

Лекция 7. Этап функционально- логического проектирования
• (продолж.)
Математические модели компонентов:
–ММЭ:
•таблица истинности и состояний (удобны, но только для простых элементов)
•конечный автомат (наиболее распространен).
Автомат Мура:
Y = φ (X, A);
A‘ = ψ (X, A),
где Y - вектор выходных для элемента переменных; Х - вектор входных переменных; А – вектор,
характеризующий внутренние состояния. Элементы Х и A относятся к моменту времени t, а элементы векторов
A‘ и Y – к моменту времени t+tз, где tз – задержка.
Основы автоматизации |
|
проектирования |
61 |
Лекция 7. Этап функционально- логического проектирования (продолж.)
•Математические модели компонентов:
Примеры: |
в |
|
|
а |
|
& |
|
||||
• Двухвходовый И-НЕ |
|
|
|
||
|
|
|
|
|
|
а = в ^ с |
с |
|
|
|
|
|
|
|
|||
Или Y(t) = X1(t) ^ X2(t) или Y(t+tз) = X1(t) ^ X2(t)
•Т-триггер
А(t + tз) = Х (t) ^ A (t) v X (t) ^ A (t).
Основы автоматизации |
|
проектирования |
62 |
Лекция 7. Этап функционально- логического проектирования (продолж.)
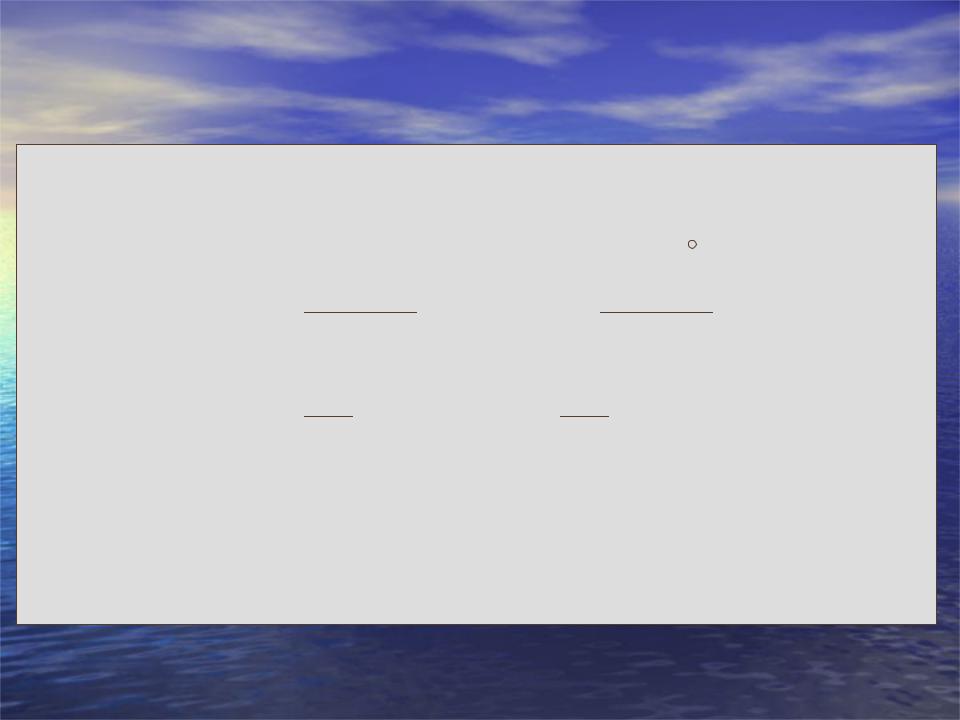
•Математическая модель схемы:
–ММС – это совокупность ММЭ, в которых производится
отождествление переменных, относящихся к
соединенным выводам элементов.
Пример: |
a |
& |
e |
& |
f |
|
|
|
|
|
|
e = a ^ с |
b |
|
|
|
|
f = e ^ c
c
Обозначим: U – вектор входных для схемы шин, U = (a, b, c) V – вектор промежуточных и выходных шин, V =
(e, f)
V = F (V, U); V ' = F (V, U).
Основы автоматизации |
|
проектирования |
63 |
Лекция 7. Этап функционально- логического проектирования (продолж.)
•Синхронная и асинхронная модель:
–V = F (V, U) – уравнение синхронной модели
–V ' = F (V, U) – уравнение асинхронной модели.
Синхронная модель:
-наиболее экономична, не учитывает задержек (отсутствует время), система логических уравнений
-применяют:
-Проверка корректности соединений
-Выявление рисков сбоя (возможность появления ложных сигналов)
-Синтез тестов
Используют булевы (двузначные) и многозначные переменные.
Основы автоматизации |
|
проектирования |
64 |
Лекция 7. Этап функционально- логического проектирования (продолж.)
• Статический риск сбоя: |
|
|
||
– |
Это возможность изменения переменной на |
|||
|
выходе какого-либо элемента в условиях, когда |
|||
|
при правильном функционировании такого не |
|||
|
должно быть. |
а |
& |
|
– |
b |
с |
||
Пример: |
а) |
|||
|
||||
|
При одновременном |
а |
||
|
|
|||
|
переключении сигнала |
0 |
|
|
|
b |
t |
||
|
по шинам а и в, то |
0 |
t |
|
|
изменений по шине с |
c |
||
|
|
|||
|
не будет. |
0 |
t |
|
|
|
|||
|
|
|
||
|
|
|
Tc |
|
|
|
|
б) |
|
Основы автоматизации |
|
проектирования |
65 |
Лекция 7. Этап функционально- логического проектирования (продолж.)
•Статический риск сбоя (продолж.):
–Необходимо дополнительное состояние – 2
(неопределенное состояние при переходе 1 в 0, или 0 в
а 1). 0 |
1 |
2 |
0 |
1 |
2 |
0 |
1 |
2 |
|
в |
0 |
0 |
0 |
1 |
1 |
1 |
2 |
2 |
2 |
И |
0 |
0 |
0 |
0 |
1 |
2 |
0 |
2 |
2 |
ИЛИ |
0 |
1 |
2 |
1 |
1 |
1 |
2 |
1 |
2 |
НЕ |
1 |
0 |
2 |
|
|
|
|
|
|
Основы автоматизации |
|
проектирования |
66 |
Лекция 7. Этап функционально- логического проектирования (продолж.)
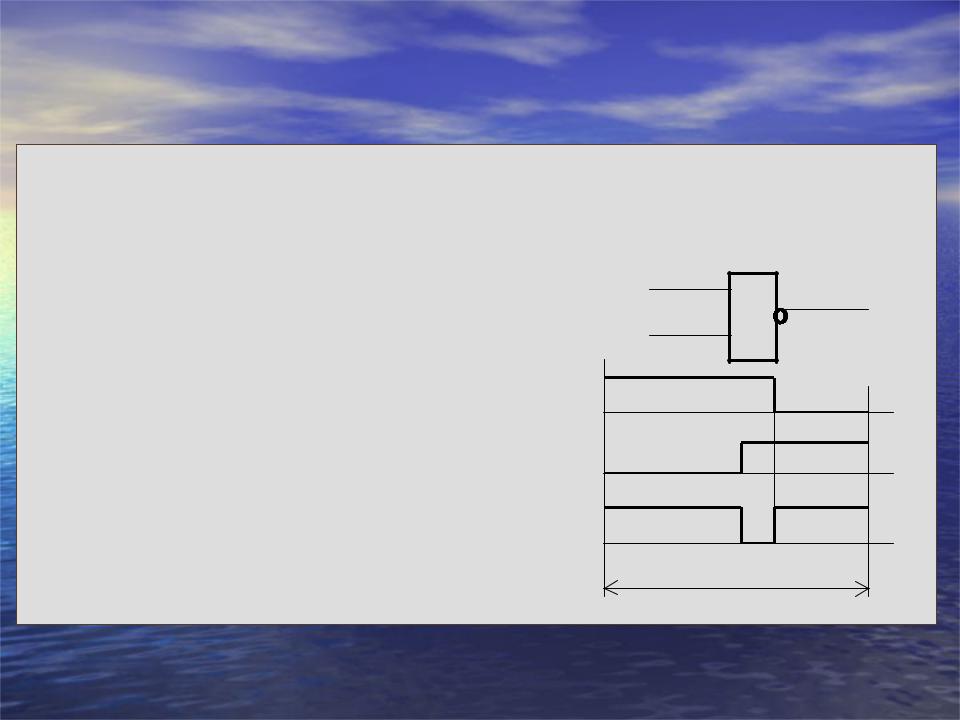
•Статический риск сбоя (продолж.):
–При моделировании необходимы 2 расчета (анализа), сначала – промежуточные значения, а затем окончательные.
–Промежуточное значение для входной переменной задается равным 2 тогда,aкогда исходное& и окончательное значения неодинаковыe.
– |
Пример: |
b |
|
|
|
||
|
|
|
1 |
|
e = a ^ b, |
c |
g |
|
|
g = e v c.
Основы автоматизации |
|
проектирования |
67 |

