

Kutkovetskiy / EM_9_10_Rezistor
.doc9. Розрахунок пускових резисторів двигуна постійного струму
Завдання для розрахунку характеристик двигуна постійного струму паралельного збудження:
1. Розрахувати пускові характеристики двигуна постійного струму паралельного збудження номінальною потужністю РН = N квт (отут N – порядковий номер студента в групі), UH=220 B, n=1500 про/хв, номінальний коефіцієнт корисної дії (ККД ) ηН=0,65+0,0065N.
2. Номінальний струм двигуна (в Амперах)
![]() .
.
3. Повний опір ланцюга якоря (в Омах)з врахуванням додаткових полюсів та інш. приймається або по каталозі або визначається по формулі
![]() .
.
При пуску двигуна з паралельним збудженням необхідно виконати дві основних умови: не допустити надмірно великого пускового струму, небезпечного для обмотки якоря, щіткових контактів і колектора; забезпечити пусковий момент, необхідний для розгону двигуна з механізмом. Ці умови забезпечуються належним вибором пускового резистора.
Виходячи з рівняння напруг ланцюга ротора
![]() ,
,
(тут
![]() (В/(об/хв));
(В/(об/хв));
![]() =2
= const – падіння напруги на щітках,В;
=2
= const – падіння напруги на щітках,В;
![]() - електрорушийна сила (ЕРС ) обмотки
якора, В;
- електрорушийна сила (ЕРС ) обмотки
якора, В;
![]() - номінальний струм якора, А;
- номінальний струм якора, А;
![]() -
номінальна частота обертів, об/хв;
-
номінальна частота обертів, об/хв;
![]() -
частота обертів, об/хв) при нерухомому
якорі (n=0)
індукована
в обмотці якоря
ЕРС дорівнює нулю, тому при пуску двигуна
без пускового опору (RП=0)
струм в обмотці
якоря
-
частота обертів, об/хв) при нерухомому
якорі (n=0)
індукована
в обмотці якоря
ЕРС дорівнює нулю, тому при пуску двигуна
без пускового опору (RП=0)
струм в обмотці
якоря
![]() .
.
Тому що опір якоря в машинах постійного струму складає десяті і навіть соті частки ома, то у випадку безпосереднього пуску двигуна в хід при повній напрузі мережі струм якоря буде неприпустимо великим. Тому пуск двигуна шляхом включення якоря на повну напругу мережі застосовується тільки для двигунів малої потужності, що мають порівняно великий внутрішній опір.
При пуску двигуна в хід, струм у ланцюзі якоря обмежують включенням у ланцюг якоря пускового опору RП. При цих умовах струм ланцюга якора
![]()
В міру збільшення
частоти обертання якора опір
пускового резистора (рис.9.1) варто
зменшити, тому що буде зростати ЕРС
![]() ,
яка індуктується в якорі.
Зниженням опору резистора RП
при пуску, а
також належним вибором його значення
домагаються того, що пусковий струм і
пусковий момент двигуна за час пуску
коливаються в заданих межах, забезпечуючи
необхідні умови розгону виконавчого
механізму.
,
яка індуктується в якорі.
Зниженням опору резистора RП
при пуску, а
також належним вибором його значення
домагаються того, що пусковий струм і
пусковий момент двигуна за час пуску
коливаються в заданих межах, забезпечуючи
необхідні умови розгону виконавчого
механізму.
Розраховують пускові резистори R1, R2, R3 (рис.9.1) двома методами: графічним і аналітичним.
n0 n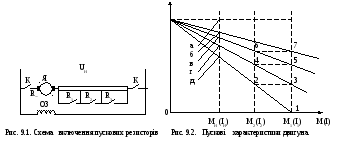
При графічному розрахунку пускового резистора будують пускову діаграму (рис. 9.2). По горзонтальній осі відкладають пускові моменти (або струми): максимальний М1(11} і мінімальний або перемикаючий М2(І2) моменти двигуна наприкінці розгону на кожній зі ступіней опору. Моменти М1(11) і М2(І2) для двигунів постійного струму звичайно приймають:
М1 = (2,0…2,5)Мн; І1 = (2,0…2,5)Ін;
М2= (1,1…1,2)Мн; І2= (1,1…1,2)Ін,
де МН, Ін — номінальний момент і струм двигуна, що у даному випадку приймаються рівними навантажувальному Мс, тобто МН = МС; Ін = Іс.
На вертикальній осі у визначеному масштабі відкладають частоту ідеального холостого ходу n0, яку можна визначити по формулі
![]() ,
або
,
або
![]() .
.
З точки, що відповідає номінальному моменту МН, проводять перпендикуляр МН,, відкладають на ньому в масштабі частоту обертання якоря nH і одержують крапку б (рис.9.2).
З'єднуючи прямої
крапку б
із крапкою
ідеального холостого ходу
![]() ,
одержують природну механічну характеристику
двигуна “п0
–б-7”.
,
одержують природну механічну характеристику
двигуна “п0
–б-7”.
Відрізок “а-б” між горизонтальної прямою “n0 –a” і природною механічною характеристикою “п0 –б-7” відповідає опору якоря RЯ.
Масштаб для опорів (Ом/мм)
![]() ,
,
де аб — відрізок прямої, що відповідає опору якор RЯ.
Пряма “n0- д – 2 – 1” буде першою штучною характеристикою, що відповідає повному опору резисторів (RЯ + R1 + R2 + R3). З крапки 1 починається розгін двигуна. При досягненні двигуном перемикаючого моменту М2 в точці 2 першу секцію резистора R1 вимикають, що зобразиться горизонталлю 2-3, проведеною через крапку 2. На перетинанні цієї горизонталі з перпендикуляром “М1 –7” знаходиться точка 3 другої штучної механічної характеристики, яка зображується прямою “n0 –г – 4 - 3”.
