

Лекция 11. Базовые алгоритмы АСхП (продолж.)
•Анализ статического режима
- В этом случае для нахождения нового значения вектора Vk+1, необходимо решать СЛАУ вида
J(Vk) * Vk+1 = Ikэкв ,
где J – Якобиан – соответствует матрице узловых проводимостей схемы Y в режиме по постоянному току (т.е. только активные сопротивления, емкостные элементы будут в режиме холостого хода, а индуктивные - короткого замыкания) с добавлением нелинейных элементов, замененных их производными при предыдущем значении
Vk.
Вектор Ikэкв будет содержать составляющие постоянных источников схемы (источники питания, смещения и др.) и
эквивалентных источников тока Ikэкв нелинейных элементов.
Основы автоматизации |
|
проектирования |
161 |
Лекция 11. Базовые алгоритмы АСхП (продолж.)
•Анализ статического режима
- Итерационный процесс решения СНАУ заканчивается при выполнении условия
| Vk+1 - Vk | ≤ Ɛ ,
где Ɛ - заданная погрешность расчета.
- По найденным в результате расчетов токам и напряжениям в режиме постоянного тока в программах моделирования вычисляются различные мощности, как потребляемые, так и рассеиваемые в элементах, напряжения и токи на переходах активных приборов (рабочие точки).
Основы автоматизации |
|
проектирования |
162 |

Лекция 11. Базовые алгоритмы
• АСхП (продолж.)
Анализ переходного режима
-Анализ в переходном режиме (анализ в динамическом режиме, анализ во временной области, transient or time domain analysis) предназначен для получения формы отклика на выходе схемы при заданном воздействии на входе (работа осциллографа).
-Модель схемы в виде СНДУ
F (V/, V, t) = 0
решается методами численного интегрирования с определением V(t), при заданных начальных условиях Vo = V(to).
- Искомая функция V(t) определяются в отдельных точках интервала t1, t2, ...., tk в виде значений V1,
V2, ..., Vk, приближенно равных значениям V(t1), V(t2), ..., V(tk) точного решения V(t).
Основы автоматизации |
|
проектирования |
163 |

Лекция 11. Базовые алгоритмы АСхП (продолж.)
•Анализ переходного режима
- Расстояние Δt = tk+1 - tk = h - называется шагом интегрирования и может быть задано перед началом
вычислений (интегрирование с постоянным шагом) либо определено в процессе вычислений в зависимости от
погрешности расчетов (с автоматическим выбором
шага).
- Начальное условие Vo может быть задано в исходных данных или вычислено с использованием анализа
статического режима при учете постоянных
составляющих источников воздействий и питания.
Основы автоматизации |
|
проектирования |
164 |

