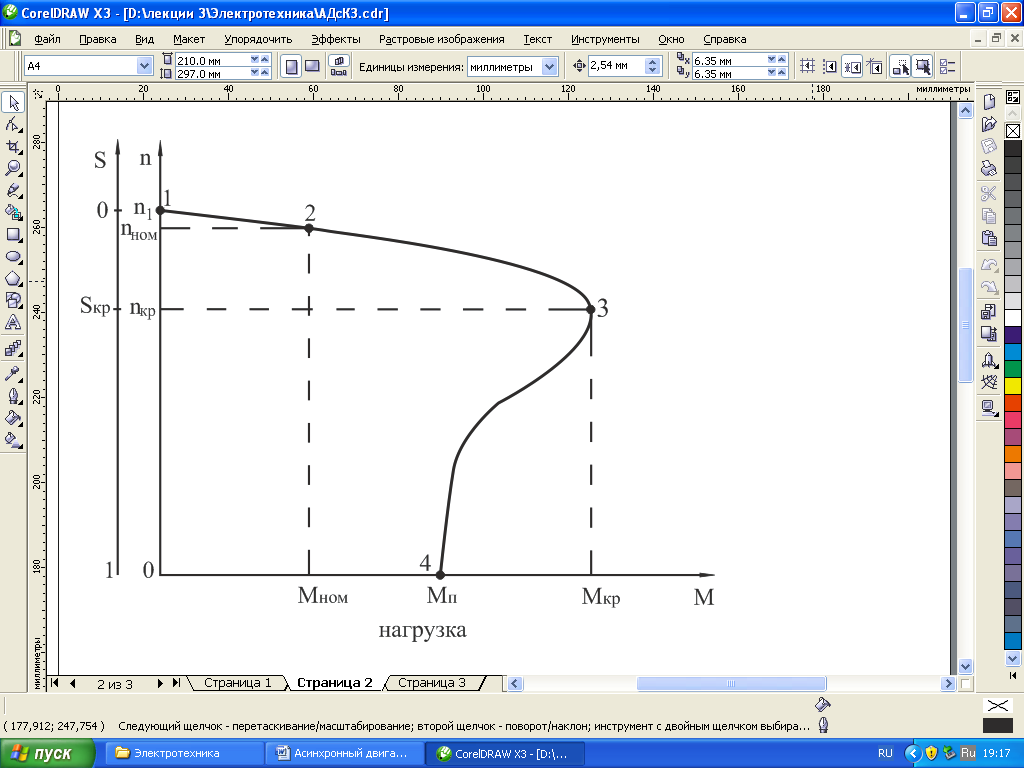
На характеристике можно выделить 4 основных точки и соответственно 3 участка. Рассмотрим эти точки:
-
1 — холостой ход (двигатель вращается без нагрузки).
Координаты этой точки (n2 = n1, М=0);
-
2 — номинальный режим — наступает при нагрузке равной предельно допустимой в условиях длительной работы.
Координаты этой точки (n2 = nном, М=Мном), указываются в паспорте;
-
3 — критическая нагрузка, при которой двигатель развивает максимальный момент.
Координаты этой точки (Sкр или nкр; М=Ммах=Мкр).
При нагрузке большей критической двигатель с ней не справляется, что приводит к остановке;
-
4 — пусковая точка, с этой точки начинается запуск двигателя.
Координаты этой точки (n2 = 0, М = Мп)
Все координаты можно найти по паспортным данным двигателя.
Участки 1-3 — устойчивая работа, при нагрузке двигателя от 0 до Мкр двигатель обладает способностью подстраиваться под нагрузку и увеличивать свой момент (усилие), что не приводит к остановке двигателя.
3-4 — характеризует разбег двигателя, работа на этом участке неустойчива.
При этом:
1-2 — возможна длительная работа, при которой ток, потребляемый из сети, не превышает предельно допустимого, т. е. номинального.
2-3 — допустима только кратковременная работа, т. к. при таких нагрузках Iдвигателя > Iном и возможен перегрев двигателя.
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА n=f(M), полученная при номинальных условиях работы, т. е. при U=Uном, f=fном и естественной схеме включения (без дополнительных элементов) называется ЕСТЕСТВЕННОЙ.
РЕГУЛИРОВАНИЕ СКОРОСТИ АД С КЗР
Как следует из формулы

на частоту вращения можно влиять, изменяя частоту вращения магнитного поля

Путем изменения частоты питающего напряжения f1 (с помощью специальных преобразователей) или изменением числа пар полюсов Pп (изменяя схему катушек статора).
В обоих случаях величина скольжения практически остается неизменной.
Также частоту вращения двигателя можно изменить, воздействуя на скольжение S. Это можно сделать, изменяя величину напряжения, питающего двигатель, или изменяя сопротивление ротора (если это позволяет конструкция ротора).
