

ТМ-Статика (V-01-01-13)
.pdfТЕОРЕТИЧЕСКАЯ МЕХАНИКА |
СТАТИКА |
Версия 01.01.13 |
Ковалев Л.А. |
____________________________________________________________________
Пример 2.2. Однородный стержень закреплен шарнирно в точке А и опирается на гладкий цилиндр (рис. 2.13). Определить линию действия реакции RA (реакции связи в точке А).
Рис. 2.13
Следовательно, сила
Решение: Так как стержень однородный, то равнодействующая сил тяжести (сила P), действующих на стержень, приложена в его геометрическом центре (точка С). Так как стержень опирается на гладкую поверхность, то реакция связи (сила N ) в точке касания (точка D) направлена по нормали к этой поверхности. На тело действуют три силы,
направления двух сил (N и P) известно. Согласно теореме о трех силах линии действия всех трех сил пресекаются в одной точке.
RA направлена вдоль линии AЕ.
11
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА |
СТАТИКА |
Версия 01.01.13 |
Ковалев Л.А. |
____________________________________________________________________
Лекция 3
Краткое содержание: Система сходящихся сил. Условие равновесия системы сходящихся сил. Примеры. Момент силы относительно точки. Момент силы относительно оси.
Система сходящихся сил
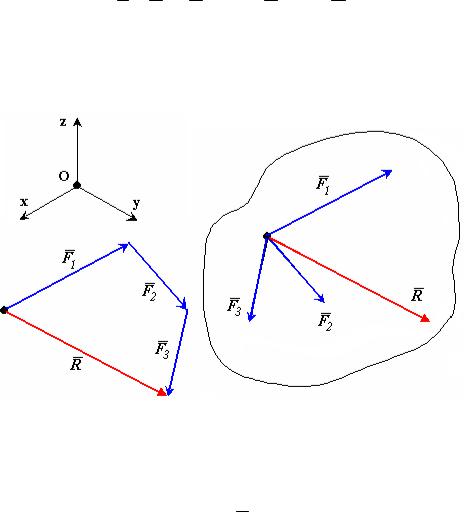
Системой сходящихся сил (или пучком сил) называется такая система сил, линии действия которых пересекаются в одной точке – центре пучка.
Равнодействующая системы сходящихся сил равна векторной сумме слагаемых сил и определяется замыкающей стороной силового многоугольника, построенного на слагаемых силах как на составляющих. Точка приложения равнодействующей силы совпадает с точкой пересечения линий действия сил (рис. 3.1).
R F1 F2 ... Fn Fi
i
Проекции равнодействующей силы на оси координат равны алгебраической сумме проекций составляющих сил на эти оси.
Rx Fix |
Ry Fiy |
Rz Fiz |
Рис. 3.1
Условия равновесия системы сходящихся сил в векторной форме
Для равновесия сходящейся системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы равнодействующая сила была равна нулю.
R 0.
12
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА |
СТАТИКА |
Версия 01.01.13 |
Ковалев Л.А. |
____________________________________________________________________
Условия равновесия системы сходящихся сил в алгебраической форме
Для равновесия пространственной системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех прямоугольных осей координат были равны нулю.
Fix 0 |
Fiy 0 |
Fiz 0 |
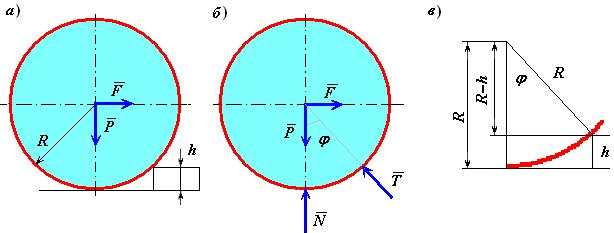
Пример 3.1. На каток веса Р (рис. 3.2, радиус катка R ), действует горизонтальная сила F . Каток упирается в выступ высотой h.
Определить: силы реакции связей; Решение:
Отбрасываем связи, действие связей заменяем силами реакции.
|
|
|
Рис. |
3.2 |
|
|
|
|
|
|
R h |
|
R h |
|
|
|
|||
cos |
|
|
arcos |
|
|
|
|
|
|
R |
|
|
|
|
|||||
|
|
R |
|
|
|
||||
Записываем условия равновесия. |
|
|
|
|
|
||||
|
x |
F T sin 0 , |
|
|
|
||||
|
y |
N P T cos 0. |
|
|
|
||||
Решаем уравнения. Из первого уравнения следует |
T |
F |
. |
||||||
sin |
|||||||||
|
|
|
|
|
|
|
|
||
Из второго уравнения следует N P T cos , |
или |
N P F ctg . |
|||||||
Момент силы относительно точки
Если под действием приложенной силы твердое тело может совершать вращение вокруг некоторой точки, то для того, чтобы охарактеризовать вращательный эффект силы, необходимо ввести новое понятие - момент силы относительно точки.