Відрізок гд у масштабі опорів і дає опір першої секції резистора R1. Подальша побудова характеристик ясна з рис.2. Відрізки дг, гв, вб, ба відповідають опору окремих секцій пускового резистора та якора (R1 + R2 + R3+RЯ) в порядку їхнього вимкнення (опір RЯ неможливо вимкнути).
Якщо при побудові виявиться, що остання горизонталь 6, 7 не перетинає природну характеристику в точці 7, то необхідно трохи змінити значення моменту М2(І2) і повторити побудову.
Якщо момент опору MO=MH, то відповідна стала швидкість обертання двигуна постійного струму при введенні опорів R1, R2, R3 відповідає відрізкам “МН-д”, “МН-г”, “МН-в”. Це може бути використано для регулювання швидкості двигуна, якщо резистори пускового реостата (R1, R2, R3) розраховані у тепловому відношенні на постійне (не лише на час пуску) пропускання струму ІН. При цьому сам двигун повинен мати незалежну вентиляцію, внаслідок чого умови його охолодження не змінюються зі зменшенням частоти обертів; у іншому разі треба враховувати зменшення припустимого струму якора зі зменшенням частоти обертів двигуна до 40..50% від номінального значення. Якщо навести будь-яку іншу характеристику опору на валу двигуна (вентиляторну, або іншу) то точки перетину цієї характеристики з механічними характеристиками двигуна дасть сталу частоту обертів при регулюванні частоти обертів двигуна. Вентиляторну характеристику опору можна розрахувати по формулі
![]() .
.
При аналітичному розрахунку необхідно пам'ятати, що кількість пускових ступіней прискорення для двигунів малої потужності (до 10 квт) дорівнює m=1 — 2, для двигунів середньої потужності (до 50 квт) — m=2 — 3, а для двигунів більшої потужності — m=3 — 4.
Якщо число ступіней невідомо, то їх кількість можна визначити по формулі
 ,
,
де т
— число
ступіней пускового резистора; І1
— максимальний
пусковий струм електродвигуна;
![]() - відношення максимального пускового
струму до перемикаючого.
- відношення максимального пускового
струму до перемикаючого.
Якщо т виходить дробовим, змінюють І1 або І2 так, щоб вийшло ціле число т.
Якщо кількість
ступіней резистора т
відома, то відношення
![]() можна визначити по формулах:
можна визначити по формулах:
для нормального режиму пуску (при рідких пусках) задаємося струмом переключення І2(М2) і розраховуємо
![]() ;
;
для форсованого режиму пуску (для напружено працюючих приводів з великою кількістю включень у годину) задаємося максимальним струмом І1 (M1) і розраховуємо
![]()
Опір окремих ступіней визначають у такий спосіб:
![]() ;
;
![]() ;
;
![]() і т.д.
і т.д.
Опір секцій пускового реостата
![]() ;
;
![]() і т.д.
і т.д.
10. Гальмові резистори двигуна постійного струму
Генераторний гальмовий режим з віддачею енергії в мережу має місце, якщо на вал двигуна одночасно діють моменти двигуна і механізму. Якщо момент механізму компенсує момент холостого ходу (терття), то електродвигун спочатку досягає частоти обертання ідеального холостого ходу п0, а при подальшому прискоренні частота обертання стає більше за п0. Відповідно ЕРС перевищить напруг мережі і струм можна визначити по формулі
![]()
де RA=RЯ+RД — повний опір якірного ланцюга; RД – опір додаткового тормозного резистора; n – задана частота обертів при гальмуванні (n>n0).
Струм буде мати напрямок, зворотний напрямку струму при режимі двигуна, що відповідає віддачі струму й енергії в мережу. Момент М буде також мати зворотній напрямок і бути гальмовим моментом. Такий режим роботи спостерігається, наприклад, при включении кранового електродвигуна на спуск вантажу, коли під впливом моменту навантаження, що діє у сторону спуска, частота обертання електродвигуна може перевищити частоту обертання холостого ходу. Величина опору додаткового резистора RД у цьому режимі вводиться в ланцюг якоря для одержання бажаної частоти обертів при заданому моменті на валу машини.
Для одержання частоти гальмування nт при заданому гальмовому струмі Iт,чи гальмовому моменті МТ опір додаткового резистора в ланцюзі якоря RД визначиться вираженням
![]() .
.
Гальмовий режим противключенния застосовується в підйомно-транспортних пристроях, коли электродвигун, включений на підйом, унаслідок того що його момент менше моменту вантажу, обертається на спуск.
Режим противовключения застосовується також для швидкого гальмування і реверсування електродвигунів, що досягається зміною полярності або на якоря або на обмотці збудження.
Гальмовий момент МТ чи струм ІТ регулюють введеням додаткового резистора RД у ланцюг якоря, опір якого визначають з вираження
![]() .
.
Гальмовий момент МТ або струм Іт звичайно приймають не більш (2…3)МН .
У режимі динамічного гальмування якірна
обмотка електродвигуна відключається
від мережі і замикається на гальмовий
резистор RД, а обмотка збудження
залишається вмикненою в мережу. У цьому
випадку в якорі, що обертається по
інерції, як і раніше индуцируется ЕРС
( — Е), і струм
![]() — створює гальмовий момент МT,
де RA — повний опір
якірного ланцюга.
— створює гальмовий момент МT,
де RA — повний опір
якірного ланцюга.
Для визначення опору додаткового резистора RД необхідно задатися максимальним гальмовим моментом МТ або струмом ІТ, які звичайно приймають не більш за (2…3)МН або (2…3)ІН:
![]() ,
,
де nT – частота обертів двигуна у початку гальмування.