

§3.2 Аппроксимация характеристик нелинейных элементов
 Как
указывалось ранее, удобными характеристиками
нелинейных элементов являются не
уравнения связи, а вольтамперная
характеристика активного сопротивления
Как
указывалось ранее, удобными характеристиками
нелинейных элементов являются не
уравнения связи, а вольтамперная
характеристика активного сопротивления
![]() или
или![]() ,
или зависимость
,
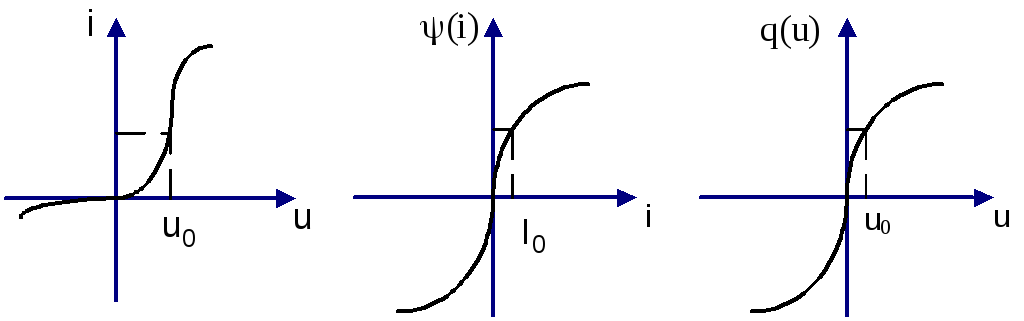
или зависимость![]() - для нелинейной индуктивности
(ампервеберная характеристика), или
зависимостьq(u)
– для нелинейной емкости (вольткулонная
характеристика) (рис.3.8).
- для нелинейной индуктивности
(ампервеберная характеристика), или
зависимостьq(u)
– для нелинейной емкости (вольткулонная
характеристика) (рис.3.8).
Рис.3.8. Виды характеристик нелинейных элементов
Однако, графическая форма характеристик нелинейных элементов (рис.3.8.) не позволяет использовать зависимости (3.1-3.15), для составления уравнений работы схем с нелинейными элементами. Поэтому одной из важнейших задач, которая возникает при анализе колебаний в схемах, содержащих нелинейные элементы, состоит в аппроксимации нелинейных характеристик. Наибольшее распространение аппроксимаций нелинейных характеристик получили полиномиальная и кусочно-линейная, а также аппроксимация с помощью различных видов трансцендентных функций.
При анализе нелинейных схем возможность получить правильный результат существенно зависит как от правильности выбора метода аппроксимации, так и от выражения аппроксимирующей функции нелинейного элемента. Возникает определенное противоречие – чем точнее аппроксимация нелинейного элемента, тем сложнее получить нужное аналитическое выражение характеристики нелинейного элемента. Но кроме этого, сложнее построить и решение нелинейного уравнения, описываюшего колебания в такой нелинейной системе, с помощью выбранного выражения аппроксимирующей функции. Поэтому правильный выбор аппроксимации нелинейной характеристики позволяет существенно упростить построение решения нелинейного уравнения. Кроме того необходимо отметить, что очень часто одну и ту же характеристику нелинейного элемента приходится по-разному аппроксимировать в зависимости от того, в каких условиях работает нелинейный элемент и какие вопросы должны быть исследованы. Поэтому, способы аппроксимации выбирают в каждом конкретном случае исследования колебаний в схемах с нелинейными элементами различными.
Рассмотрим способы аппроксимации различных функций нелинейных элементов. К наиболее распространенным способам аппроксимации нелинейных элементов относят следующие:
полиномиальная аппроксимация ─ представление нелинейной характеристики с помощью степенного ряда,
кусочно-линейная аппроксимация ─ представление аппроксимируемой функции отрезками прямых линий,
аппроксимация с помощью различных видов трансцендентных функций.
Полиномиальная
аппроксимация.
Если любая из нелинейных характеристик
задана аналитическим выражением, то в
окрестности рабочей точки функция может
быть представлена разложением в ряд
Тейлора (![]() в окрестности точки х0)
в окрестности точки х0)

