

Электротехника Ч1
.pdf161
... |
U |
КВ |
|
|
...

162
импульсную (ЧИМ) и широтно-импульсную (ШИМ) модуляции.
3.Сигналы, непрерывные во времени и квантованные (дискретные) по информативному параметру (уровню) приведены на рис. 11.2, и. Такие сиг-
налы формируются на выходе ЦАП. Информативный параметр этих сигналов может принимать только разрешенные уровни (кванты) 2i.
4.Сигналы, дискретные во времени и по информативному параметру.
Теоретическая модель такого сигнала приведена на рис. 11.2, к.
Если каждому уровню такого сигнала поставить в соответствие кодовую комбинацию, то получим кодово-импульсную модуляцию (КИМ). Такие сигналы формируются на выходе АЦП (рис. 11.2, л).
5.МАТЕМАТИЧЕСКИЕ МОДЕЛИ СИГНАЛОВ
Под математической моделью понимают описание сигнала математическими выражениями (формулами, неравенствами, логическими соотношениями и т.п.). Общей особенностью всех моделей сигналов измерительной информации является априорная неопределенность значений информативных параметров. Подход к построению модели определяется классом сигнала. Рассмотрим подходы к построению моделей для квазидетерминированных и случайных сигналов.
Квазидетерминированными называются сигналы, закон изменения которых во времени известен, но не известен информативный параметр. Для построения модели таких сигналов используются как временные, так и спектральные представления. Например, скачкообразное изменение сигнала u(t) на выходе измерительного преобразователя можно описать функцией
0,t < t1
1(t − t1 ) = 1/ 2,t = t1 . (11.3)
1,t > t1
163
С помощью этой функции сигнал измерительной информации может быть записан в виде
U (t) = a(t) 1(t − t1 ) = KU A(t) 1(t − t1 ) . |
(11.4) |
Для описания гармонических сигналов широко используют тригонометрические функции. Например, сигнал АМ имеет вид
U (t) = Um [1 + m A(t)] cosω0t , |
(11.5) |
где m – коэффициент модуляции. |
|
Для сигналов с АИМ математическая модель имеет вид |
|
∞ |
|
U (t) = ∑Um [1 + m A(t)] [1(t − tк ) − 1(t − tк − τ )], |
(11.6) |
к=1
где τ - длительность импульсов.
Спектральное представление квазидетерминированных сигналов основано на преобразовании Фурье. Поэтому модель периодического сигнала u(t) имеет вид
∞ |
|
u(t) = U0 + ∑Uк соs(k ω t − ϕк ) , |
(11.7) |
к=1
где U0 – постоянная составляющая, Uк; ϕ к - амплитуда и фаза к-ой гармони-
ки, к – номер гармоники.
Для непериодического сигнала спектральное представление основано на применении интеграла Фурье
∞ |
|
S( jω ) = ∫u(t) e− jωt dt . |
(11.8) |
−∞
В общем случае сигналы измерительной информации – случайные процессы. Построение моделей таких сигналов основано на применении характеристик случайных процессов: закона распределения случайной величины, математического ожидания, среднего квадратического отклонения, корреляционной функции или спектральной плотности мощности.
164
КОНТРОЛЬНЫЕ ВОПРОСЫ
11.1.Перечислите основные признаки классификации средств измерений.
11.2.Чем отличаются рабочие средства измерений от эталонов?
11.3.Для чего предназначены аналоговые преобразователи?
11.4.По каким признакам разделяются измерительные преобразователи?
11.5.Приведите способы выражения предела основной допускаемой погрешности.
11.6.Приведите условное обозначение класса точности измерительного прибора, если для его определения использован предел относительной основной допускаемой погрешности.
11.7.Приведите условное обозначение класса точности измерительного прибора, если для его определения использован предел приведенной основной допускаемой погрешности, а нормирующая величина L выражается в единицах измеряемой величины.
11.8.Перечислите основные метрологические характеристики средств измерений.
11.9.В чем отличие постоянной средства измерения С от цены деления его шка-
лы?
11.10.Влияет ли полное входное сопротивление Zвх средства измерений на значение погрешности измерений? Если влияет то почему?
11.11.Назовите основные классы сигналов измерительной информации.
11.12.Какой класс сигналов измерительной информации может быть использован
вцифровых измерительных приборах?
11.13.Приведите определение математической модели сигналов измерительной
информации.
11.14.Какой математической функцией описывают идеальный скачек сигнала измерительной информации?
11.15.Какие математические функции удобно применять для составления модели гармонических сигналов?
11.16.Применение каких характеристик может быть положено в основу построения модели случайных сигналов?
165
ЛЕКЦИЯ 12 СВОЙСТВА СТЕДСТВ ИЗМЕРЕНИЙ
В РАЗЛИЧНЫХ РЕЖИМАХ РАБОТЫ
Процесс измерения любой физической величины любым измерительным прибором требует некоторых временных затрат. Минимально допустимое время измерения определяется постоянной прибора, т. е. его инерционными свойствами.