Лекция 7. Этап функционально- логического проектирования (продолж.)
•Статический риск сбоя (продолж.):
–Расчет в таблице:
Значения |
a |
b |
c |
e |
g |
переменных |
|
|
|
|
|
Исходные |
1 |
0 |
1 |
0 |
0 |
Промежуточные |
1 |
2 |
0 |
2 |
2 |
Окончательные |
1 |
1 |
2 |
1 |
0 |
- Значение сигнала 2 по шине g (должно быть 0), говорит о
риске сбоя (появление ложного сигнала).
Основы автоматизации |
|
проектирования |
68 |
Лекция 7. Этап функционально- логического проектирования (продолж.)
•Динамический риск сбоя:
–Это опасность многократныхa 
|
0 |
|
|
|
|
|
изменений выходной переменной |
|
|
|
|||
|
b |
|
|
|
||
вместо правильного однократного |
|
|
|
|
|
|
|
|
|
|
|
||
изменения. |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
- Если использовать |
c |
|
|
|
|
|
трехзначную логику, то |
0 |
|
|
|
|
|
e |
|
|
|
|||
динамический риск не будет |
|
|
|
|||
|
|
|
|
|
|
|
выявлен, необходима |
0 |
|
|
|
|
|
|
|
|
|
|
||
пятизначная логика. |
g |
|
|
|
||
3 – переход из 1 в 0, |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
4 – переход из 0 в 1. |
|
|
|
|
|
|
Основы автоматизации |
|
проектирования |
69 |

Лекция 7. Этап функционально- логического проектирования (продолж.)
•Динамический риск сбоя (продолж.):
–Для ранее приведенного примера
Значения |
a |
b |
c |
e |
g |
переменных |
|
|
|
|
|
Исходные |
1 |
0 |
1 |
0 |
0 |
Промежуточные |
3 |
4 |
3 |
2 |
2 |
Окончательные |
0 |
1 |
0 |
0 |
1 |
–Динамический риск сбоя по шине g (значение 2, д.б. 4)
–Статический риск сбоя по шине e.
Основы автоматизации |
|
проектирования |
70 |