или
 ,
(3.16)
,
(3.16)
где R – остаток в разложении в ряд Тейлора, которым пренебрегают при аппроксимации.
Если же характеристика задана графически (рис.3.9), то аппроксимацию можно осуществить укороченным степенным рядом (полином), ограничивая его второй - пятой степенью
![]() .
(3.17)
.
(3.17)
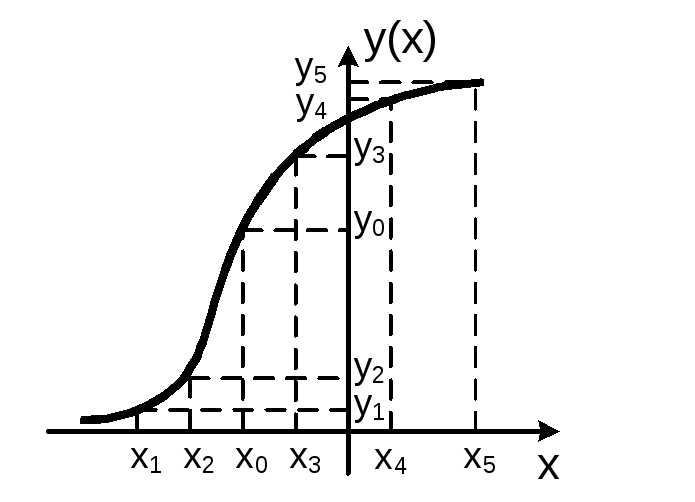
Рис.3.9. Графическое представление нелинейной характеристики
Для определения коэффициентов аk требуем, чтобы при значениях переменной xk в левой части полинома (3.17) получались значения функции yk.
Составляем систему уравнений:
 ,
где
,
где
![]() .
(3.18)
.
(3.18)
В этой системе уравнений yn, у0, xn, x0 – известные величины, поэтому эту систему можно решить по методу Крамера, относительно коэффициентов ak.
Если x=x0+S (х0 постоянное смещение, а S малый сигнал), то
 ,
(3.19)
,
(3.19)
где α – дифференциальный параметр нелинейного элемента. Таким образом, можно отметить, что первый коэффициент a1 полиномиальной аппроксимации нелинейной характеристики (3.17) совпадает с дифференциальным параметром нелинейного элемента. Кроме того отметим, что если х=0 лежит внутри интервала (х5-х1) аппроксимации нелинейной характеристики полиномом, то коэффициент а0 определяет значение функции в начале координат (т.е. если мы рассматриваем в качестве нелинейной характеристики i=φ(u), то коэффициент а0=i(0) определяется как значение тока при u=0.
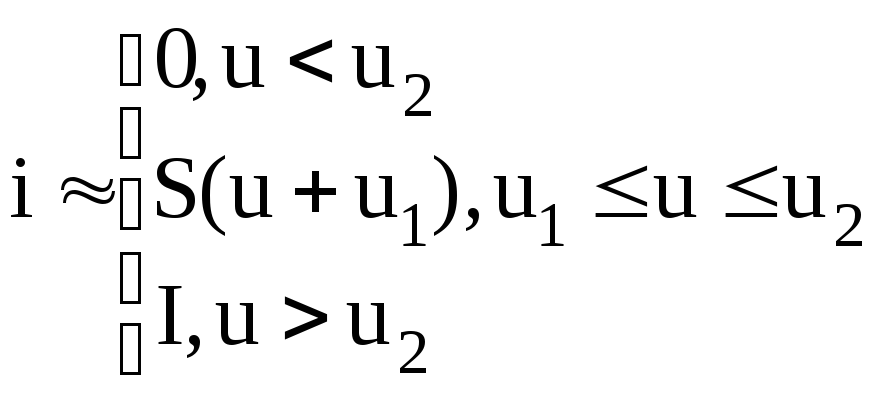
Кусочно-линейная аппроксимация. Кусочно-линейная аппроксимация основана на замене реальной характеристики нелинейного элемента отдельными участками, которые заменяются отрезками прямых линий (рис.3.10).

Рис.3.10. Кусочно-линейная аппроксимация нелинейного элемента
Точность кусочно-линейного приближения зависит от количества интервалов, заменяемых отрезками прямых в заданном интервале использования кусочно-линейной аппроксимации. Чем на большее количество отрезков прямых разбит интервал, для которого мы применяем кусочно-линейное приближение, тем выше точность совпадения с реальной нелинейной характеристикой, но при этом сушественно усложняется анализ колебаний в такой системе. Для упрощения расчетов желательно ограничиваться минимальным количеством отрезков прямых, замещающих нелинейную характеристику. Например, динамическую проходную характеристику триода (рис.3.10) можно аппроксимировать с достаточной степенью точности всего лишь тремя отрезками прямых линий:
 .
(3.20)
.
(3.20)
Замена нелинейных участков характеристик нелинейных элементов отрезками прямых, прозволяет считать и сами характеристики линейными, а это значит, что применимы теперь все методы линейной теории цепей. На протяжении линейных участков нелинейные элементы заменяются на линейные, с характеристиками равными их дифференциальным величинам.
Аппроксимация нелинейных характеристик с помощью трансцендентных функций. Иногда характеристики нелинейных элементов аппроксимируют трансцендентными функциями рис.3.11. В качестве аппроксимирующих трансцендентных функций применяются экспоненты и их суммы, тригонометрические, обратные тригонометрические, гиперболические и другие функции. Например,
![]() или
или
![]() .
(3.21)
.
(3.21)
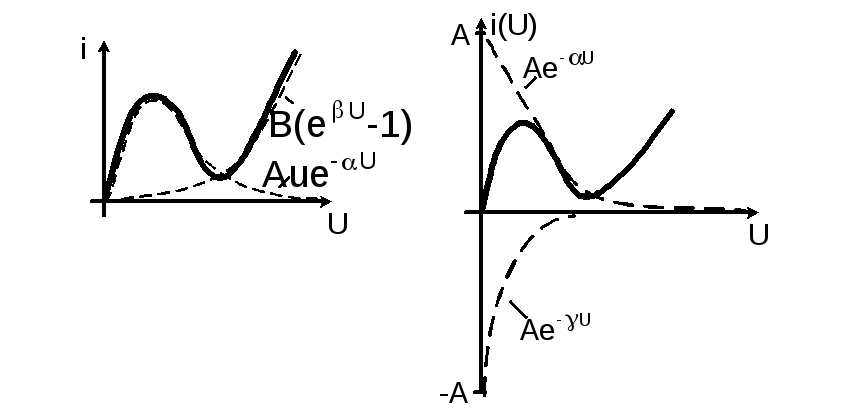
Рис.3.11. Примеры аппроксимации нелинейных характеристик
трансцендентными функциями