13
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА |
СТАТИКА |
Версия 01.01.13 |
Ковалев Л.А. |
____________________________________________________________________
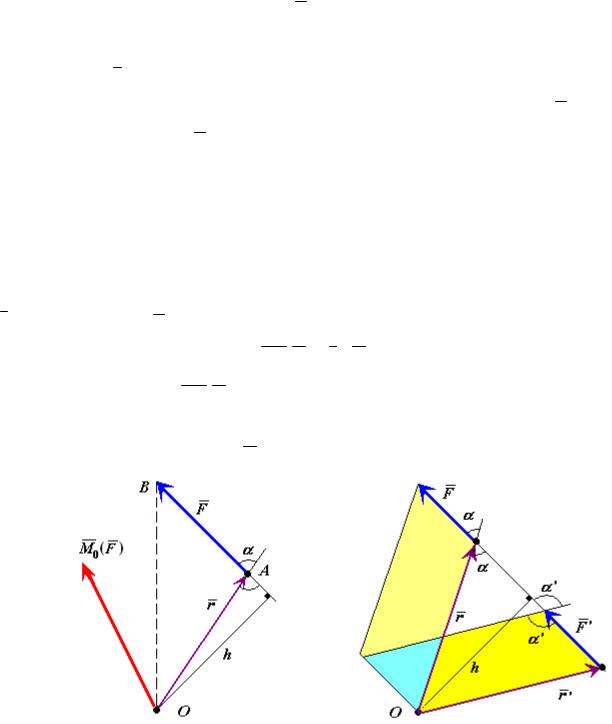
Рассмотрим тело одна точка которого неподвижна. Обозначим эту точку буквой О. На тело действует сила F , приложенная в точке А (см. рис. 3.3). Точку О называют моментной точкой. Моментную точку О соединим вектором с точкой приложения силы А. Этот вектор называют радиус-вектором
и обозначают r .
Из точки О опустим перпендикуляр на линию действия силы F .
Плечом силы |
F |
относительно точки О называется кратчайшее |
|||||||||||
расстояние между этой точкой и линией действия силы. |
|
|
|
|
|
|
|
|
|||||
Через силу |
|
и точку О можно провести плоскость. |
Сила |
|
|
пытается |
|||||||
F |
F |
||||||||||||
вращать тело вокруг оси, |
проходящей через точку О и |
перпендикулярную |
|||||||||||
плоскости в которой лежит эта сила. |
|
|
|
|
|
|
|
, |
|||||
Моментом силы |
|
|
относительно точки О называется вектор |
|
|
|
|||||||
|
|
|
M0 |
F |
|||||||||
|
F |
||||||||||||
приложенный в этой точке и равный векторному произведению радиус-вектора r на вектор силы F .
M0 F r F
Модуль вектора M0 F равен произведению модуля силы F на ее плечо
h.
M0 F F r sin F h.
Рис. 3.3 |
|
|
Рис. 3.4 |
Вектор момента |
силы |
|
относительно точки О направлен |
F |
перпендикулярно плоскости, в которой лежат сила и моментная точка (радиусвектор), в том направлении откуда видно стремление силы вращать тело против хода часовой стрелки.
Момент силы относительно точки не меняется от переноса силы вдоль линии ее действия (см. рис. 3.4).
14

ТЕОРЕТИЧЕСКАЯ МЕХАНИКА |
СТАТИКА |
Версия 01.01.13 |
Ковалев Л.А. |
____________________________________________________________________
Момент силы равен нулю, если линия действия силы проходит через моментную точку (плечо силы равно нулю).