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА, полученная при условиях работы, отличающихся от номинальных, называется ИСКУССТВЕННОЙ.
Рассмотрим эти способы.
ВЛИЯНИЕ ЧАСТОТЫ f НА СКОРОСТЬ ДВИГАТЕЛЯ
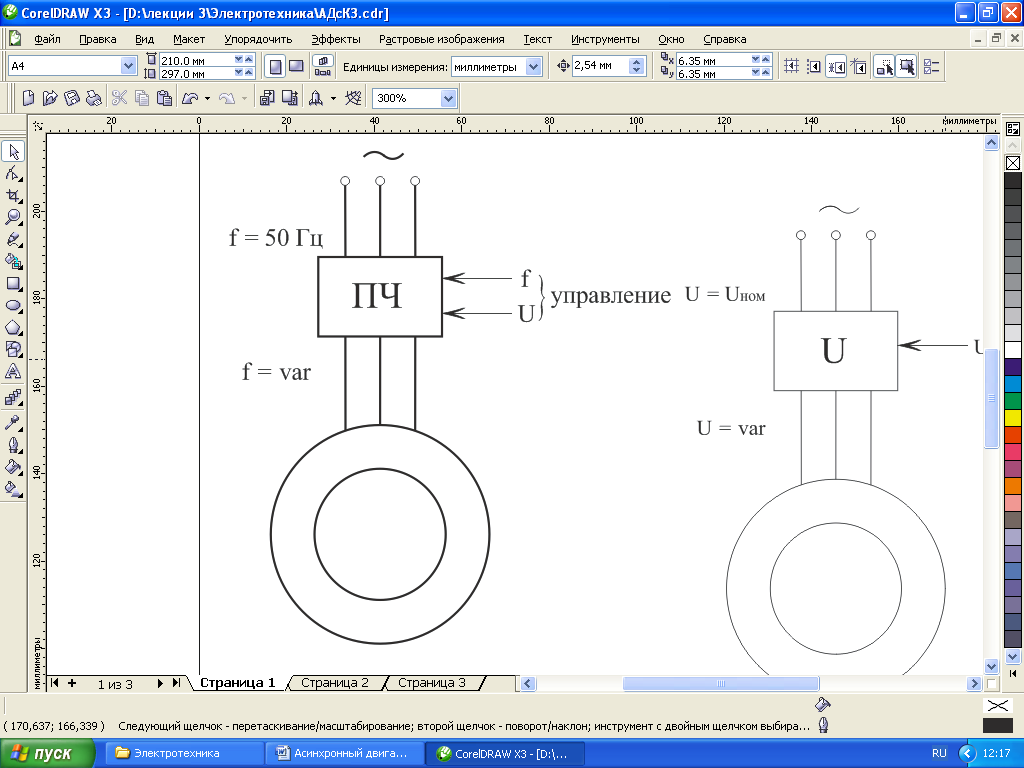
Из теории машин известно, что для обеспечения эффективной работы двигателя при частотном регулировании необходимо с изменением f изменять и подводимое напряжение настолько, чтобы отношение U/f оставалось величиной постоянной. Очевидно, что это условие можно выполнить только при уменьшении f<50 Гц, потому что уменьшение напряжения U<Uном допускается условиями эксплуатации двигателя.
При увеличении f>50 Гц следовало бы пропорционально увеличить и напряжение U>Uном, однако, это не допустимо по условия эксплуатации двигателя. Это обстоятельство отразится на форме механической характеристики.
Отметим, что в любом случае при изменении f изменится и частота вращения магнитного поля (т. е. положение точки n1 на механической характеристике). Таким образом, положение точки n1 может быть ориентиром в изображении искусственных механических характеристик.
