

5.2 Теоретические основы создания индуктивных измерительных преобразователей

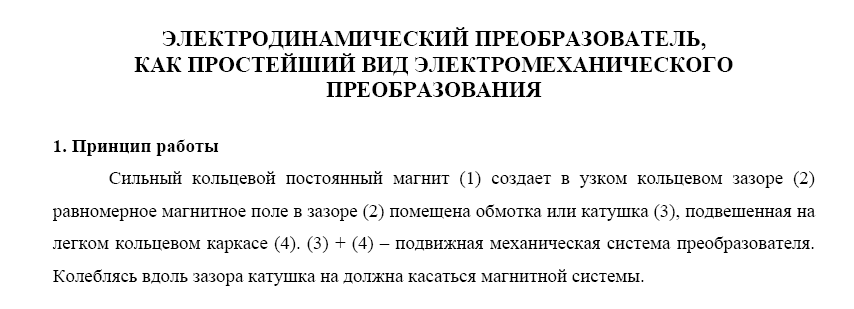
Рис. 5.2 Устройство индуктивного преобразователя:
1 - сердечник; 2 - обмотка
Для определения индуктивности катушки с проводом можно использовать следующие упрощенные соотношения:
![]() ,
,
![]() ,
(5.4)
,
(5.4)![]() ,
(5.5)
,
(5.5)
где N – число витков;
![]() - полное сопротивление
магнитной цепи;
- полное сопротивление
магнитной цепи;
![]() - активное
сопротивление магнитной цепи;
- активное
сопротивление магнитной цепи;
![]() -
реактивное сопротивление магнитной
цепи (зависит от частоты);
-
реактивное сопротивление магнитной
цепи (зависит от частоты);
![]() - потери на токи
Фуко;
- потери на токи
Фуко;
![]() - потери на
гистерезис;
- потери на
гистерезис;
![]() - потери на
запаздывание при перемагничивании;
- потери на
запаздывание при перемагничивании;
![]() - длина участков
магнитопровода;
- длина участков
магнитопровода;
![]() - магнитная
проницаемость участков магнитопровода;
- магнитная
проницаемость участков магнитопровода;
S – площадь поперечного сечения магнитопровода.
С учётом того, что
![]() магнитных материалов в тысячи раз
больше, чем для воздуха, активное
сопротивление цепи магнитопровода (
магнитных материалов в тысячи раз
больше, чем для воздуха, активное
сопротивление цепи магнитопровода (![]() )
будет определяться в основном размерами
воздушного зазора
)
будет определяться в основном размерами
воздушного зазора![]() .
.
 ;
;
![]() ;
(5.6)
;
(5.6)
![]() ;
;
![]() ;
(5.7)
;
(5.7)
![]() ;
;
 ;
(5.8)
;
(5.8)
![]() .
(5.9)
.
(5.9)
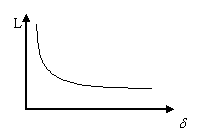
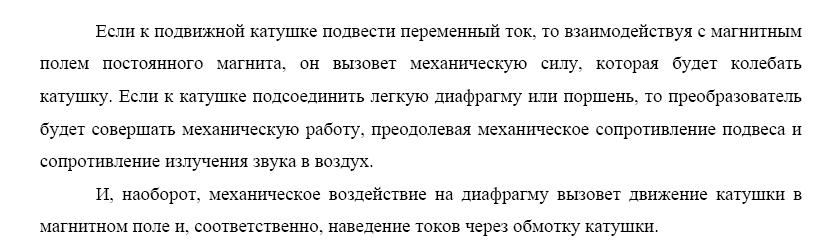
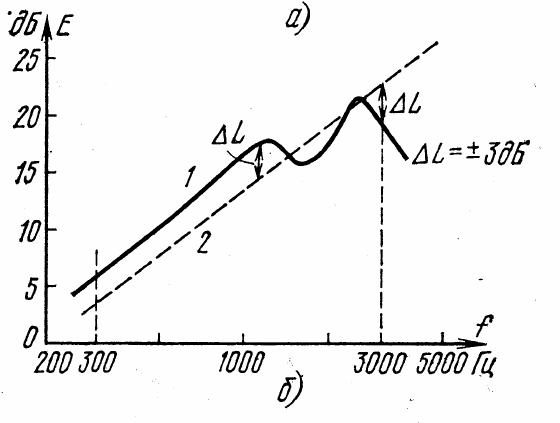
Рис. 5.3 Рабочая характеристика индуктивного преобразователя перемещений.