Если сила F задана своими проекциями Fx |
Fy |
Fz |
|
на оси координат |
|||||||||||||||||||||||||||||||
и даны координаты x y |
z точки приложения этой силы, то момент силы |
||||||||||||||||||||||||||||||||||
относительно начала координат вычисляется следующим образом: |
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
j |
|
|
k |
|
|
y |
z |
|
|
|
z |
x |
|
|
|
x |
y |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
M0 F r F |
x |
|
y z |
|
i |
j |
k |
|||||||||||||||||||||||||||
|
|
F |
y |
F |
F |
F |
F |
F |
y |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Fx |
Fy |
Fz |
|
|
z |
|
|
|
z |
x |
|
|
|
x |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
y Fz z Fy i z Fx x Fz j x Fy y Fx k
Проекции момента на оси координат равны:
M0x F y Fz z Fy
M0y F z Fx x Fz
M0z F x Fy y Fx
Момент силы относительно оси
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К твердому телу в точке |
А |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
приложена сила |
|
F |
(см. рис. 3.5). |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Проведем |
в |
пространстве |
ось |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(например z). На оси z произвольно |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
выберем точку О. |
Соединим точку |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
О |
с |
|
точкой |
А радиус-вектором. |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Через точку |
О проведем плоскость |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
П перпендикулярную оси z. |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Спроектируем вектора |
|
|
|
и |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на плоскость П. |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|||||||||||
Рис. 3.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Моментом силы |
|
|
относительно |
оси называется |
вектор |
равный |
||||||||||||||||||||||
F |
||||||||||||||||||||||||||||
моменту проекции |
силы |
|
|
|
|
|
на плоскость |
|
П относительно точки |
О |
||||||||||||||||||
|
F |
|||||||||||||||||||||||||||
пересечения оси z |
с плоскостью П. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Mz |
F |
M0 |
Fn |
rn |
Fn |
|
|
|
|
|
|
|
|
||||||||||
Mz F Fn rn sin rn ,Fn Fn h .
15
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА |
СТАТИКА |
Версия 01.01.13 |
Ковалев Л.А. |
____________________________________________________________________
Свойства момента силы относительно оси:
1.Момент силы относительно оси равен нулю, если сила параллельна оси. В этом случае равна нулю проекция силы на плоскость, перпендикулярную оси.
2.Момент силы относительно оси равен нулю, если линия действия силы пересекается с осью. В этом случае равно нулю плечо силы.
Связь момента силы относительно оси с моментом силы
относительно точки.
Проведем через точку О, где задан момент силы относительно точки
|
|
|
|
|
|
|
|
декартовы оси |
координат x, y, |
z . Момент силы относительно точки |
|||||||||||||||
|
M0 |
F |
|||||||||||||||||||||||
можно |
|
представить |
|
|
|
в |
виде |
суммы |
трех |
векторов |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|||||||
|
M0 |
F |
Mx |
F |
My |
F |
Mz |
F |
Эти вектора являются |
моментами силы |
|||||||||||||||
относительно осей x, y, z соответственно.
|
|
|
M0x |
|
|
|
|
|
|
|
M0y |
|
|
|
|
|
|
|
M0z |
|
|
|
. |
Mx |
F |
F |
i |
, |
My |
F |
F |
j |
, |
Mz |
F |
F |
k |
Момент силы относительно оси равен проекции на эту ось момента силы относительно любой точки на оси.
Mz F M0 F cos Oz,M0 F
Формулы для моментов силы относительно осей координат.
Если сила F |
задана своими проекциями Fx Fy Fz на оси координат |
и даны координаты |
x y z точки приложения этой силы, относительно осей |
координат, то моменты силы относительно осей координат вычисляется следующим образом:
Mx F M0x F y Fz z Fy , My F M0y F z Fx x Fz , Mz F M0z F x Fy y Fx .
16
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА |
СТАТИКА |
Версия 01.01.13 |
Ковалев Л.А. |
____________________________________________________________________
Лекция 4
Краткое содержание: Равнодействующая двух параллельных сил. Пара сил. Теорема о сумме моментов пары сил. Теорема об эквивалентности пар сил. Теорема о переносе пары сил в параллельную плоскость. Теорема о сложении пар сил.
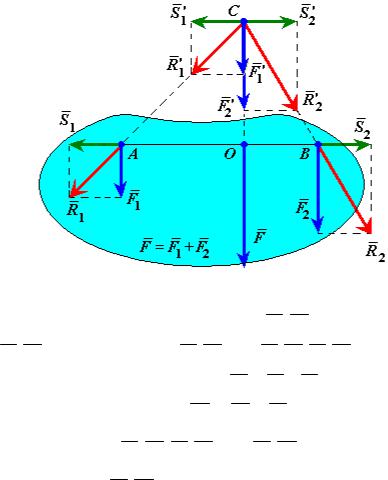
Равнодействующая двух параллельных сил, направленных в одну сторону
Теорема. Две параллельные силы, направленные в одну сторону, имеют равнодействующую силу, параллельную им, равную по модулю их сумме и направленную в ту же сторону. Линия действия равнодействующей силы расположена между линиями действия заданных сил и делит отрезок прямой между линиями действия этих сил на части, обратно пропорциональные силам.
