

2. Принцип действия и методические погрешности акселерометров.
Датчиками первичной инерциальной информации являются измерители ускорений - акселерометры, основанные законах классической механики Ньютона.
Простейший осевой акселерометр (рис. 15.5) состоит из инерционной массы m, с помощью пружины прикрепленной к основанию. При движении основания в направлении оси X, называемой осью чувствительности акселерометра, с ускорением ак к массе m будет приложена сила инерции F = m • ак, в результате чего масса станет перемещаться относительно шкалы в направлении, противоположном вектору ускорения. Со стороны пружины на массу будет действовать обратная по знаку силе F сила
Fпр = Кпр * ΔX,


Рис.15.6. Маятниковый акселерометр с электрической пружиной
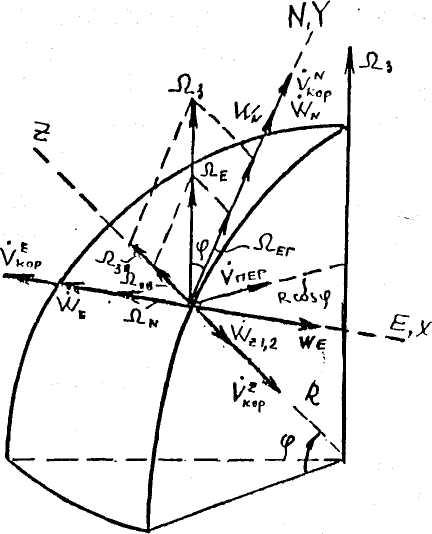
Рис. 15.7.К определению методических погрешностей акселерометра
где КПр - коэффициент жесткости пружины;
ΔХ - линейная величина перемещения массы.
По окончании переходного процесса сила Fпр уравновесит силу F, при этом величина ΔХ оказывается пропорциональной измеряемому ускорению:

С помощью потенциометра значение ΔХ может быть преобразовано в электрический сигнал, пропорциональный ак.
Акселерометры измеряют только ускорения, обусловленные действием негравитационных сил, и не измеряют ускорений, вызванных гравитацией. Действительно, если основание, на котором установлен акселерометр, движется к земле с ускорением силы тяжести g (полагаем, что ак = 0), то, поскольку сила тяжести одинаково действует и на основание, и на массу m акселерометра, перемещения массы относительно нулевой отметки шкалы не будет.
Если ак - ускорение, создаваемое разностью сил тяги и лобового сопротивления, то полное абсолютное ускорение основания будет, а = ак - (-g). Знак " - " перед g учитывает отрицательное направление вектора g по оси X. Акселерометр же измерит только ускорение ак, то есть будет иметь место методическая погрешность в измерении полного абсолютного ускорения, равная ускорению силы тяжести. Поэтому в общем случае использование инерциальных систем возможно только в известном поле гравитации. Ускорение ак, измеряемое акселерометром, часто называют "кажущимся", при этом:
ак = а - g.
В случае горизонтального полета (на постоянной высоте) подъемная сила ЛА уравновешивает силу тяжести. За счет подъемной силы Y в вертикальном направлении создается ускорение аку. В горизонтальном полете вертикальной составляющей ускорения нет, поэтому, а = аку + g = 0, откуда аку = -g, т.е. в этом случае акселерометр с вертикальной осью чувствительности будет измерять ускорение, создаваемое подъемной силой, численно равное, но противоположное по знаку ускорению силы тяжести. Именно в этом смысле следует понимать встречающееся утверждение, что "акселерометр реагирует на ускорение силы тяжести".
Кроме осевых акселерометров в инерциальных системах применяются маятниковые акселерометры, причем у тех и у других для повышения точности работы и диапазона измерений, ограниченных гистерезисом пружины, вместо механической пружины используется электрическая пружина.
Маятниковый
акселерометр с электрической пружиной
(рис. 15.6) работает следующим образом.
При движении ЛА в направлении оси X
чувствительности прибора с ускорением
ак
к массе маятника m,
укрепленной на плече 1, будет приложена
сила инерции F,
создающая относительно оси Z
момент силы инерции М = m![]() l
l![]() ак,
в результате чего маятник станет
поворачиваться вокруг оси Z.
Угол
ак,
в результате чего маятник станет
поворачиваться вокруг оси Z.
Угол
![]() поворота маятника с помощью датчика
угла ДУ (потенциометрического,
индукционного или другого типа)
преобразуется в напряжениеUβ
= Кду
* β
( Кду
- крутизна характеристики датчика угла),
которое после усиления в усилителе до
величины Uy
= Ky*
Uβ>
(Ky
- коэффициент усиления усилителя)
подается на датчик момента ДМ. Последний
прикладывает к оси Z
подвеса маятника момент обратной
связи
поворота маятника с помощью датчика
угла ДУ (потенциометрического,
индукционного или другого типа)
преобразуется в напряжениеUβ
= Кду
* β
( Кду
- крутизна характеристики датчика угла),
которое после усиления в усилителе до
величины Uy
= Ky*
Uβ>
(Ky
- коэффициент усиления усилителя)
подается на датчик момента ДМ. Последний
прикладывает к оси Z
подвеса маятника момент обратной
связи
![]()
Кэп = Кду * Ку * Кдм - коэффициент передачи электрической пружины, таким образом, элементами электрической пружины являются датчик угла, усилитель и датчик момента.
В установившемся режиме момент обратной связи уравновесит момент ил инерции, так что угол поворота маятника и напряжение на выходе усилителя оказываются пропорциональны ускорению:
 и
и
При повороте маятника вместе с ним на угол в повернется и ось чувствительности. При этом акселерометр будет измерять не все ускорение ак, а его составляющую аК, = aK cos β.
Кроме того,
акселерометр станет реагировать и на
поперечные ускорения, направленные
вдоль оси Y.
Это обстоятельство приводит к
методической погрешности, уменьшение
которой возможно за счет уменьшения
угла
![]() ,
что достигается увеличением коэффициента
усиления усилителя.
,
что достигается увеличением коэффициента
усиления усилителя.
Рассмотренные акселерометры имеют отрицательную обратную связь, обусловленную наличием пружины (механической или электрической). Поэтому такие приборы называют компенсационными.
Ввиду того, что опору с меньшим трением легче изготовить в случае вращательного движения массы m, чем в случае ее поступательного движения, то в инерциальных системах навигации наибольшее применение нашли маятниковые акселерометры.
Пороговая чувствительность современных акселерометров с электрической пружиной составляет порядка 10-4 - 10-5 g.
Акселерометры имеют также методические погрешности, обусловленные собственным вращением Земли и перемещением ЛА относительно Земли. Эти погрешности удобно анализировать по уравнениям акселерометров в 1-й или 2-й форме.
Первая форма связывает измеряемые ускорения с абсолютными линейными скоростями ЛА, абсолютными угловыми скоростями вращения ГСП в инерциальной системе отсчета и составляющими удельной гравитационной
силы
![]()
Вторая форма измеряемые ускорения связывает с составляющими путевой скорости, относительными угловыми скоростями вращения ГСП и составляющими удельной силы тяжести gT.
Более просто выводятся и выглядят уравнения акселерометров в первой форме. Выше было показано, что акселерометр измеряет не абсолютное, а кажущееся ускорение:
![]()
![]()
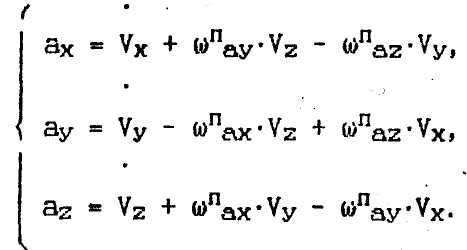
Определим вначале значение абсолютного ускорения. В соответствии с теоремой о производной от вектора во вращающейся системе координат:

где:

![]()
![]()
![]()
Далее разложим
![]() по осям с учетом правила для произведения
двух векторов:
по осям с учетом правила для произведения
двух векторов:
Теперь, помня,
что для инерциальной системы координат![]() (
(![]() -
вектор удельной гравитационной силы),
определим окончательно составляющие
абсолютной скорости, значения которых
и есть уравнения
акселерометра в 1-й форме:
-
вектор удельной гравитационной силы),
определим окончательно составляющие
абсолютной скорости, значения которых
и есть уравнения
акселерометра в 1-й форме:


где Vx(to), Vy(to), Vz(to) - начальные значения абсолютной скорости;
gox, goy, goz - составляющие вектора удельной гравитационной силы;
aKX, aKy, аКz - сигналы акселерометров. Из уравнений видно, что для определения скорости (а в последующем и линейных координат) интегрирования одних только сигналов акселерометров недостаточно, необходимо учитывать остальные члены в подынтегральном выражении. Эти члены носят название компенсационных, и неучет их приводит к появлению основных методических погрешностей акселерометров. Компенсационные члены имеют первый или второй порядок малости и не учитываются только в ИКВ-системах. Такое упрощение объясняется следующими рассуждениями:
1)![]() м/с2
- второй порядок малости;
м/с2
- второй порядок малости;
среднее значение вертикальной скорости Vz за весь полет близко к нулю и в любой момент времени обычно меньше Vx и Vy, - следовательно, членами о Vz также можно пренебречь;
при компенсации кажущегося ухода ГСП в азимуте даже только из-за суточного вращения Земли (по закону
 ),члены
с
),члены
с для
максимальных значений скоростей не
превышают 3,5 • 10-2
м/с2;
если же компенсируется и уход ГСП из-за
движения ЛА, то члены с wпaz
имеют еще меньший порядок малости;
для
максимальных значений скоростей не
превышают 3,5 • 10-2
м/с2;
если же компенсируется и уход ГСП из-за
движения ЛА, то члены с wпaz
имеют еще меньший порядок малости;
4) Vz и в особенности вертикальная координата z в ИКВ-системах не вычисляются вследствие вычислительной неустойчивости вертикального канала; в остальных ИНС также из-за вычислительной неустойчивости канала вычисляется только значение Vz.
Полные уравнения акселерометров во 2-й форме имеют вид:
Таким образом, для ИКВ-систем алгоритм вычисления скоростей выглядит так:


где: W - путевые скорости;
![]() - угловые
скорости вращения ГСП относительно
Земли;
- угловые
скорости вращения ГСП относительно
Земли;
![]() - угловые
скорости вращения Земли;
- угловые
скорости вращения Земли;
![]() - составляющие
удельной силы тяжести.
- составляющие
удельной силы тяжести.
В ИНС используется как 1-я, так и 2-я Формы уравнений.
Основой любой ИНС является ИКВ. Все ИКВ - это фактически ГСП, удерживаемые в заданном положении специальными гиростабилизаторами.