Лекция 11. Базовые алгоритмы АСхП (продолж.)
•Анализ переходного режима
- Решение СНДУ вида F (V/, V, t) = 0 или уравнения
V/ = f (V, t),
где V/ = dV/dt методами численного интегрирования можно рассмотреть на примере простейших методов
первого порядка, называемых явными и неявными
методами Эйлера.
- Для двух соседних точек справедливо соотношение
Vk 1 Vk ttkk 1 f (V ,t)dt.
Основы автоматизации |
|
проектирования |
165 |
Лекция 11. Базовые алгоритмы АСхП (продолж.)
•Анализ переходного режима
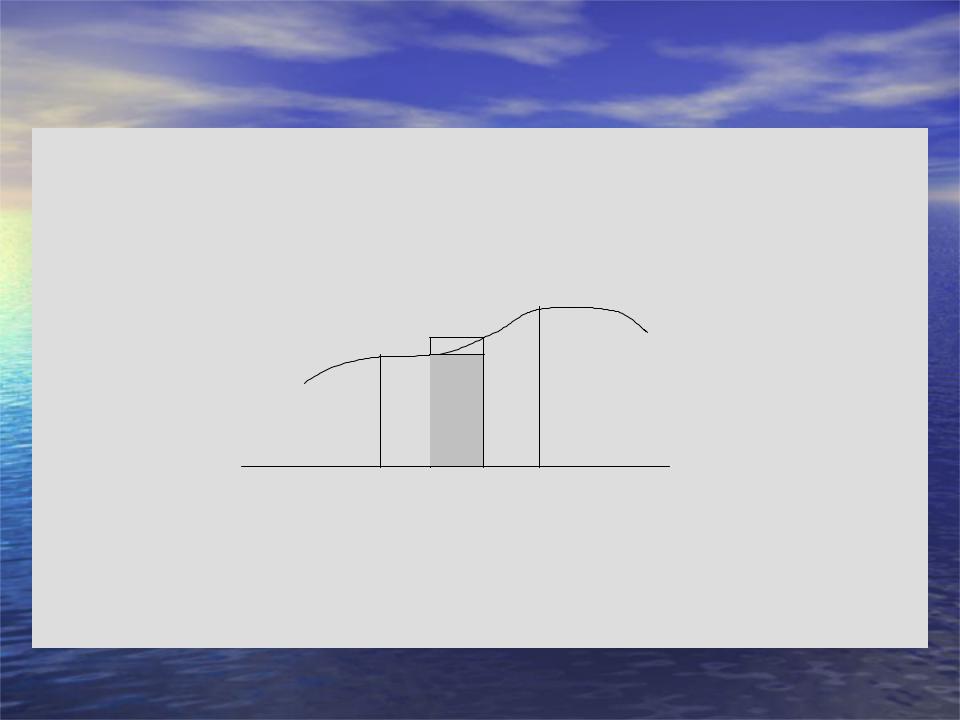
- Решение интеграла численным методом сводится к вычислению площади подынтегральной кривой. В
методе Эйлера (формула прямоугольника) для решения
применяется одно из следующих двух
аппроксимирующих выражений:
Vk 1 Vk h f (Vk ,tk );
Vk 1 Vk h f (Vk 1,tk 1 );
- Эти формулы приводят к виду, соответствующему
явному и неявному методам Эйлера.
Основы автоматизации |
|
проектирования |
166 |
Лекция 11. Базовые алгоритмы АСхП (продолж.)
•Анализ переходного режима
- Площадь прямоугольника может быть вычислена двумя
способами, различающимися только тем, какое значение функции выбрано в качестве высоты прямоугольника.
f(Vk) |
f(Vk+1) |
|
|
tk |
tk+1 |
- На первый взгляд явнаяРис. 2.формула7. имеет значительные преимущества, так как новое значение функции вычисляется по известным значениям (явно) Vk, h и f(Vk) по
простой формуле.
Основы автоматизации |
|
проектирования |
167 |
Лекция 11. Базовые алгоритмы АСхП (продолж.)
•Анализ переходного режима
- В неявном методе новое значение находится и в левой и правой частях уравнения Vk+1, т.е.
связано неявно.
-Для нахождения Vk+1 необходимо применять какой-либо итерационный метод, что увеличивает вычислительные затраты.
-Поэтому многие годы в программах моделирования использовались явные методы
численного интегрирования.
Основы автоматизации |
|
проектирования |
168 |
Лекция 11. Базовые алгоритмы АСхП (продолж.)
•Анализ переходного режима
- Явные методы имеют сильные ограничения:
1.В современных высокоскоростных электронных схемах имеется сильный разброс постоянных времени, что приводит к так называемым "жестким" дифференциальным уравнениям, когда для обеспечения достаточной точности вычислений шаг
интегрирования приходится выбирать сверх малым, что значительно увеличивает вычислительные затраты и сводят преимущества явных методов на нет.
2.В явных методах имеет место накопления ошибки от шага к шагу и численная неустойчивость. Для уменьшения ошибки применяют формулы интегрирования очень высоких порядков, что приводит
дополнительно к увеличению вычислительных затрат.
Основы автоматизации |
|
проектирования |
169 |
Лекция 11. Базовые алгоритмы АСхП (продолж.)
•Анализ переходного режима
-В неявных методах погрешность нового значения не зависит (пренебрежем некоторой строгостью) от предыдущих значений и определяется только точностью итерационного метода.
-Поэтому в современных программах АСхП используют в основном неявные методы, которые обеспечивают сокращение вычислительных затрат, более точны и устойчивы.
Основы автоматизации |
|
проектирования |
170 |