Рис. 4.1
Доказательство: К системе из двух сил F1 ,F2 добавим уравновешенную систему сил S1,S2 (см. рис. 4.1), F1,F2 F1,F2 ,S1,S2 . Силы, приложенные
в точке А заменим равнодействующей R1 F1 S1 . Силы, приложенные в
точке В заменим равнодействующей R2 F2 S2 .
F1,F2 ,S1,S2 R1,R2 .
|
|
|
Линии действия сил R1 ,R2 |
пересекаются в точке С. |
Перенесем эти силы |
|||||||||||||||||||||||
вдоль линий действия в точку пересечения |
и |
заменим |
равнодействующей |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
, |
|
|
|
|
|
|
|
|
. Из подобия |
|
F |
R1 |
R2 |
F1 F2 . |
R1 |
R1 |
R2 |
R2 |
F1 |
F1 , |
F2 |
F2 |
||||||||||||||||
треугольников следует |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
17

ТЕОРЕТИЧЕСКАЯ МЕХАНИКА |
СТАТИКА |
Версия 01.01.13 |
Ковалев Л.А. |
____________________________________________________________________
AO |
|
S1 |
, |
BO |
|
S2 |
, следовательно |
AO |
|
BO |
. |
|
|
OC |
F |
F |
|
||||||
OC F |
|
|
|
|
F |
||||||
1 |
|
|
2 |
|
2 |
1 |
|
||||
Равнодействующая двух параллельных сил, направленных в разные стороны
Теорема. Две параллельные силы, направленные в разные стороны, имеют равнодействующую силу, параллельную им, равную по модулю разности их модулей и направленную в сторону большей по модулю силе. Линия действия равнодействующей силы расположена в точке, лежащей на прямой, между линиями действия заданных сил и делит отрезок прямой между линиями действия этих сил на части, обратно пропорциональные силам.
Рис. 4.2
Доказательство: К системе из двух сил F1 ,F2 добавим уравновешенную систему сил S1,S2 (см. рис. 4.2), F1,F2 F1,F2 ,S1,S2 . Силы, приложенные
в точке А заменим равнодействующей R1 F1 |
S1 . Силы, приложенные в |
||||||||||||||||||||||
точке В заменим равнодействующей |
|
|
|
|
|
|
|
|
|
|
. |
|
|
||||||||||
R2 |
F2 |
S2 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
||||||
F1 |
,F2 |
,S1 |
,S2 |
R1 |
,R2 |
|
|||||||||||||||||
Линии действия сил |
|
|
|
пересекаются в точке С. |
Перенесем эти силы |
||||||||||||||||||
R1 |
,R2 |
||||||||||||||||||||||
вдоль линий действия в точку пересечения и |
|
заменим |
равнодействующей |
||||||||||||||||||||
18 |
|
|
|
|
|
|
|
|
|
||||||||||||||
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА |
СТАТИКА |
Версия 01.01.13 |
Ковалев Л.А. |
____________________________________________________________________
F R1 R2 F1 F2 . |
|
R1 R1 , |
R2 R2 , |
F1 F1 , |
F2 F2 . Из подобия |
|||||||||
треугольников следует |
|
|
|
|
|
|
|
|
|
|
|
|||
|
AO |
|
S1 |
, |
|
BO |
|
S2 |
, следовательно |
AO |
|
BO |
. |
|
|
|
|
|
|
F |
|
||||||||
|
OC F |
|
|
OC F |
|
|
|
F |
||||||
1 |
|
2 |
|
|
2 |
1 |
|
|||||||
ПАРА СИЛ
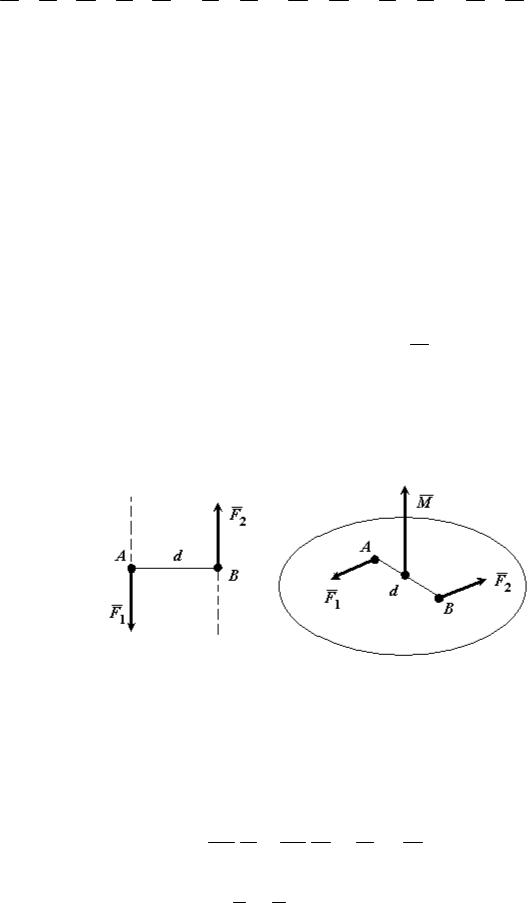
Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил, действующих на абсолютно твердое тело (см. рис. 4.3).