Сдругой стороны, измеряемая величина может изменяться во времени
сразличной скоростью. Соотношение между скоростью изменения измеряемой величины и постоянной измерительного прибора определяет режим его работы. Различают два режима работы: статический и динамический.
Режим работы измерительного прибора называется статическим, если измеряемую величину (параметр) на интервале измерения можно считать постоянной. Когда измеряемый параметр изменяется в процессе измерения, измерительный прибор переходит в динамический режим. В последнем случае для определения результата измерения необходимо учитывать динамические свойства прибора. Погрешности измерений увеличиваются.
Таким оборазом, свойства средств измерений, прежде всего точность, во многом зависят от режимов работы. В лекции рассматриваются погрешности средств в различных режимах.
1.СТРУКТУРНЫЕ СХЕМЫ И СВОЙСТВА СРЕДСТВ ИЗМЕРЕНИЙ В СТАТИЧЕСКОМ РЕЖИМЕ
Для упрощения анализа свойств средств измерений, вводятся понятия:
звено и структурная схема. Определим эти понятия.
В средствах измерений сигнал претерпевает сложное функциональное

166
преобразование, которое всегда можно разложить на ряд элементарных. Можно считать, что каждое элементарное преобразование происходит в отдельном функциональном узле. Функциональный узел, осуществляющий элементарное преобразование измеряемого сигнала, получил название «звено». Соединение звеньев в цепь преобразований называется структурной схемой.
В зависимости от соединения звеньев различают два вида структур-
ных схем: прямого преобразования (действия) и уравновешивающего (ком-
пенсационного).
1.1. Средства измерений прямого преобразования.
Структурная схема этих средств приведена на рисунке 12.1.
x |
|
x 1 |
|
x 2 |
... xn-1 |
|
x n |
П |
1 |
П |
П |
||||
х0 |
|
|
2 |
|
|
n |
|
|
x01 |
|
x02 |
|
|
x0n |
|
|
|
|
|
|
|||
Рис. 12.1. Структурная схема средств прямого преобразования |
|||||||
В приведенной схеме индексами П1, П2 ,..., Пn |
обозначены звенья; ин- |
||||||
дексами х1, х2 ,..., хn |
|
- информативные параметры сигналов измерительной |
|||||
информации. Для краткости будем называть их сигналами.
Схему прямого преобразования имеют электромеханические приборы, например, амперметр. Для амперметра входным сигналом х является измеряемый ток I. Посредством шунта (звено П1) ток I преобразуется в малый ток I1, соответствующий на схеме сигналу х1. Следующее звено схемы – П2 представляет узлы измерительного механизма, преобразующие электрическую величину I1 в значение вращающего момента М, т. е. в сигнал х2. Звено П3 преобразует вращающий момент в угол поворота указателя α, что соот-

167
ветствует сигналу х3.
Чувствительность прибора по рис. 12.1 определим выражением
|
|
S = |
dxn |
|
= |
dx1 |
|
dx2 |
... |
dxn |
= K K |
|
...K |
n |
, |
(12.1) |
|
|
|
|
|
|
2 |
||||||||||
|
|
|
dx |
|
dx |
dx1 |
1 |
|
|
|
||||||
|
|
|
|
dxn −1 |
|
|
|
|
|
|||||||
где Ki = |
dxi |
– коэффициент преобразования i-го звена. |
|
|||||||||||||
|
|
dxi−1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
Под действием внешних факторов коэффициенты K1, K2 ,...Kn могут |
||||||||||||||||
меняться на величину |
|
K1, |
K2 ,... |
Kn . Изменение коэффициентов преобра- |
||||||||||||
зования означает изменение чувствительности. Если эти изменения коэффициентов Кi достаточно малы, то членами второго и большего порядка малости можно пренебречь. Тогда относительное изменение чувствительности можно определить выражением
|
S |
= |
K1 |
+ |
K2 |
+ ... + |
Kn |
. |
(12.2) |
|
|
|
|
|
|||||
|
S |
|
K1 |
K2 |
Kn |
|
|||
Изменение чувствительности приводит к изменению выходного сиг- |
|||||||||
нала на величину |
|
|
|
|
|
|
|
|
|
|
x |
= (S + S )x − S x = Sx . |
|
||||||
|
|
n |
|
|
|
|
|
|
|
Это означает, что значение входной величины х, определяемое по значению выходной хn, будет измерено с погрешностью. Абсолютная величина погрешности измерения – 2х определяется отношением:
x = |
xn |
= |
S x |
. |
(12.3) |
S |
|
||||
|
|
S |
|
||
Очевидно, что погрешность (12.3), вызванная изменением чувствительности, является мультипликативной.