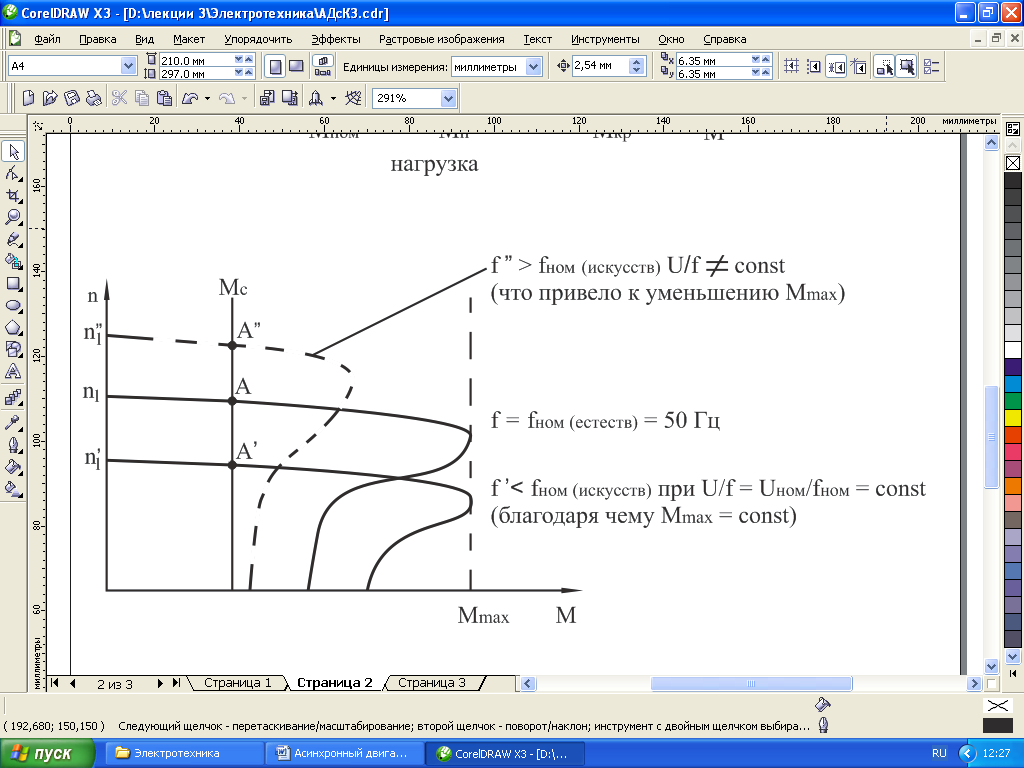
Если привести механическую характеристику механическую характеристику механизма (пусть Мс=const, где Мс — момент сопротивления), то можно оценить диапазон регулирования скорости при частотном регулировании, где А, А', А" — рабочие точки, полученные при условии Мдв=Мс.
Достоинства частотного способа регулирования скорости АД: плавность регулирования: плавно изменяя f, получаем большое количество искусственных характеристик, а, следовательно, и скоростей; большой диапазон с регулировкой как вверх так и вниз от номинальной (двухзонное регулирование).
Недостатки: необходимость установки частотного преобразователя, что значительно увеличивает стоимость электропривода.
ПОЛЮСНОЕ
РЕГУЛИРОВАНИЕ предусматривает
возможность изменения числа пар полюсов
Pп.
Такой способ возможен только у
специальных — многоскоростных,
асинхронных двигателей и достигается
за счет переключения отдельных секций,
из которых состоит катушка (обмотка)
статора с последовательного соединения
на параллельное или наоборот, причем
число пар полюсов при последовательном
соединении больше в 2 раза, чем при
параллельном, т. е. Pп
посл.=2Pп
парал.,
а, следовательно,
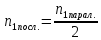 .
.
Очевидно, что положение точки n1 на механической характеристике изменится в 2 раза.
Достоинства полюсного регулирования: простота реализации, отсутствие специальных преобразующих устройств в цепи питания двигателя.
Недостатки: ступенчатость при регулировании, небольшой диапазон регулирования.
РЕГУЛИРОВАНИЕ СКОРОСТИ ИЗМЕНЕНИЕМ ВЕЛИЧИНЫ ПИТАЮЩЕГО НАПРЯЖЕНИЯ U

При
этом способе частота вращения магнитного
поля ( )
остается постоянной, а частота вращения
ротора изменяется за счет скольжения.
Это можно объяснить тем, что с уменьшением
питающего напряжения сильно (квадратичная
зависимость) снижается
М двигателя,
что при прежней нагрузке приводит к
снижению скорости, а, следовательно, и
скольжения. При построении искусственных
механических характеристик исходим из
того, что точка n1,
соответствующая частоте вращения
магнитного поля, не изменится, напряжение
U
можно изменять только в сторону
уменьшения, а, следовательно, моменты
Мп
и
Ммах
уменьшатся, т. к. М~U2.
)
остается постоянной, а частота вращения
ротора изменяется за счет скольжения.
Это можно объяснить тем, что с уменьшением
питающего напряжения сильно (квадратичная
зависимость) снижается
М двигателя,
что при прежней нагрузке приводит к
снижению скорости, а, следовательно, и
скольжения. При построении искусственных
механических характеристик исходим из
того, что точка n1,
соответствующая частоте вращения
магнитного поля, не изменится, напряжение
U
можно изменять только в сторону
уменьшения, а, следовательно, моменты
Мп
и
Ммах
уменьшатся, т. к. М~U2.

Недостаток: малый диапазон регулирования скорости (оценки скорости при работе в точках А, А', А"). Поэтому данный способ регулирования применяется редко.