Плоскостью действия пары сил называется плоскость в которой расположены эти силы.
Плечом пары сил d называется кратчайшее расстояние между линиями действия сил пары.
Моментом пары сил называется вектор M , модуль которого равен произведению модуля одной из сил пары на ее плечо и который направлен перпендикулярно плоскости действия сил пары в ту сторону, откуда пара видна, стремящейся повернуть тело против хода часовой стрелки. M F1 d
Рис. 4.3
Две пары сил называются эквивалентными, если их действие на твердое тело одинаково при прочих равных условиях.
Теорема о сумме моментов пары сил. Сумма моментов сил, входящих в состав пары, относительно любой точки не зависит от выбора этой точки и равна моменту этой пары сил.
M0 F1 M0 F2 M F1 ,F2
Доказательство: Выберем произвольно точку О. Проведем из нее в
точки А и В радиус-векторы r1 и r2 (рис. 4.4).
19

ТЕОРЕТИЧЕСКАЯ МЕХАНИКА |
СТАТИКА |
Версия 01.01.13 |
Ковалев Л.А. |
____________________________________________________________________
F1 F2 , |
r2 r1 AB, |
M0 F1 M0 F2
r1 F1 r2 F2 r2 F2 r1 F2
r2 r1 F2 AB F2MA F2 M F1,F2
Что и требовалось доказать.
Рис. 4.4
Теорема об эквивалентности пар сил. Пару сил, действующую на твердое тело, можно заменить другой парой сил, расположенной в той же плоскости действия и имеющий одинаковый с первой парой момент.
Доказательство:
Пусть на твердое тело действует пара сил |
|
|
|
|
(рис. 4.5). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
F1 |
,F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Перенесем силу |
|
|
|
|
в точку O1, |
|||||||||||||||||||||||||||||||||||||||
F1 |
||||||||||||||||||||||||||||||||||||||||||||
а силу |
|
|
|
|
|
|
|
|
|
|
в |
|
|
точку |
|
|
O2 . |
|||||||||||||||||||||||||||
|
F2 |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
Проведем через |
точки |
O1 и |
||||||||||||||||||||||||||||||||||||||||||
O2 |
две любые параллельные |
|||||||||||||||||||||||||||||||||||||||||||
прямые, |
пересекающие линии |
|||||||||||||||||||||||||||||||||||||||||||
действия сил пары. |
|
|
Соединим |
|||||||||||||||||||||||||||||||||||||||||
точки |
O1 |
|
|
и O2 |
|
|
|
отрезком |
||||||||||||||||||||||||||||||||||||
прямой и разложим силы |
|
|
|
|
|
|
в |
|||||||||||||||||||||||||||||||||||||
|
F1 |
|||||||||||||||||||||||||||||||||||||||||||
точке |
|
O1 |
и |
|
|
|
|
|
в точке O2 по |
|||||||||||||||||||||||||||||||||||
F2 |
||||||||||||||||||||||||||||||||||||||||||||
правилу параллелограмма. |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
F1 |
F1 F1 , |
|
F2 |
F2 |
F2 |
||||||||||||||||||||||||||||||||||||
Так |
как |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
то |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
F1 |
F2 |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
F1 F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 F2 . |
||||||||||||||||||||||||
Система |
|
|
|
|
|
|
|
сил |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
,F2 |
||||||||||||||||||||||||||||||
эквивалентна системе сил |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
F1 ,F2 ,F1 |
,F2 . |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
Рис. 4.5
20