Аддитивная погрешность средств по схеме рис. 12.1 вызывается дрейфом нуля звеньев, а также наложением помех на полезный сигнал. Эти воздействия приводят к смещению графика характеристики преобразования i-
|
|
|
|
|
|
|
|
|
|
|
|
|
168 |
|
|
|
|
|
го звена (см. рис. 12.2) на величину |
|
x |
. Чтобы найти аддитивную погреш- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0i |
|
|
|
|
ность, |
в |
схему |
рис. |
12.1 |
вводят |
|
дополнительные, |
внешние |
сигналы – |
|||||||||
x |
, |
x |
,..., |
x |
. |
Результирующее действие этих сигналов равно действию |
||||||||||||
|
01 |
02 |
|
|
on |
|
|
|
|
|
|
|
|
|
|
|
|
|
одного дополнительного сигнала |
x |
0 |
на входе схемы, причем |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
= |
x01 |
+ |
|
x02 |
|
+...+ |
xon |
. |
|
(12.4) |
|
|
|
|
|
|
|
0 |
|
K1 |
|
K1 |
K2 |
|
|
(K1 K2...Kn ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
хi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
oi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х i-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xoi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
ис. 12.2. График характеристики |
|
|
|||||||||
|
|
|
|
|
|
|
преобразования i - го звена |
|
|
|
||||||||
Значение x |
определяет результирующую аддитивную погрешность. |
|
0 |
Таким образом, в средствах измерений, имеющих структурную схему прямого преобразования, происходит суммирование погрешностей всех звеньев. Это затрудняет изготовление средств прямого преобразования с высокой точностью.
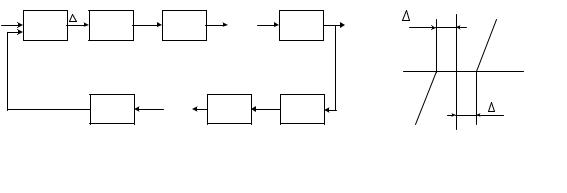
1.2 Средства измерений уравновешивающего
преобразования.
Структурная схема средства уравновешивающего преобразования приведена на рис. 12.3. На этом рисунке ПОС1,2…,m – звенья цепи обратной связи (ЦОС) с коэффициентами преобразования β1 , β 2 ,..., β m . Поэтому
хm = хп β1 β 2 ... β m = хп β . |
(12.5) |
На входе цепи прямого преобразования, в сравнивающем узле (СУ),
169
происходит сравнение (компенсация) входного сигнала х и сигнала ЦОС – хm. На выходе СУ получаем разностный сигнал
х = х − хm .
Средства измерений уравновешивающего преобразования могут работать как с полной компенсацией, так и с неполной.
При полной компенсации в установившемся режиме
х = х − хm = 0 . |
(12.6) |
Это возможно в тех устройствах, у которых в цепи прямого преобразования есть интегрирующее звено с характеристикой
t
xi = ∫ F( xi −1 )dt .
0
Такую характеристику имеет следящий двигатель. Угол поворота вала такого двигателя пропорционален напряжению и времени. Тогда, учитывая (12.5) и (12.6), можно записать
х = х − хm = х − хп β = 0 ,
а
хп = |
x |
. |
(12.7) |
|
|||
|
β |
|
|
Выражение (12.7) показывает, что сигнал на выходе средства измерения хn пропорционален входному и не зависит от коэффициентов цепи прямого преобразования.
Поэтому чувствительность средства определится выражением:
S = |
dxn |
= |
1 |
. |
(12.8) |
∂x |
|
||||
|
|
β |
|
||
Мультипликативная относительная погрешность, обусловленная нестабильностью коэффициентов преобразования звеньев, равна отношению отрицательного приращения 2β к значению β:
170
δ m = |
S |
= − |
β |
(12.9) |
|
S |
β |
||||
|
|
|
и имеет только отрицательный знак.
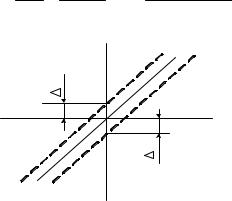
Аддитивная погрешность схемы рис. 12.3 обуславливается порогом чувствительности звеньев (наименьшим изменением входного сигнала, которое способно вызвать появление сигнала на выходе). Характеристика преобразования такого звена приведена на рис. 12.4.
При наличии порога чувствительности состояние компенсации наступает, когда
|
|
|
|
|
|
x − x m |
= |
x ч , |
|
|
|||
причем |
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
ч |
= |
x |
ч1 |
+ |
xч2 |
+ |
|
xч3 |
+ ... + |
xчi |
. |
|
K1 |
K1 |
K2 |
K1 K2 ...Ki −1 |
||||||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
Таким образом, изменение входного сигнала в пределах ± xч не вы-
зывает изменений выходного сигнала, т.е. появляется абсолютная аддитивная погрешность.
При неполной компенсации выходной сигнал |
|
xn = K x . |
(12.10) |
В этом случае установившийся режим наступает при некоторой разно-
сти