Как следует из
приведенного графика, при малых размерах
воздушного зазора в цепи магнитопровода
![]() может быть обеспечена достаточно высокая
чувствительность измерения микроперемещений.
может быть обеспечена достаточно высокая
чувствительность измерения микроперемещений.
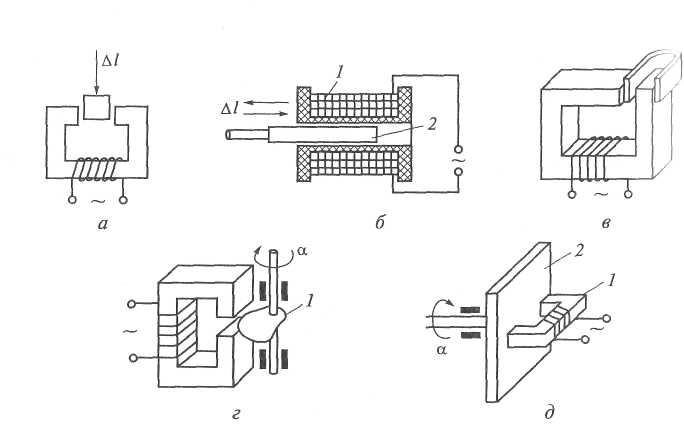
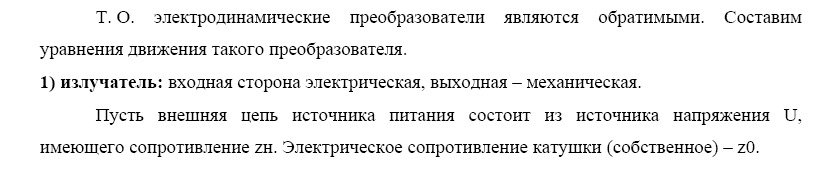
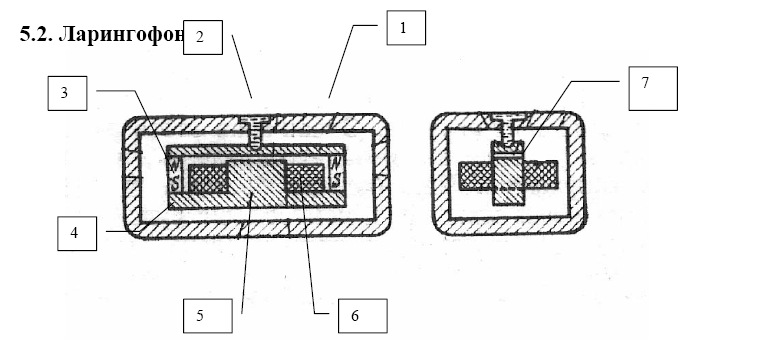
а - с изменяющейся площадью воздушного зазора; б – с разомкнутой магнитной цепью; в – с воздушным зазором и короткозамкнутым витком в зазоре; г – с изменяющимся профилем диска; д – для измерения угловых прермещений: 1- катушка; 2 – сердечник.
Для обеспечения линейности рабочей характеристики датчика перемещений широко используют соленоиды и дифференциально-трансформаторные первичные преобразователи.
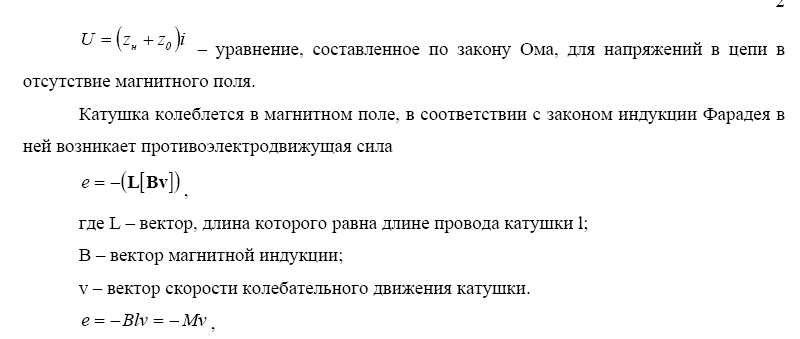
Ниже приведена конструкция и описан принцип работы дифференциального измерительного преобразователя, выполненного в виде соленоида.
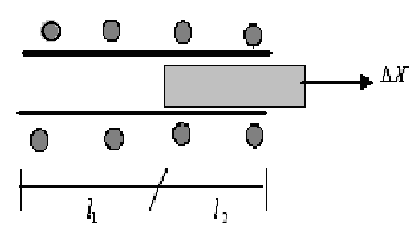

Рис. 5.5 Устройство и рабочая характеристика дифференциального индуктивного датчика.
![]() ,
,![]() ,
,
![]() ,
(5.10)
,
(5.10)
![]() ,
,
![]() (5.11)
(5.11)
![]() ,
,
![]() .
(5.12)
.
(5.12)
Рабочая характеристика дифференциального преобразователя характеризуется высокой линейностью, большим диапазоном изменения измеряемого перемещения. Применение дифференциального метода измерения позволяет существенно снизить чувствительность преобразователя к изменению температуры окружающей среды.











5.3 Принцип работы вихретоковых измерительных устройств
Для бесконтактного измерения перемещений, толщины, состава и качества покрытия широко используют вихретоковые датчики.
Рис. 5.6 Схема прибора для измерения толщины гальванических покрытий:
1 – измеряемый объект.
Принцип их работы основан на том, что ток, проходящий через катушку, создаёт переменное магнитное поле, которое, достигая объекта исследования, наводит в нём вихревые токи, создающие в свою очередь вторичное магнитное поле, взаимодействующее с первичным магнитным полем. В результате этого изменяется сопротивление катушки индуктивности, ток в цепи, сдвиг фаз между током и напряжением.
Рис. 5.7 ЭЭСЗ вихретокового преобразователя.
 ,
,
![]() ,
(5.13)
,
(5.13)
![]() ,
,
![]() ,
(5.14)
,
(5.14)
где:
![]() - взаимная индуктивность контуров;
- взаимная индуктивность контуров;
x – измеряемое расстояние до стенки или толщина покрытия.
Как следует из приведенных зависимостей, при изменении расстояния до объекта или его свойств, происходит изменение параметров в эквивалентной схеме замещения преобразователя: изменяется величина тока в измерительной цепи, активное и реактивное сопротивления; происходит дополнительный сдвиг фаз между током и напряжением в измерительной цепи.
Глубина проникновения
магнитного поля в вещество (![]() )
зависит от частоты тока и характеристик
материала объекта исследования:
)
зависит от частоты тока и характеристик
материала объекта исследования:
![]() (5.15)
(5.15)
![]() - удельное
сопротивление материала;
- удельное
сопротивление материала;
![]() - частота тока;
- частота тока;
μ – магнитная проницаемость материала.
Например, для алюминия на частоте 50 кГц глубина проникновения электромагнитной волны в материал составляет 10 мм, а на частоте 500 кГц, соответственно - 0,1 мм.
Значение «вносимых» сопротивлений в измерительную цепь преобразователя зависит от толщины и свойств исследуемого материала. Поэтому устройства данного типа используют для контроля: линейных размеров тонких пластин; толщины покрытия; обнаружения дефектов в материале и т.п. Для этого создают разнообразные конструкции датчиков: экранные; накладные; щелевые.
К недостаткам первичных преобразователей данного типа следует отнести сильное влияние температуры.